






一、什么是点云
点云(point cloud)是空间中点的数据集,可以表示三维形状或对象,通常由三维扫描仪获取。点云中每个点的位置都由一组笛卡尔坐标 ( X , Y , Z ) (X, Y, Z) (X,Y,Z)描述,有些可能含有色彩信息 ( R , G , B ) (R, G, B) (R,G,B)或物体反射面强度(Intensity)信息。强度信息的获取是激光扫描仪接受设备采集到的回波强度,此强度信息与目标的表面材质、粗糙度、入射角方向,以及仪器的发射能量,激光波长有关。
二、点云的特点
点云数据的空间排列形式根据测量传感器的类型分为:阵列点云、线扫描点云、面扫描点云以及完全散乱点云。大部分三维激光扫描系统完成数据采集是基于线扫描方式,采用逐行(或列)的扫描方式,获得的三维激光扫描点云数据具有一定的结构关系。 点云的主要特点如下:
① 数据量大。三维激光扫描数据的点云量较大,一幅完整的扫描影像数据或一个站点的扫描数据中可以包含几十万至上百万个扫描点,甚至达到数亿个。
② 密度高。扫描数据中点的平均间隔在测量时可通过仪器设置,一些仪器设置的间隔可达1. 0mm ( 拍照式三维扫描仪可以达到0.05mm),为了便于建模,目标物的采样点通常都非常密。
③ 带有扫描物体光学特征信息。由于三维激光扫描系统可以接收反射光的强度,因此,三维激光扫描的点云般具有反射强度信息, 即反射率。有些三维激光扫描 系统还可以获得点的色彩信息。
④ 立体化。点云数据包含了物体表面每个采样点的三维空间坐标,记录的信息全面,因而可以测定目标物表面立体信息。由于激光的投射性有限,无法穿透被测目标,因此点云数据不能反映实体的内部结构、材质等情况。
⑤ 离散性。点与点之间相互独立,没有任何拓扑关系,不能表征目标体表面的连接关系。⑥可量测性。地面三维激光扫描仪获取的点云数据可以直接量测每个点云的三维坐标、点云间距离、方位角、表面法向量等信息,还可以通过计算得到点云数据所表达的目标实体的表面积、体积等信息。
⑥ 非规则性。激光扫描仪是按照一定的方向和角度进行数据采集的,采集的点云数据随着距离的增大、扫描角越大,点云间距离也增大,加上仪器系统误差和各种偶然误差的影响,点云的空间分布没有一定的规则。
三、点云的处理
1. 点云分割
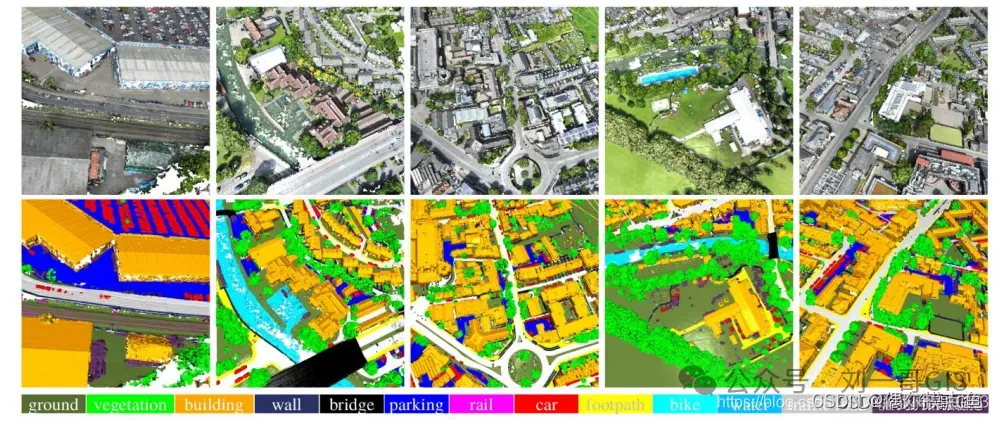
点云分割是根据空间、几何和纹理等特征对点云进行划分,使得同一划分内的点云拥有相似的特征,点云的有效分割往往是许多应用的前提,例如逆向工程,CAD领域对零件的不同扫描表面进行分割,然后才能更好地进行空洞修复曲面重建、特征描述和提取,进而进行基于3D内容的检索,组合重用等。
例如下图就是将一幅图片分割成n块,结合点云分类和对象识别,我们可以标记出地面、墙、建筑、车辆等内容:
经典的点云分割算法主要有:1)随机采样一致方法(RANSAC);2)欧式聚类分割方法;3)条件欧式聚类分割;4)基于区域生长得分割;5)基于颜色的区域生长分割;6)最小图割的分割;7)基于法线微分的分割;8)基于超体素的分割。
2. 点云补全
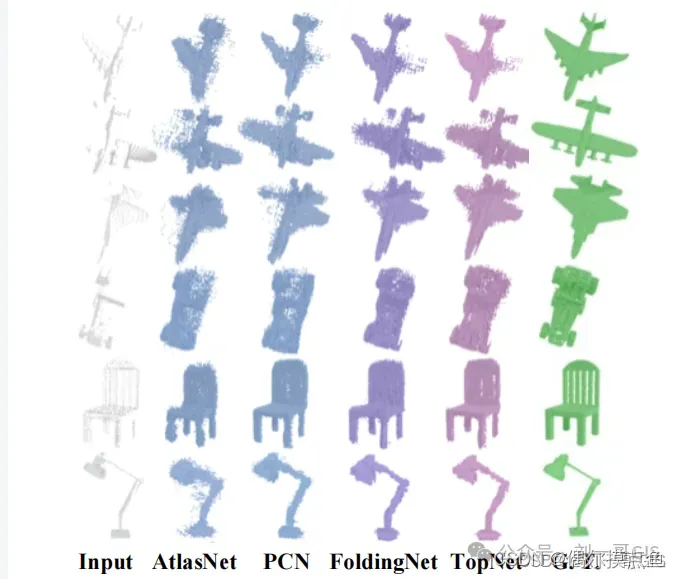
点云补全(Point Cloud Completion)用于修补有所缺失的点云(Point Cloud),从缺失点云出发估计完整点云,从而获得更高质量的点云,如下图:
3. 点云上采样
点云上采样与点云补全不同,前者是提高点云在局部patch中的均匀性,而后者根据点云的部分输入生成完整的目标。
点云上采样的方法主要有三种:
-
基于优化的方法:这些方法都不是以数据驱动的,它们严重依赖于先验知识,如光滑曲面的消耗、法向估计等;
-
基于深度学习的方法:一般使用现有的点云特征提取网络(pointnet,pointnet++。DGCNN)等提取特征,然后进行上采样;
-
生成对抗网络GAN:GAN可以对点云进行形状补全、三维目标生成等,同样地,也可以使用GAN进行点云上采样预测的工作。
4. 点云压缩
由于点云是海量点的几何,存储点云不仅会消耗大量的内存,而且不利于传输,也没有那么大的带宽可以支持将点云不经过压缩直接在网络层进行传输,因此需要对点云进行压缩。
截止至目前,可对点云进行压缩的点云编码框架国际上主要是G-PCC和V-PCC,这两个都是有MPEG提供的。G-PCC的全称是Geometry Point Cloud Compression(基于几何的点云压缩);V-PCC全称是Vedio Point Cloud Compression(基于视频的点云压缩)。
从技术层面来说,G-PCC编码的主体思想是按照其几何信息进行的,利用八叉树进行几何信息的编码,再在几何信息编码的基础上利用插值计算残差对其属性进行编码。V-PCC编码的主体思想是将三维点云转换成图像,然后再利用图像或视频编码技术进行点云编码。
从压缩对象来说,G-PCC编解码框架主要是用于上述第一类静态点云和第三类动态获取点云的压缩。V-PCC编解码框架主要是用于上述第二类动态点云的压缩。G-PCC编解码框架也称为点云编解码器TMC13,V-PCC编解码框架也称为点云编解码器TMC2。
国内对点云进行压缩的点云编码框架是音视频编码标准(Audio Vedio Standard, AVS)提供的AVS-PCC编解码框架。
5. 点云配准
点云配准分为粗配准(Coarse Registration)和精配准(Fine Registration)两个阶段。
精配准的目的是在粗配准的基础上让点云之间的空间位置差别最小化。应用最为广泛的精配准算法应该是ICP以及ICP的各种变种(稳健ICP、point to plane ICP、Point to line ICP、MBICP、GICP、NICP)。
粗配准是指在点云相对位姿完全未知的情况下对点云进行配准,可以为精配准提供良好的初始值。当前较为普遍的点云自动粗配准算法包括基于穷举搜索的配准算法和基于特征匹配的配准算法。
6. 点云目标检测
这个比较容易理解,就是使用点云数据进行目标检测,如下图:
7. 点云去噪
7.1噪声的分类
-
漂移点
-
孤立点
-
冗余点
-
混杂点
7.2 点云去噪算法
(1)有序点云数据的滤波算法
中值、均值及高通滤波。
(2)散乱点云数据的去噪
拉普拉斯算法、双边滤波算法、平均滤波流算法、均值漂移算法


















 8404
8404

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











