




目录
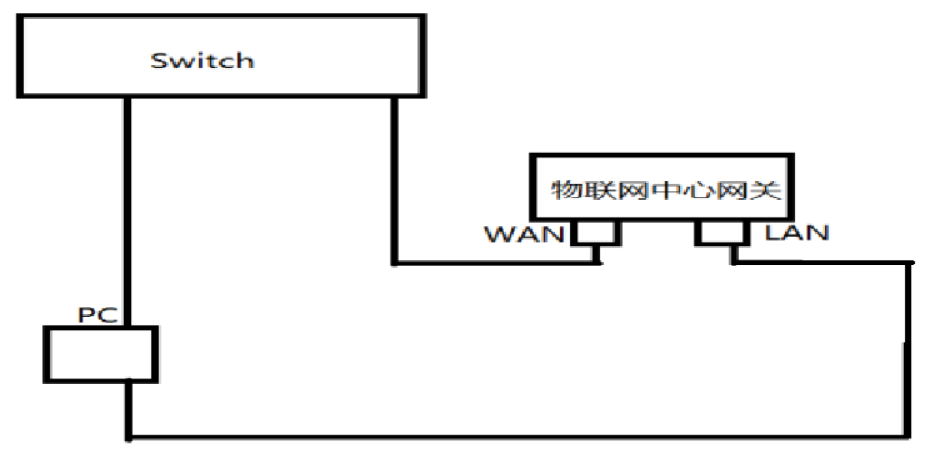
请画出你所在工位的计算机、物联网网关、实训室交换机网络拓扑结构图
完成基于CAN总线通信的生产线监控系统工程实践后,请完成以下任务。
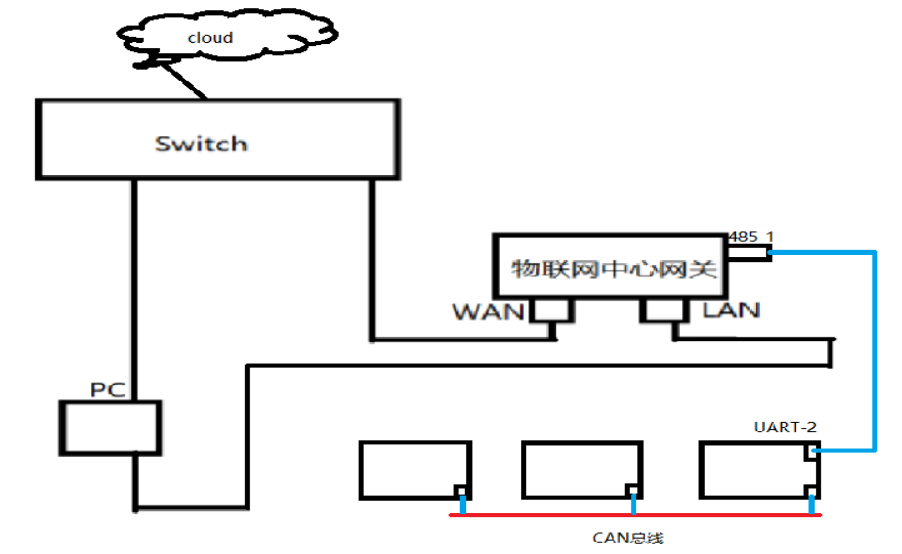
1. 画出生产线监控系统工程的拓扑结构图,并说CAN总线通信机制。
罗列基于CAN总线通信的产线监控系统实践的主要操作步骤,并说明每一步要注意的问题
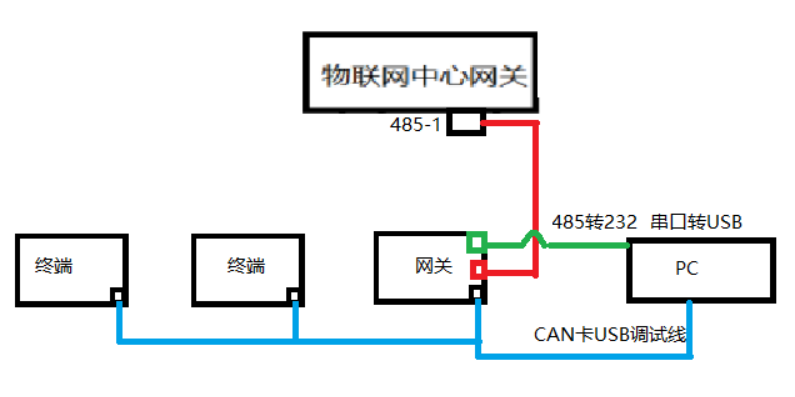
画出使用CAN卡与相应软件提取RS-485网络1数据的设备拓扑结构图,并分析数据。
画出使用RS-485转RS232转接头提取RS-485网络2数据的结构图,并分析串口数据。
请画出你所在工位的计算机、物联网网关、实训室交换机网络拓扑结构图
完成基于CAN总线通信的生产线监控系统工程实践后,请完成以下任务。
1. 画出生产线监控系统工程的拓扑结构图,并说CAN总线通信机制。
通信机制详解
1. 节点平等性
CAN总线采用多主架构,所有节点地位平等。每个节点都可以:
- 自主决定何时发送数据(无需主控制器协调)
- 主动向总线发送消息
- 接收总线上的所有消息(通过消息ID过滤)
这种设计避免了单点故障风险,当某个节点失效时,其他节点仍可正常通信。
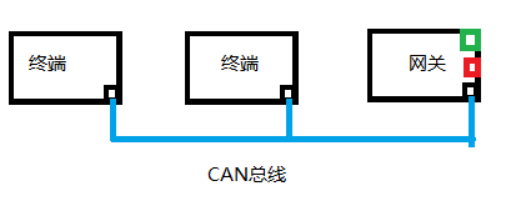
2. 物理连接方式
典型连接方案:
- 使用双绞线(常用AWG22规格)作为传输介质
- 总线两端需连接120Ω终端电阻(匹配特性阻抗)
- 差分信号传输:
- CAN_H:典型电压2.5V(隐性)→3.5V(显性)
- CAN_L:典型电压2.5V(隐性)→1.5V(显性)
- 电压差:0V(隐性)→2V(显性)
抗干扰特性:
- 双绞线结构有效抑制共模干扰
- 差分传输对电磁干扰(EMI)具有天然免疫力
- 典型通信距离:
速率(kbps) 最大距离(m) 1000 40 500 100 250 250 125 500
3. 优先级仲裁机制
仲裁过程详解:
- 当多个节点同时发送时,从ID最高位开始逐位比较
- 显性位(0)会覆盖隐性位(1):
- 发送0的节点会检测到总线为0
- 发送1的节点检测到总线为0时,会停止发送
- 仲裁示例:
- 节点A发送ID:0010 1001 011
- 节点B发送ID:0010 1010 101
- 在比较第6位时(从左数第6bit):
- A发送1(隐性)
- B发送0(显性)
- B赢得仲裁
ID规范:
- 标准帧:11位ID(0x000-0x7FF)
- 扩展帧:29位ID(0x00000000-0x1FFFFFFF)
- 特殊ID约定:
- 0x000:最高优先级
- 0x7FF/0x1FFFFFFF:最低优先级
- 0x7DF:通常用于诊断报文
注意:为了避免总线冲突,建议系统设计时合理分配ID,确保关键消息(如刹车指令)获得最高优先
罗列基于CAN总线通信的产线监控系统实践的主要操作步骤,并说明每一步要注意的问题
编译,不能有错误
烧写,串口烧写或者ST-Link烧写,串口烧写每次NEWlab上只能有一个设备
终端机设置属性和地址 0011 0022
网关机设置属性和地址 0033
画出使用CAN卡与相应软件提取RS-485网络1数据的设备拓扑结构图,并分析数据。
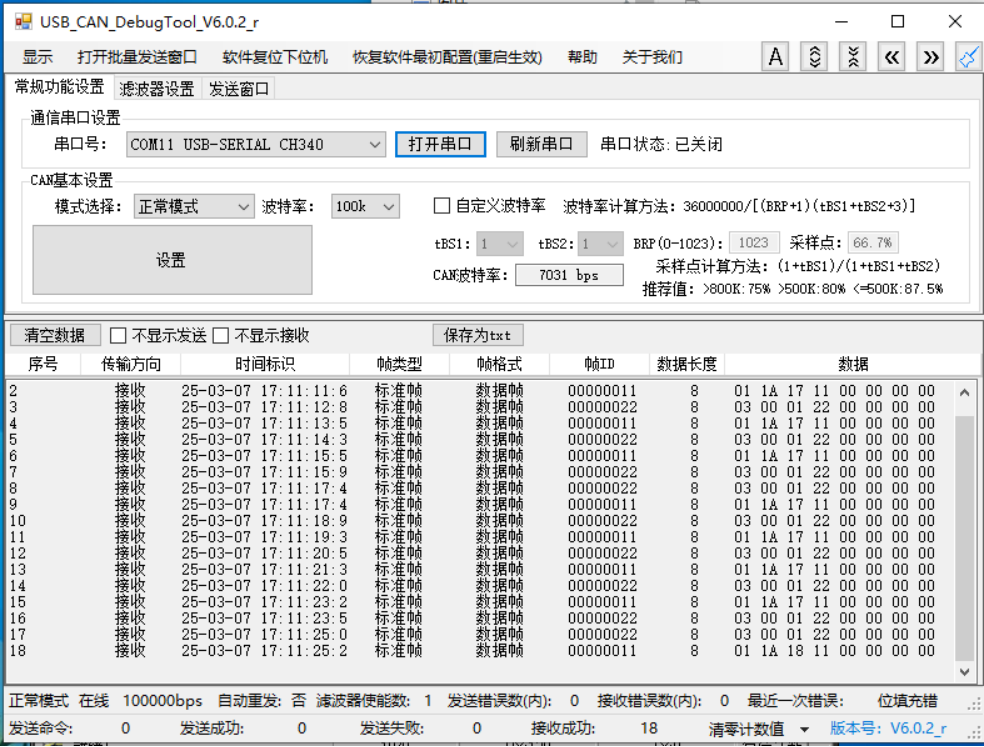
01 1A 18 11 00 00 00 00
二进制表示:
0000 0001 0001 1010 0001 1000 0000 0000 0000 0000 0000 0000
帧结构解析:
-
第 0 位(帧起始)
- 显性电平(逻辑0)
- 用于标识CAN帧的开始,同步节点通信时序
-
第 1 ~ 12 位(仲裁段)
- 标准帧中仲裁段占11位(实际数据位为第1-11位,第12位为保留位)
- 本示例值:0001 1010 000(二进制)→ 0x1A0(十六进制)
- 功能:决定报文优先级,数值越小优先级越高
- 冲突处理:多个节点同时发送时,持续发送显性电平(0)的节点赢得仲裁
-
第 13 位(标识位)
- 显性电平(0):表示标准帧(11位标识符)
- 隐性电平(1):表示扩展帧(29位标识符)
- 本帧为显性电平,说明是标准CAN帧格式
典型应用场景:
- 汽车电子中ECU(如发动机控制单元)发送转速信号
- 工业控制中PLC传输设备状态信息(标准帧占CAN总线通信量的80%以上)
协议说明:
- 标准帧(CAN 2.0A)最大支持2048种不同报文ID
- 扩展帧(CAN 2.0B)通过该位区分,可支持超过5亿种报文ID
- 显性电平(0)会覆盖隐性电平(1)是CAN总线仲裁的基础机制
画出使用RS-485转RS232转接头提取RS-485网络2数据的结构图,并分析串口数据。
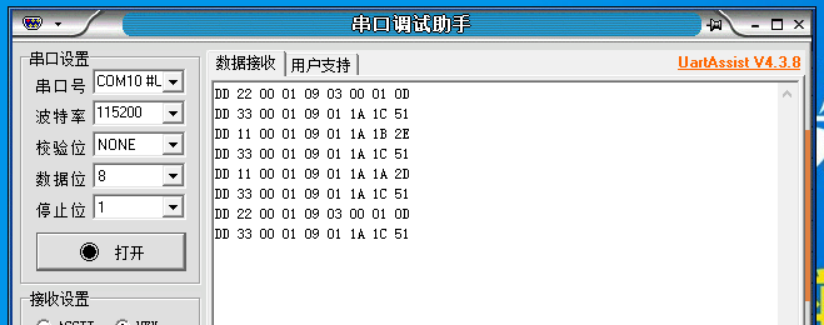
例如
DD 22 00 01 09 03 00 01 0D
DD 固定帧
00 22 地址
01 命令码
09 数据长度
03 传感器类型
00 01 传感器数据
0D CS校验位

















 820
820

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









