







还没有阅读前两篇的朋友请点击下面的文章进行阅读,它们是读懂这篇文章的基础! 欢迎大家点赞收藏,在这里提前感谢大家的鼓励:)
双目视觉标定-2.单目视觉标定opencv代码实战-优快云博客
双目视觉是人们感知物体深度的一种方法,Stereo Calibration的stereo是两个的意思。人类的双目视觉启发了计算机双目视觉的探索,在这一篇文章中,我会向大家介绍如何进行双目视觉相机标定,后续几篇会陆续写不同的应用(目标检测,计算深度),又给自己挖坑,以后填不上,我就回来把这句话删除哈哈哈哈
目录
3. 立体图像校正 Stereo Image Rectification
4. 立体图像对应关系Stereo Image Correspondance
1. 立体视觉主要步骤
双目视觉标定主要包含以下步骤:
- 对每个相机进行单目相机标定 Camera Calibration: 得到去除失真后的图片,以及每个相机的内参矩阵K,以及失真矩阵D
- 立体图像标定 Stereo Calibration:涉及计算两个相机之间的相对空间关系
- 立体图像校正 Stereo Image Rectification:立体图像校正投影从左右摄像机获取的图像,使图像位于同一平面上。校正图像的行完美对齐,以便左图像中的点落在左图像和右图像的同一行上
- 计算立体图像对应关系Stereo Image Correspondance:在左右校正图像之间建立匹配,以生成视差图 Disparity Map。视差图是一种 2D 图像,它使用灰度值来指示左右图像中的特征之间的视差或距离,视差值表示物体的相对深度
- 此教程产生的深度以及视差信息都基于左侧立体校正后图像
为了简便,他们需要符合一些假设:
- 两个相机都有相同的焦距
- 他们之间的基线baseline与相机坐标系的x轴平行
- 世界的原点与左侧相机坐标系的原点重合
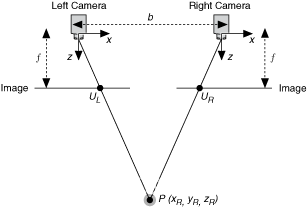
真实世界的P(xR,yR,zR),它投影在两侧相机的相平面的相应坐标是UL,UR. 这两个点到各自相机的z轴的距离可以被表示成向量uL,uR,于是跟以前一样,用相似三角形可以得出如下的关系,你可能会问x-b是负的,这没问题吗?因为原点在左侧相机,距离是x轴到相应点,所以右侧是负的
![]()
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 3153
3153

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









