







 本文详细介绍了视觉成像中的3D坐标如何通过相机坐标系和图像坐标系转换为像素坐标,包括径向畸变和切向畸变的解释,以及内参矩阵和外参矩阵在标定过程中的作用。
本文详细介绍了视觉成像中的3D坐标如何通过相机坐标系和图像坐标系转换为像素坐标,包括径向畸变和切向畸变的解释,以及内参矩阵和外参矩阵在标定过程中的作用。
在这篇文章里面,我们会讨论视觉成像理论,以及现实世界中的3D坐标如何转换成照片图像中的相应坐标2d pixel坐标,语言十分通俗,对初学者很友好
目录
1. 世界坐标体系 World Coordinate System
2. 相机坐标体系 Camera Coordinate System
3. 图像坐标体系 Image Coordinate System
0. 相机导致的画面畸变 Distortion
针孔相机会引起画面的畸变,一共有两大种类的畸变:
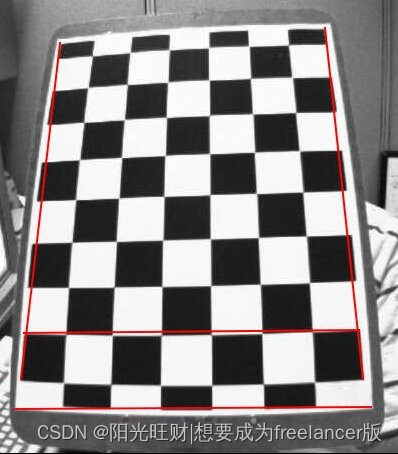
1. 径向畸变 Radial distortion
导致直线变弯,离镜头中心越远的点, 产生的畸变越多. 比如下图的棋盘格中的红线是直线,但是他对应的线条是曲线
2. 切向畸变 Tangential distortion
由于照照片的棱镜与成像平面不是完全平行的,所以画面中某些部分看起来比实际上更近
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1682
1682

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









