







混合现实应用的核心就是如何在现实世界中放置看起来真实的全息影像,这涉及到全息图的精确定位,无论是在现实世界还是在虚拟世界中,Hololens 为我们提供了空间坐标系统(spatial coordinate systems)来方便几何图形的定位。
一、空间坐标系统
所有的三维应用程序都是使用笛卡尔坐标系来描述物体的位置和方向,沿着坐标系建立 X,Y,Z轴。空间坐标系以米为单位表示其坐标值,因此可以十分方便的渲染对象和环境。
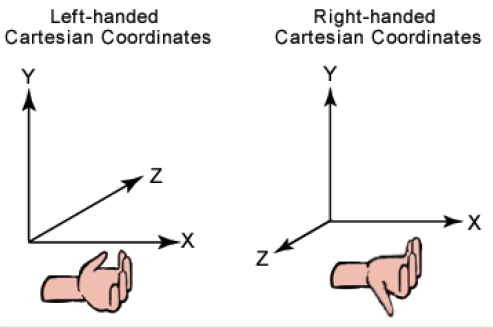
Hololens 采用右手笛卡尔坐标系,也就是说 X 轴正方向指向右边,Y 轴正方向与重力平行且指向上方,Z轴正方向朝向你。
笛卡尔坐标系的左手和右手的区别就是 Z 轴的方向是朝向你还是远离你。将左手和右手平放均指向右方,将手指弯曲指向上方,此时大拇指的朝向就是 Z 轴的朝向。
二、坐标参考框架
在全息渲染中,有些影像需要跟随用户头部的移动而移动,有些影像在用户头部移动时需要始终保持在固定的位置上。
Hololens 为我们提供了两种参考框架,分别是静止参考框架(Stationary frame of reference) 和附加参考框架(Attached frame of reference)。
2.1 附加参考框架
附加参照框架中,当用户移动或转动头部的时候,内容也会跟着走。当 Hololens 无法获取空间信息时,就只会渲染基于附加参照框架的全息图。例如程序在丢失空间映射时,弹出一个正在扫描空间信息的界面,来帮助用户。
2.2 静止参考框架
在编写游戏、VR程序时,传统做法是建立一个,绝对
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 347
347

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









