



并查集是一种用于处理不交集问题的数据结构,以及一些图的连通操作
find操作 →O(1)\rightarrow O(1)→O(1)
union操作 O(n log n)O(n\;log\;n)O(nlogn)
L2-048
编码
对地图中的每一组 (i,j)(i,j)(i,j),可以不重复地表示为 i×m+ji\times m+ji×m+j 的形式。
解码
同样地,对一个 i×m+ji\times m+ji×m+j ,也可以得到唯一的
{i=vmj=i mod m\begin{cases}i=\frac{v}{m}\\j=i\bmod m\end{cases}{i=mvj=imodm
至此,我们可以使用一个数 nnn 来唯一表示地图矩阵中的一点,这么做是为了避免在并查集中使用 pair 存储点坐标。
总体思路
通过并查集表示各个岛屿,并且在处理并查集的过程中同步记录各个连通块中的最大值。最后遍历各个并查集的内容确定岛屿和宝藏数量。
为了避免超时,需要使用路径压缩优化查询的时间复杂度。
偏移量搜索周围元素
定义偏移量数组 dx={−1,0,1,0},dy={0,1,0,1}d_x=\{-1,0,1,0\},d_y=\{0,1,0,1\}dx={−1,0,1,0},dy={0,1,0,1},表示上下左右四个方向。
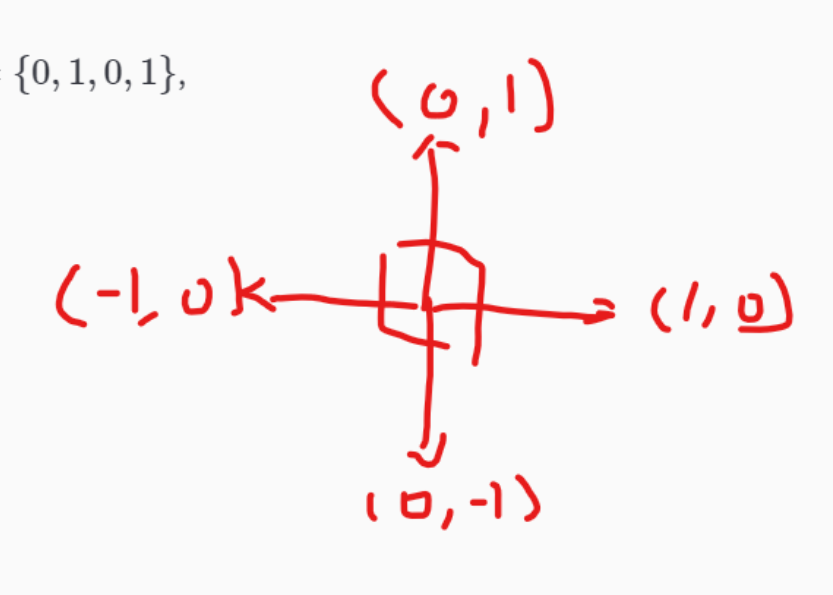
注意在循环更新坐标的时候要检查是否越界。
路径压缩
int find(int u){//路径压缩
return u == p[u] ? p[u] : (p[u] = find(p[u]));
}
这个就是检查当前值是否等于特征节点的值,如果是,则将 u 设为 p[u],中断递归,否则将其设置为其父节点(也就是 p[u] 的值),向上搜索直到根节点为止。
这个 find 函数最终会返回根节点的值,再将根节点和当前节点直接连通即可。
#include <bits/stdc++.h>
using namespace std;
vector<int> p;
vector<char> mx;//宝藏
int find(int u){//路径压缩
return u == p[u] ? p[u] : (p[u] = find(p[u]));
}
int n,m;
vector<string> g;
int dx[] = {-1,0,1,0};
int dy[] = {0,1,0,-1};
int main(){
cin >> n >> m;
g.resize(n);//地图
p.resize(n*m);//标记地图上每个岛屿点的根节点
mx.resize(n*m);//把岛屿的父节点标记成宝藏的值
for(auto &s : g) cin >> s;//读入地图
for(int i = 0;i<n*m;i++){
p[i] = i;
mx[i] = g[i / m][i % m];//根绝地图特征值确定坐标,mx如果
}//初始化并查集,令其特征节点均为自身
for(int i = 0;i<n;i++){
for(int j = 0;j<m;j++){
if(g[i][j] == '0'){
continue;
}
//陆地上下左右合并联通块
int u = i*m + j;//确定坐标特征值
for(int k = 0;k<4;k++){
int ni = i + dx[k], nj = j + dy[k];
if(ni < 0 || ni >= n || nj < 0 || nj >= m) continue;//越界
int v = ni*m + nj;//当前检查的坐标的特征值
if(g[ni][nj] != '0'){
u = find(u);//找该节点所在路径上的根节点,压缩当前路径
v = find(v);
if(u != v){//还未合并入当前连通块,合并之
p[u] = v;
mx[v] = max(mx[u], mx[v]);//标记宝藏节点
}
}
}
}
}
int num_cc = 0,num_t = 0;
for(int i = 0;i<n*m;i++){
if(p[i] == i){
int x = i / m;
int y = i % m;
if(g[x][y] != '0'){
num_cc++;
if(mx[i] > '1'){
num_t++;
}
}
}
}
cout << num_cc << " " << num_t;
}


















 1807
1807

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











