







目录
2.运行roslaunch carla_ad_demo carla_ad_demo.launch 命令行一直显示Waiting for a route...
温馨提醒:
该博客只列出本人在遇到的问题,不包含carla-rosbridge的安装教程,如有需要,可以去carla官方文档自行安装,而且网上相关的资料也有很多,话不多说开始整理。
电脑配置:
ubuntu系统:18.04
carla:0.9.14(虚拟环境python3.7)
ros:melodic(默认python2.7)
问题汇总:
1.CARLA崩溃
4.26.2-0+++UE4+Release-4.26 522 0
Disabling core dumps.
Signal 11 caught.
Malloc Size=65538 LargeMemoryPoolOffset=65554
CommonUnixCrashHandler: Signal=11
Malloc Size=131160 LargeMemoryPoolOffset=196744
Malloc Size=131160 LargeMemoryPoolOffset=327928
Engine crash handling finished; re-raising signal 11 for the default handler. Good bye.
Segmentation fault (core dumped)
解决办法:端口被占用,重启电脑或者换个端口号打开carla
2.运行roslaunch carla_ad_demo carla_ad_demo.launch 命令行一直显示Waiting for a route...
解决办法:可能的原因是networkx版本太旧了,没有更新版本,导致无法加载一些东西,导致路径规划无法生效,输入以下命令:
sudo apt remove python-networkx
pip install --user networkx参考链接:Carla 0.9.13 与ROS bridge安装记录_signal 11 caught. malloc size=65538 largememorypoo-优快云博客
但是我自己使用该方法行不通,系统显示已经安装了networkx,后来发现我用的是python2.7,所以要用python2安装,输入下面的命令:
pip2 install networkx然后再次启动ros-bridge,界面显示中的车辆动起来了。
3.不能启动ros-bridge
运行roslaunch carla_ros_bridge carla_ros_bridge.launch后出现下面错误

解决办法:每次运行前都得source一下
source ~/carla-ros-bridge/catkin_ws/devel/setup.bash再次运行即可解决。
4.python版本问题
困扰我最久的一个问题,目前虽然解决了,但是不知道用起来稳不稳定,但至少是能运行了
就是我的carla是安装在conda的python3.7环境下,而ubuntu18.04适配的ros版本是melodic,它默认的版本是python2.7,这就导致用3.7编译的carla不能与2.7的ros兼容,只要运行就会出现这个报错:
ImportError: dynamic module does not define module export function (PyInit__tf2)
这就是因为python版本不兼容导致的,使用了这个博主的解决方法,但是没有解决问题,然后又继续查阅相关资料.......
#特别注意:此时我的环境变量里边添加的是carla-0.9.14-py3.7-linux-x86_64.egg,这个是用python3.7编译完产生的文件,在这里困扰了很久
在经过无数次尝试后,解决办法是用python2.7再编译一次carla,然后Dist目录下会生成carla-0.9.14-py2.7-linux-x86_64.egg和carla-0.9.14-cp27-cp27mu-linux_x86_64.whl,然后将.egg文件导入环境变量,详见下面图片:
make PythonAPI ARGS="--python-version=2" #用python2编译carla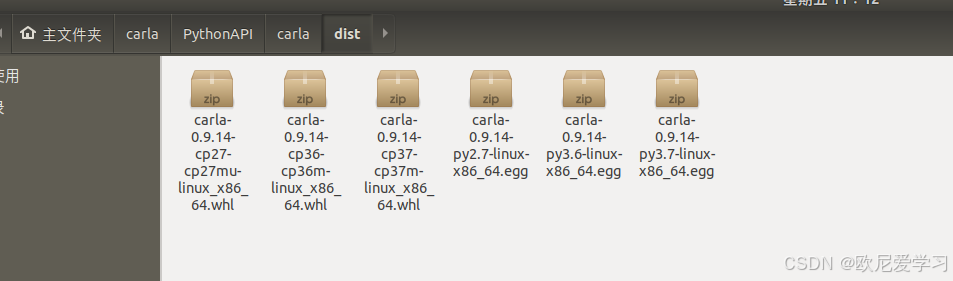
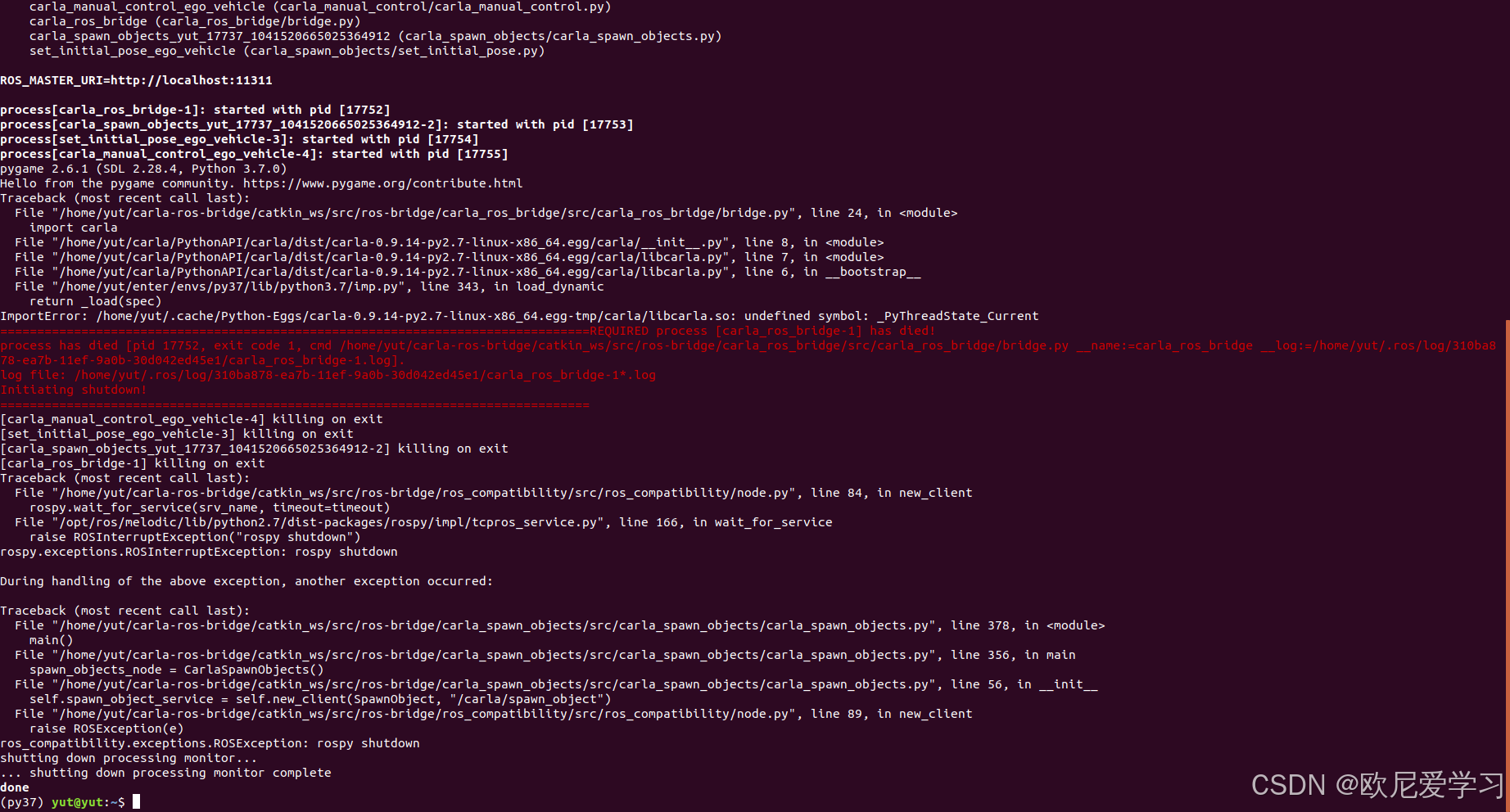
vim ~/.bashrc  把carla相关的环境变量配置好,然后运行
把carla相关的环境变量配置好,然后运行
source ~/.bashrc 必须注意:运行ros是在系统环境下,也就是python2.7环境,不能在虚拟环境里运行,否则会出现下面的错误:
以上就是目前为止搭建carla-ros-bridge遇到的问题,欢迎各位小伙伴一起交流学习~
参考过的资料:https://zhuanlan.zhihu.com/p/581857903(干货)
Carla 0.9.13 与ROS bridge安装记录_signal 11 caught. malloc size=65538 largememorypoo-优快云博客
Carla基础 | Carla预编译版安装与ROS联合仿真图文教程-优快云博客
Carla 0.9.13 与ROS bridge安装记录_signal 11 caught. malloc size=65538 largememorypoo-优快云博客
Ununtu 18.04 安装Carla 0.9.13 以及Carla ros bridge 超级避坑指南(更新于2022.10.20)_carla已经运行,并点击了play播放按键-优快云博客


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









