







c++间接平差法对闭合导线进行平差
环境:vs2017+qt+eigen-3.3.8
对源代码文件读取和输出进行适当修改可以不搭配qt工具
算法
(1)基本公式

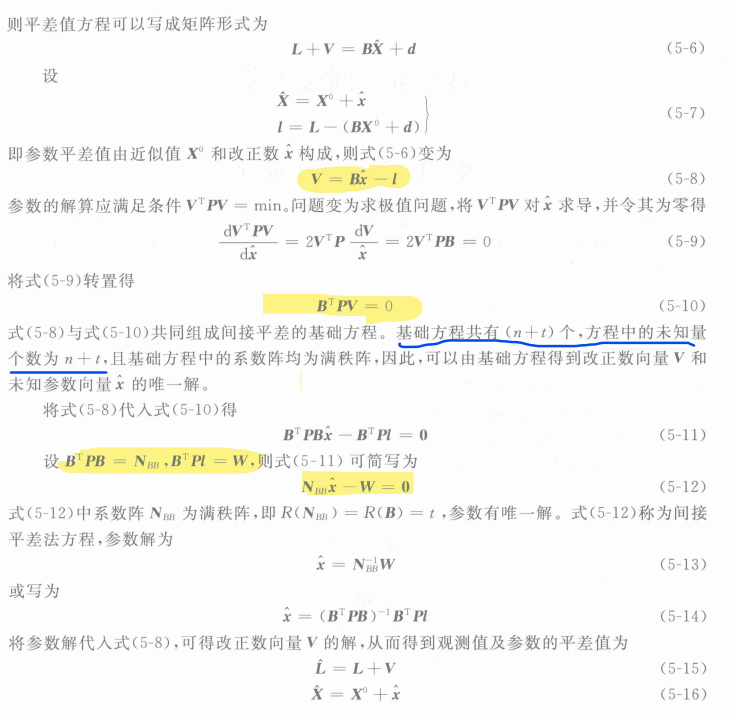 (2)对角度和边长观测值进行线性化
(2)对角度和边长观测值进行线性化
角度值: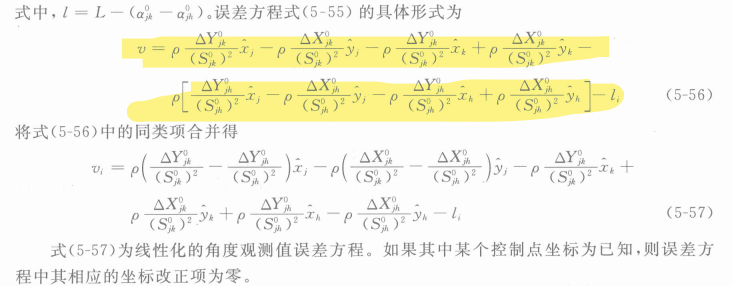
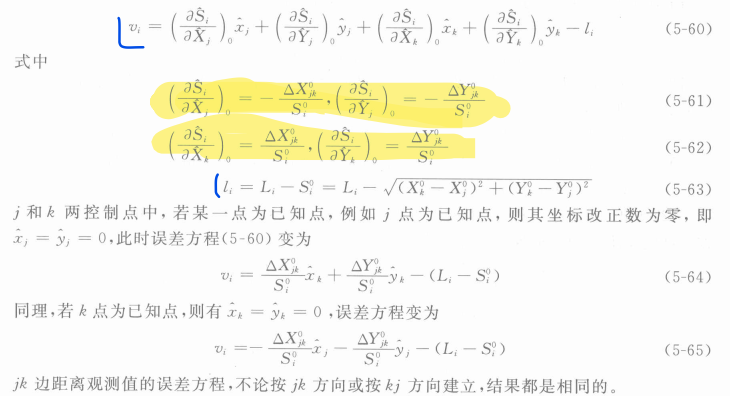
边长值:
程序介绍
ui界面
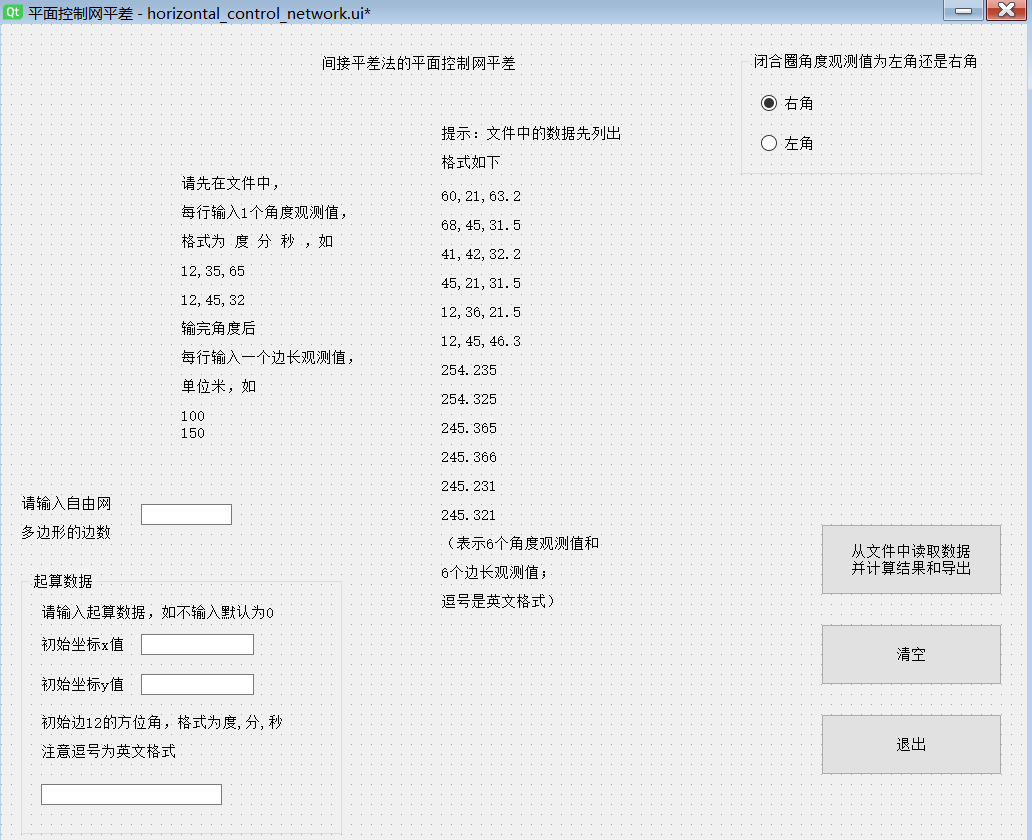
示例数据:
90, 30, 49.73
268, 10, 9.48
94, 6, 33.22
87, 54, 54.23
180, 17, 42.47
90, 57, 23.22
179, 20, 51.72
89, 14, 10.73
132, 10, 25.47
227, 16, 59.73
200.78625
51.02175
110.6125
198.17775
276.3395
166.78125
200.0075
128.38675
65.24225
258.52325
只适合如图所示的闭合导线类型(即不带支导线)数据仅供参考

代码
头文件:
#pragma once
#include <QtWidgets/QWidget>
#include "ui_horizontal_control_network.h"
class horizontal_control_network : public QWidget
{
Q_OBJECT
public:
horizontal_control_network(QWidget *parent = nullptr);
int compute();
~horizontal_control_network();
private:
Ui::horizontal_control_networkClass ui;
};
mian函数
#include "horizontal_control_network.h"
#include <QtWidgets/QApplication>
int main(int argc, char *argv[])
{
QApplication a(argc, argv);
horizontal_control_network w;
w.show();
return a.exec();
}
主要计算函数
int horizontal_control_network::compute()函数为窗口响应函数
#include "horizontal_control_network.h"
#include<qpushbutton.h>
#include<qmessagebox.h>
#include <QTextEdit>
#include <QStringList>
#include<qdebug.h>
#include<cmath>
#include<Eigen/Dense>
#include<stdio.h>
#include<iostream>
#include <QFileDialog> //文件对话框
#include <fstream>
#define PI acos(-1)
//根据反正切值、delta_y\delta_x返回边长方位角
double pd(double fw, double deltay, double deltax) {
if (fw > 0) {
if (deltay > 0 && deltax > 0)return fw;
else if (deltay < 0 && deltax <0) {
return PI + fw;
}
else {
return fw;
}
}
else if(fw<0){
if (deltay < 0 && deltax>0)return 2 * PI + fw;
else if(deltay >0 && deltax<0)return PI +fw;
else return fw + 2 * PI;
}
else if((int)(fw*1e10)==0){
if(deltax<0 ) return PI;
else return 0;
}
}
//double类型的数据做等于判断
bool dy(double a,double b) {
if (int(a*1e10) == int(b*1e10)) return true;
else return 0;
}
//根据两个坐标方位角,求出之间的夹角
double pda(double a, double b) {
double jiao;
if (a - b < 0)return a - b + 2 * PI;
else return a +b;
}
using namespace std;
//转换角度 ,单位秒
double tsa(double a, double b, double c) { return a * 3600 + b * 60 + c; }
//转换角度,单位度
double tsan(double a, double b, double c) { return a + b / 60 + c / 3600; }
double yushu(double x, int a) {//double类型的做余数
double f = x - (int)x;
int b = (int)x;
int z = (b %= a);
return z + f;
}
//让方位角的角度变为正数
void pn(double fw[20][3], int i) {
int a, b, c, y, j;
double sum;
for (j = 0; j < i; j++) {
sum = fw[j][0] * 3600 + fw[j][1] * 60 + fw[j][2];
if (fw[j][0] < 0) {
y = (-sum) / 360 / 3600;
sum = sum + (y + 1) * 360 * 3600;
}
fw[j][0] = (int)(sum / 3600), sum = yushu(sum, 3600);
fw[j][1] = (int)(sum / 60), sum = yushu(sum, 60);
fw[j][2] = sum;
}
}
//求两点之间的距离
double enorm(double x1, double y1, double x2, double y2) {
return sqrt(pow(x1 - x2, 2) + pow(y1 - y2, 2));
}
horizontal_control_network::horizontal_control_network(QWidget *parent)
: QWidget(parent)
{
ui.setupUi(this);
//读取文件并输出按钮的槽函数
connect(ui.pushButton_2, &QPushButton::clicked, this, [=] {
compute();
});
//清空
connect(ui.pushButton_3, &QPushButton::clicked, this, [=]() {
ui.lineEdit->clear();
ui.lineEdit_2->clear();
ui.lineEdit_3->clear();
ui.lineEdit_4->clear();
});
//退出功能
connect(ui.pushButton_4, &QPushButton::clicked, this, &QWidget::close);
}
int horizontal_control_network::compute()//计算函数
{
int n, i = 0, j = 0, chose = 1;
double rou = 180 / PI * 3600;
n = ui.lineEdit->text().toInt();
//初始化二维数组
double s[20],fwj[20],xy[20][2],angle[20][3] ,fw[20][3];
if (ui.lineEdit->text().isEmpty()) {
QMessageBox::critical(this, "warning", "Please input the number of edges");
return 0;
}
//判断已知数据是否为空,并赋值
if (ui.lineEdit_2->text().isEmpty()) { xy[0][0] = 0; }
else { xy[0][0] = ui.lineEdit_2->text().toDouble(); }
if (ui.lineEdit_3->text().isEmpty()) { xy[0][1] = 0; }
else { xy[0][1] = ui.lineEdit_3->text().toDouble(); }
if (ui.lineEdit_4->text().isEmpty()) { fw[0][0] = 0; fw[0][1] = 0; fw[0][2] = 0; }
else {
QString fw0 = ui.lineEdit_4->text();
QStringList flist = fw0.split(','); i = 0;
for (QString str : flist) { fw[0][i] = str.toDouble(); i++; }
if (i != 3) {
QMessageBox::critical(this, "warning", "The beginning azimuth's format error");
return 0;
}
}
if (ui.radioButton_2->isChecked()) chose = 2;
//文件对话框
QString in_path = QFileDialog::getOpenFileName(this, "OPEN", "../", "TXT(*.txt)");//设置文件路径 文件格式
if (in_path.isEmpty() == false) {//路径正确
//创建文件对象 并且关联起来
QFile file(in_path);
bool isok = file.open(QIODevice::ReadOnly);//利用只读模式打开文件
if (isok) {//打开成功
QString text = file.readAll();//换行符号也是读取的
QStringList list = text.split('\n');// 使用换行分隔字符串,将其转换为QStringList
i = 0;
for (QString str : list) {
if (i < n) {//读取角度观测值
QStringList list1 = str.split(',');
j = 0;
for (QString str1 : list1) {
angle[i][j] = str1.toDouble();
j++;
}
if (j != 3) {
QMessageBox::critical(this, "warning", "Angle format error"); file.close();return 0;
}
}
else {//读取边长观测值
s[i - n] = str.toDouble();
}
i++;
}
if (i != 2 * n) {
QMessageBox::critical(this, "warning", "data error"); file.close();return 0;
}
}
else {
QMessageBox::critical(this, "warning", "Failed to open observation data file, exiting function"); file.close(); return 0;
}
}
else {
QMessageBox::critical(this, "warning", "The observation data file path is empty"); return 0;
}
//fwj[0] = fw[0][0] + fw[0][1] / 60 + fw[0][2] / 3600;
//储存初始方位角
if (chose == 1)
for (j = 1; j < n; j++) {
fw[j][0] = (int)fw[j - 1][0] + 180 - angle[j][0], fw[j][1] = (int)fw[j - 1][1] - angle[j][1], fw[j][2] = fw[j - 1][2] - angle[j][2];
}
else
for (j = 1; j < n; j++) {
fw[j][0] = (int)fw[j - 1][0] - 180 + angle[j][0], fw[j][1] = angle[j][1] + (int)fw[j - 1][1], fw[j][2] = angle[j][2] + fw[j - 1][2];
}
//保证角度格式
for (j = 0; j < n; j++) {
if (fw[j][2] >= 60) fw[j][1] += (int)(fw[j][2] / 60), fw[j][2] = yushu(fw[j][2], 60);
if (fw[j][1] >= 60) fw[j][0] += (int)(fw[j][1] / 60), fw[j][1] = (int)(yushu(fw[j][1], 60));
if (fw[j][2] <= -60) fw[j][1] += (int)(fw[j][2] / 60), fw[j][2] = -yushu(abs(fw[j][2]), 60);
if (fw[j][1] <= -60) fw[j][0] += (int)(fw[j][1] / 60), fw[j][1] = (int)(-yushu(abs(fw[j][1]), 60));
}
pn(fw, n);//该函数是将负的分、秒值改正
for (j = 0; j < n; j++) fwj[j] = fw[j][0] + fw[j][1] / 60 + fw[j][2] / 3600;
//起始方位角不能输入90度或270度
if (dy(fwj[0], 90)||dy(fwj[0],270)) {
QMessageBox::critical(this, "warning", "Please do not enter an azimuth angle of 90 degrees or 270 degrees"); return 0;
}
//计算近似坐标
for (j = 1; j < n; j++) {
xy[j][0] = xy[j - 1][0] + s[j - 1] * cos(fwj[j - 1]/180*PI);
xy[j][1] = xy[j - 1][1] + s[j - 1] * sin(fwj[j - 1]/180*PI);
}
//误差方程系数的计算
//创建矩阵,并初始化为0矩阵
Eigen::MatrixXd l = Eigen::MatrixXd::Zero(2 * n , 1);
Eigen::MatrixXd L = Eigen::MatrixXd::Zero(2 * n , 1);
Eigen::MatrixXd B = Eigen::MatrixXd::Zero(2 * n , 2 * n - 3);
Eigen::MatrixXd P = Eigen::MatrixXd::Zero(2 * n , 2 * n );
Eigen::MatrixXd X = Eigen::MatrixXd::Zero(2 * n - 3, 1);//参数近似值矩阵
//近似参数赋值
//把第2个点的x坐标当做参数
X(0, 0) = xy[1][0];
for (i = 2; i < n; i++) {
X(2 * (i - 2)+1, 0) = xy[i][0];
X(2 * (i - 2) + 2, 0) = xy[i][1];
}
//边长近似值和常数向量赋值
//边长近似值
for (i = n; i < 2 * n ; i++) {
if (i == 2 * n - 1) {
L(i) = enorm(xy[i - n ][0], xy[i - n ][1], xy[0][0], xy[0][1]);
}
else
L(i) = enorm(xy[i - n ][0], xy[i - n ][1], xy[i - n +1][0], xy[i - n +1][1]);
l(i) = (s[i - n ] - L(i))*1000;//单位毫米
}
//角度观测值系数的计算
//L向量和l向量赋值
for (i = 0; i < n; i++) {
double a, b,day,dax,dby,dbx;
if (i == 0) {
a = atan((xy[n - 1][1] - xy[0][1]) / (xy[n - 1][0] - xy[0][0])); day = xy[n - 1][1] - xy[0][1]; dax = xy[n - 1][0] - xy[0][0];
b = atan((xy[1][1] - xy[0][1]) / (xy[1][0] - xy[0][0])); dby = xy[1][1] - xy[0][1]; dbx = xy[1][0] - xy[0][0];
}
else if (i == n - 1) {
a = atan((xy[n - 2][1] - xy[n - 1][1]) / (xy[n - 2][0] - xy[n - 1][0])); day = xy[n - 2][1] - xy[n - 1][1]; dax = xy[n - 2][0] - xy[n - 1][0];
b = atan((xy[0][1] - xy[n - 1][1]) / (xy[0][0] - xy[n - 1][0])); dby = xy[0][1] - xy[n - 1][1]; dbx = xy[0][0] - xy[n - 1][0];
}
else {
a = atan((xy[i - 1][1] - xy[i][1]) / (xy[i - 1][0] - xy[i][0])); day = xy[i - 1][1] - xy[i][1]; dax = xy[i - 1][0] - xy[i][0];
b = atan((xy[i + 1][1] - xy[i][1]) / (xy[i + 1][0] - xy[i][0])); dby = xy[i + 1][1] - xy[i][1]; dbx = xy[i + 1][0] - xy[i][0];
}
a = pd(a, day, dax);//确定后视边长方位角
b = pd(b, dby, dbx);
if(chose==1) L(i) = pda(a ,b);//单位弧度
else L(i) = pda(b, a);
P(i, i) = 1;//权阵赋值
}
//改正角度正负号
/*for (i = 0; i < n; i++) {
double ch = L(i)*180/PI;
if ((int)(L(i) * 180 / PI) != angle[i][0]) {
QMessageBox::critical(this, "warning", "Angle sign correction error"); return 0;
};
}*/
//观测值-近似值
for (i = 0; i < n; i++) {
l(i) = (tsan(angle[i][0], angle[i][1], angle[i][2])*PI / 180 - L(i))*rou;//弧度秒
}
//B矩阵赋值
/*在闭合圈中i为循环遍历所在点(角);
又因为第一点xy[0][0],xy[0][1]和第二点的xy[1][1]为已知点,其微分值为0,当其有计算程序时,需要分类讨论
并且B矩阵的第一列参数应从第二点的x坐标开始,
j为当前点的x坐标参数在B矩阵的列的索引,k为后视点x坐标索引,h为前视点x坐标索引
*/
for (i = 0; i < n; i++) {
int j, k, h;
j = 2 * (i - 2)+1, k = 2 * (i - 2)-1, h = 2 * (i - 2) + 3;//i>=3
if (i == 0) {
B(i, 2 * n - 5) = -rou / pow(L(2*n - 1), 2)*(xy[n - 1][1] - xy[0][1])/1000;
B(i, 2 * n - 4) = rou / pow(L(2 * n - 1), 2)*(xy[n - 1][0] - xy[0][0]) / 1000;
B(i, 0) = rou / pow(s[0], 2)*(xy[1][1] - xy[0][1]) / 1000;
}
else if (i == n - 1) {
B(i, 2 * n - 5) = rou * ((xy[n - 2][1] - xy[n - 1][1]) / pow(L(2 * n - 2), 2) - (xy[0][1] - xy[n - 1][1]) / pow(L(2 * n - 1), 2)) / 1000;
B(i, 2 * n - 4) = -rou * ((xy[n - 2][0] - xy[n - 1][0]) / pow(L(2 * n - 2), 2) - (xy[0][0] - xy[n - 1][0]) / pow(L(2 * n - 1), 2)) / 1000;
B(i, 2 * n - 7) = -rou / pow(L(2 * n - 2), 2)*(xy[n - 2][1] - xy[n - 1][1]) / 1000;
B(i, 2 * n - 6) = rou / pow(L(2 * n - 2), 2)*(xy[n - 2][0] - xy[n - 1][0]) / 1000;
}
else if (i == 1) {
B(i, 0) = rou * ((xy[0][1] - xy[1][1]) / pow(s[0], 2) - (xy[2][1] - xy[1][1]) / pow(L(n+1), 2)) / 1000;
B(i, 1) = rou / pow(L(n+1), 2)*(xy[2][1] - xy[1][1]) / 1000;
B(i, 2) = -rou / pow(L(n+1), 2)*(xy[2][0] - xy[1][0]) / 1000;
}
else if (i == 2) {
B(i, j) = rou * ((xy[i - 1][1] - xy[i][1]) / pow(L(n + i - 1), 2) - (xy[i + 1][1] - xy[i][1]) / pow(L(n + i ), 2)) / 1000;
B(i, j + 1) = -rou * ((xy[i - 1][0] - xy[i - 1][0]) / pow(L(n + i -1), 2) - (xy[i + 1][0] - xy[i][0]) / pow(L(n + i ), 2)) / 1000;
B(i, 0) = -rou / pow(L(n + i -1), 2)*(xy[i - 1][1] - xy[i][1]) / 1000;
B(i, h) = rou / pow(L(n + i ), 2)*(xy[i + 1][1] - xy[i][1]) / 1000;
B(i, h + 1) = -rou / pow(L(n + i ), 2)*(xy[i + 1][0] - xy[i][0]) / 1000;
}
else {
B(i, j) = rou * ((xy[i - 1][1] - xy[i][1]) / pow(L(n + i - 1), 2) - (xy[i + 1][1] - xy[i][1]) / pow(L(n+i), 2)) / 1000;
B(i, j + 1) = -rou * ((xy[i - 1][0] - xy[i - 1][0]) / pow(L(n + i - 1), 2) - (xy[i + 1][0] - xy[i][0]) / pow(L(n + i ), 2)) / 1000;
B(i, k) = -rou / pow(L(n + i - 1), 2)*(xy[i - 1][1] - xy[i][1]) / 1000;
B(i, k + 1) = rou / pow(L(n + i - 1), 2)*(xy[i - 1][0] - xy[i][0]) / 1000;
B(i, h) = rou / pow(L(n + i ), 2)*(xy[i + 1][1] - xy[i][1]) / 1000;
B(i, h + 1) = -rou / pow(L(n + i ), 2)*(xy[i + 1][0] - xy[i][0]) / 1000;
}
}
//距离观测值系数计算
for (i = n; i < 2 * n ; i++) {
//B矩阵系数赋值
int j = 2 * (i - n-1)-1, h = 2 * (i - n -1)+1;//i>n+1;j为后视点,h为前视点
if (i == 2 * n - 1) {
B(i, j) = -(xy[0][0] - xy[i - n ][0]) / L(i);
B(i, j + 1) = -(xy[0][1] - xy[i - n ][1]) / L(i);
}
else if (i==n) {
B(i, 0) = (xy[1][0]-xy[0][0] ) / L(i);
}
else if (i == n + 1) {
B(i, 0) = -(xy[i - n + 1][0] - xy[i - n][0]) / L(i);
B(i, h) = (xy[i - n + 1][0] - xy[i - n][0]) / L(i);
B(i, h + 1) = (xy[i - n + 1][1] - xy[i - n][1]) / L(i);
}
else {
B(i, j) = -(xy[i - n +1][0] - xy[i - n ][0]) / L(i);
B(i, j + 1) = -(xy[i - n +1][1] - xy[i - n][1]) / L(i);
B(i, h) = (xy[i - n +1][0] - xy[i - n ][0]) / L(i);
B(i, h + 1) = (xy[i - n+1 ][1] - xy[i - n ][1]) / L(i);
}
//权阵
P(i, i) = 1/ pow((2 + 3 * L(i)*1e-3), 2);
}
//矩阵解算
Eigen::MatrixXd NBB(2 * n - 3, 2 * n - 3);
Eigen::MatrixXd x(2 * n - 3, 1);
Eigen::MatrixXd v(2 * n , 1);
Eigen::MatrixXd L_(2 * n , 1);
Eigen::MatrixXd QXX(2 * n - 3, 2*n-3);
Eigen::MatrixXd DXX(2 * n - 3, 2 * n - 3);
NBB = B.transpose()*P*B;
QXX = NBB.inverse();
x = NBB.inverse()*B.transpose()*P*l;//毫米
//当起始方位角为90度或270度时,将第2个坐标的y值变为参数,x置零
v = B * x - l;//角度为弧度秒,距离是毫米
Eigen::MatrixXd zh(1,1);//从一行一列矩阵提取单位权中误差所需数字
zh= v.transpose()*P*v;
double jm = zh(0, 0);
double o = sqrt(jm/3);//单位权中误差
//创建文件并输出
QString filePath = QFileDialog::getSaveFileName(this, "Save As", "E:/output", tr("TXT(*.txt)"));
QByteArray mstr = filePath.toLocal8Bit();
std::string path = std::string(mstr);//将qstring(包含中文)转换为string
ofstream out_file(path);
if (out_file.is_open()) {
out_file << "单位权中误差为(mm):" << std::endl;
out_file << to_string(o) << std::endl;
out_file << "--------------------------------------------------------------------" << std::endl;
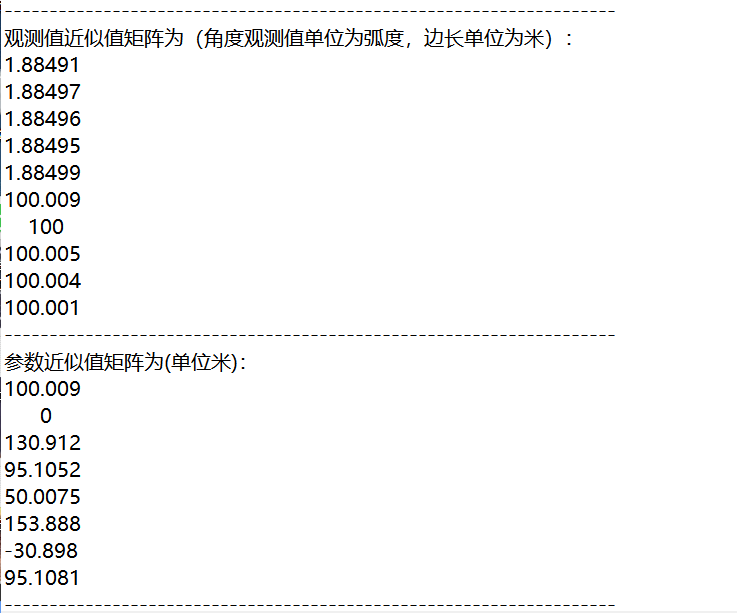
out_file << "观测值近似值矩阵为(角度观测值单位为弧度,边长单位为米):" << std::endl;
out_file << L << std::endl;
out_file << "--------------------------------------------------------------------" << std::endl;
out_file << "参数近似值矩阵为(单位米):" << std::endl;
out_file << X << std::endl;
out_file << "--------------------------------------------------------------------" << std::endl;
out_file << "B矩阵为:" << std::endl;
out_file << B << std::endl;
out_file << "--------------------------------------------------------------------" << std::endl;
out_file << "l矩阵为:" << std::endl;
out_file << l << std::endl;
out_file << "--------------------------------------------------------------------" << std::endl;
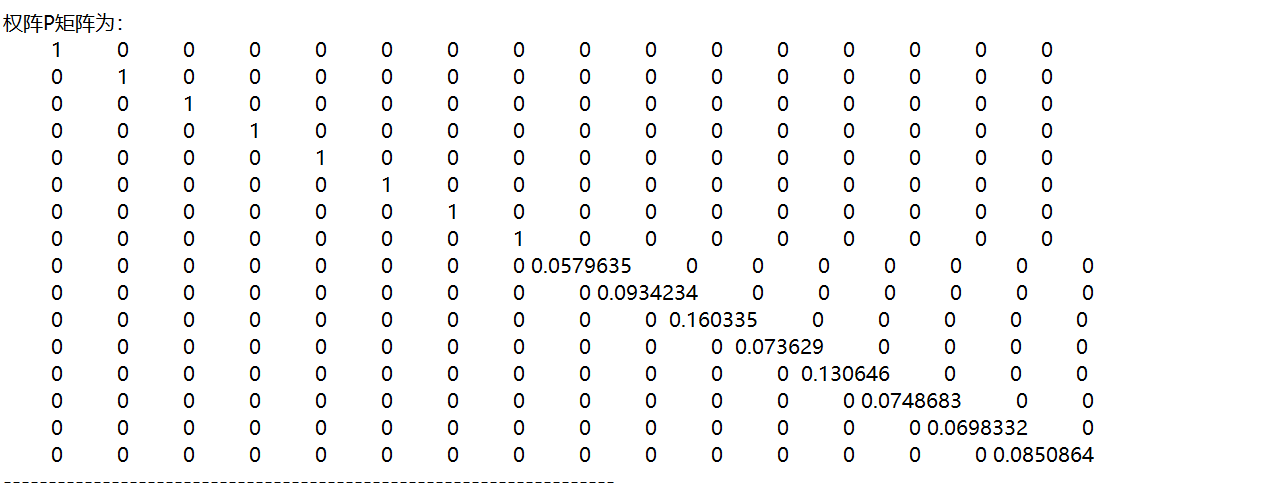
out_file << "权阵P矩阵为:" << std::endl;
out_file << P << std::endl;
out_file << "--------------------------------------------------------------------" << std::endl;
out_file << "x参数改正数矩阵矩阵为单位为mm:" << std::endl;
out_file << x << std::endl;
out_file << "--------------------------------------------------------------------" << std::endl;
out_file << "v观测值改正数矩阵(角度观测值单位为秒,边长单位为毫米)为:" << std::endl;
out_file << v << std::endl;
out_file << "--------------------------------------------------------------------" << std::endl;
for (i = 0; i < n; i++) {
L_(i, 0) = angle[i][0] + angle[i][1] / 60 + (angle[i][2] + v(i, 0)) / 3600;
}
for (i = n; i < 2*n; i++) {
L_(i, 0) = s[i-n]+v(i,0)/1000;
}
out_file << "改正后的观测阵矩阵为(角度观测值单位为度,边长单位为米):" << std::endl;
out_file << L_ << std::endl;
out_file << "--------------------------------------------------------------------" << std::endl;
X = X + x/1000;
out_file << "改正后的参数矩阵为:(单位m)" << std::endl;
out_file << X<< std::endl;
out_file << "--------------------------------------------------------------------" << std::endl;
out_file << "协因数阵QXX为:(单位mm)" << std::endl;
out_file << QXX << std::endl;
out_file << "--------------------------------------------------------------------" << std::endl;
out_file << "方差协方差阵DXX为:(单位mm)" << std::endl;
DXX = QXX * o;
out_file << DXX << std::endl;
out_file << "--------------------------------------------------------------------" << std::endl;
}
else {
QMessageBox::critical(this, "warning", "The outfile is not opened!"); return 0;
};
out_file.close();
return 0;
}
horizontal_control_network::~horizontal_control_network()
{
}附:
上述示例数据测量误差非常大,仅供运行。
下面的数据是我自己编的近似正五边形,可以代替示例
108,0,4
108,0,3
108,0,1
107,59,58
108,0,1
100.009
100
100.005
100.004
100
输出

















 3087
3087

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









