




目录
笔者注:这是【玩转倒立摆】专栏的第(一)篇文章,内容主体来源于笔者近期的学习与思考。受限于笔者的学识水平,文中必定存在诸多不足之处,望广大读者海涵。
文末将附上有前后衔接关系的相应文章链接,欢迎跳转查看。
0 写在前面:何为倒立摆?
倒立摆,顾名思义就是一座”摆“,实际上与人们所熟知的”单摆“”摆钟“别无二致,只不过自动控制领域所用到的”摆“通常还与一定的运动机构紧密相连,例如由丝杠带动的滑台/小车、由电机驱动的旋臂等。人们研究这座”摆“的目标就是要使它”倒立“起来并保持不动,甚至在受到一定干扰的情况下仍能自动恢复”倒立“的状态,而不再像平时一样下垂静止或来回晃荡。

直线倒立摆(图片来源于网络,侵删)
旋转倒立摆(图片来源于网络,侵删)
在自动控制领域的广大学者看来,玩倒立摆这种既考验控制性能(保持倒立)又考验抗扰能力(自动恢复),还涉及复杂动态(非线性建模)的活计,用来检验教科书和论文里各种各样的控制方法简直再合适不过了!于是乎,PID(比例-积分-微分)、LQR(线性二次调节器)、FC(模糊控制)等轮番上阵,倒立摆已然成为了控制理论神仙们各显神通的试炼场。与此同时,砖家叫兽老湿筒靴和广大卷王们纷纷表示"就这?“,似乎还远远不过瘾,于是便接连着弄出来了二阶倒立摆、三阶倒立摆……不过,对于低年级的入门自控小白而言,能比较全面、完整地掌握一阶倒立摆就已善莫大焉。私以为,即使是简单的模型和算法,只要能够自己亲手动手推推公式、写写代码、跑跑仿真,其对自己核心能力和知识素养的提升也远远大于成天只会copy复杂算法的开源程序和做一个资深“调参大师”的。这也是为何笔者愿意几乎(你总不能指望我从高中物理开始讲起吧)从零开始梳理倒立摆的有关知识、并将相应的MATLAB仿真源码设置为付费的主要原因。
好了,废话不多说,请广大读者尤其是刚入门的小白们准备好大脑和演草纸,开始见证你是如何操练倒立摆的十八般武艺的吧!
1 倒立摆的物理方程
以直线倒立摆为例,整个运动系统的模型实际上可以抽象为一根杆+一辆车,两者固接在一起,但杆可以无摩擦地自由转动,如图1所示。其中“杆”只是一个抽象的示意,实际上杆的末端可能还连有“摆锤”,杆本身的形状也未必规则。
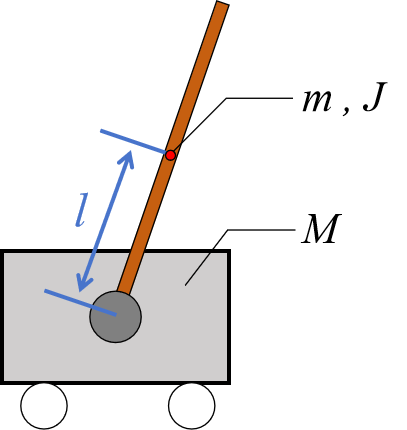
图1 倒立摆基本模型
1.1 基本参数与符号
倒立摆系统的物理参数会决定系统的动态情况。将杆和车的质量分别记为和
,同时杆的重心到连接处的长度记作
。由于杆绕连接点转动,故而还存在相应的转动惯量,记作
。
考虑到广大读者所掌握的专业知识不尽相同,接下来将以具备高中物理+少许大学物理水平就能掌握的经典牛顿力学方法开展运动分析。此外还有基于理论力学如拉格朗日方程的分析方法,本文不再赘述,感兴趣的读者可参阅如下链接:
1024Robot-倒立摆建模推导![]() https://mp.weixin.qq.com/s/2xOBDK9hAPYY6-5WDgwt-A
https://mp.weixin.qq.com/s/2xOBDK9hAPYY6-5WDgwt-A
在进行运动学分析时,以向右为正方向,将小车的位移(以右端界限参考)记为,将杆的水平位移(以重心为参考)记为
;以向上为正方向,将杆的竖直位移记作
。为使今后的倒立摆控制问题成为点镇定问题(将所有状态量调节到0),本文选取摆杆与竖直向上射线之间的夹角作为摆角
,并以顺时针为正方向。注意,夹角0°位置的选取十分重要,0°位置的不同将影响最终推出的运动方程。
在进行动力学分析时,向右为正方向,记人为施加的外界作用力为。为简便分析,将小车所受的所有摩擦均抽象为一个与速度成正比的“阻尼力”,阻尼系数为
;也就是说,系统受到的总摩擦用
来刻画。此外,将小车推动杆、杆反作用于小车的两个相互作用力分别分解到水平和竖直方向上,并分别记为
和
,如图2所示。
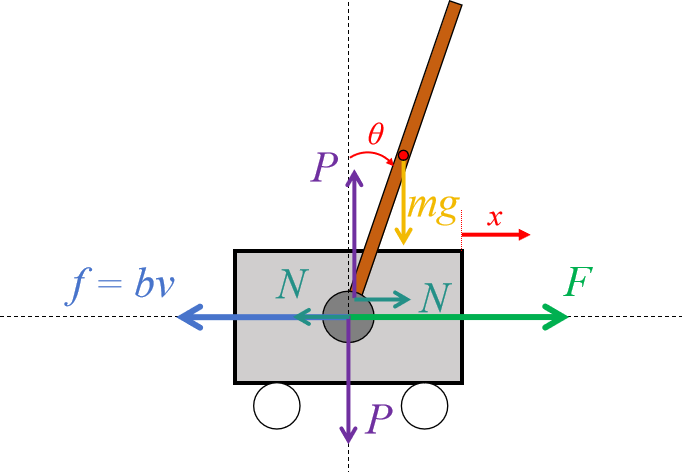
图2 倒立摆受力分析示意图
1.2 物理方程的推导
首先,对小车的受力情况进行分析。由于小车只在水平方向运动,竖直方向上存在可以抵消一切其他的竖直受力的支持力。因此,依据牛顿第二定律可以很容易地写出水平方向上小车动力学方程:
. (1)
其次,分析摆杆的受力情况。在小车的推动下,在瞬时内,可认为杆绕其质心发生转动,同时摆杆整体还叠加了平移运动。先考虑转动,取力和
分别在杆垂直的方向上的分量
、
,其作用点到转动轴心的距离恰好为
,则可得出力矩与转动角加速度的关系(注意顺时针转动的方向为正)为
. (2)
再分析杆的平动,可知叠加发生的平动包含水平、竖直两个方向,其动力学关系为
. (3)
由于杆与车是固连的,几何规则限制了杆的平动位移与转动角度之间的定量关系,即小车的质心永远被限制在以为半径的圆上。此外,由于杆的转动是相对于小车参考系而言的,因此从大地参考系来看,其实际平动位移还应加上小车的位移。综上有
. (4)
将(4)代入(3)消去和
,再将结果依次代入(1)(2)消去中间作用力
和
,就可以得到仅包含小车位移
及其导数、摆杆摆角
及其导数的动态物理方程。需要注意的是,(4)代入(3)时需要对时间求导,此时应牢记并正确使用复合函数的求导法则,许多人正是在求导这一步上计算出错,导致推出的模型与正确模型相去甚远。(4)式求二阶导后的结果应为:
. (5)
受篇幅所限,这里直接给出最终的倒立摆动态(微分)物理方程:
. (6)
2 状态空间模型的建立
关于状态空间(State Space)的基本知识,请读者自行参阅相关的自动控制原理教科书。对于(6)式所示的物理方程,很容易可以想到用位移、速度、角度、角速度来作为状态空间中的状态变量(State Variables),即
.
由于状态空间表达式遵循“导数在左、状态在右”的原则,因此需要通过代换消元将(6)式中的和
单独分离出来放在等式左边,得到如下所示的非线性状态空间表达式:
, (7)
其中
. (8)
方程(7)精确地描述了一阶倒立摆系统的运动情况,只要初始条件确定、外力(控制)作用
已知,则借助数值计算方法(如改进欧拉法、龙格-库塔法等)就可较精确地描绘出系统运行过程的细节。然而,在实际设计控制律时,(7)式很少会被直接使用,而通常采用其线性化后的“简化版本“,这也是下一节将要重点阐述的内容。
3 系统模型的线性化(重点)
在(7)中,大量的三角函数使得整个系统变得十分复杂,直接对这样的非线性系统进行控制是比较困难的。因此,人们通常只在一定范围内(不超过±30°)对倒立摆施加平衡控制作用。在此范围内,三角函数可以被较好地线性近似,使得系统的复杂度大大降低,进而让设计者能够使用人们所熟知的PID、LQR等线性系统方法进行控制。
3.1 线性化的条件与方法
在进行系统的线性化之前,首先需要明确系统的工作点(Operating Point),并在工作点附近进行线性化。这个过程就类似于在二维曲线上某点处作切线、在三维曲面某点上作切平面。显然,如果系统运行的状态偏离事先选取的”工作点“越远,那么线性模型所描述的精度也就越差。因此,模型线性化的首要条件就是系统必须运行在所选取的工作点附近。至于”附近“究竟是多大的范围,就需要具体问题具体分析了。对于本文所建立的倒立摆系统而言,由于控制方式是进行点镇定,因此选取为工作点(若采用了其他的建模方法,则工作点的选取可能会不同)。此时
范围内的线性效果通常都是可以接受的;而如果追求更高的精度,则一般取
为宜。
在确定好系统工作点和可行范围之后,就可以对非线性的系统模型进行线性化操作。最通用的方法是将非线性函数在工作点附近进行Taylor展开,并略去二阶及以上的项:
,
其中是Jacobian矩阵:
.
不过,对于本文中的倒立摆系统(7)而言,线性化操作实际上并不需要这么麻烦。将时存在的近似关系:
. (9)
代入前面推导出的物理方程(6)中,就可以得到线性化后的物理方程
. (10)
此时的系统就是一个线性时不变(LTI)系统,可以进一步转换成传递函数、状态空间等形式,从而直接使用Routh-Hurwitz判据、根轨迹法、Nyquist判据、Bode图、Luenberger观测器、全状态反馈极点配置等传统方法加以分析和控制。
3.2 倒立摆的线性状态空间模型
传递函数模型将在后续关于PID及其改进型控制器的文章中详细讨论,本文先给出(10)式的线性状态空间表达式:
, (11)
此外,若系统具有位移传感器和角度编码器,则系统输出可表示为
, (12)
式(11)和(12)共同构成了用状态空间表示的完整LTI系统,这将是后续使用多种控制方法来“玩转”倒立摆的基础。
参考文献
[1] 胡寿松, 自动控制原理(第五版)[M].科学出版社,2007.
[2] 黄孝平, 基于遗传神经网络的倒立摆控制研究[M].重庆大学出版社,2014.
[3] Richard C. Dorf , Robert H. Bishop. Modern Control Systems (Eleventh Edition) [M]. 电子工业出版社, 2009.
-- 友情链接 --
下一篇:【玩转倒立摆】(二)一阶倒立摆之 - 基于全状态反馈的极点配置方案
-- 内容预告 --
-- 更新中 --
- 【玩转倒立摆】系列
【玩转倒立摆】(三)一阶倒立摆之 - 状态观测器与嵌入式实现 - 【状态空间漫游记】系列
【状态空间漫游记】(一)卡尔曼滤波 (Kalman Filter) 算法的基本原理与代码实现
-- 筹备中 --
- 【玩转机械臂】系列
【玩转机械臂】(一)坐标变换与DH参数基础
【玩转机械臂】(二)机械臂的正、逆运动学 - 【玩转倒立摆】系列
【玩转倒立摆】(四)一阶倒立摆之 - 模型预测控制方案
【玩转倒立摆】(五)一阶倒立摆之 - 模糊控制方案
【玩转倒立摆】(六)一阶倒立摆之 - 神经网络控制方案 - 【状态空间漫游记】系列
【状态空间漫游记】(二)初探自适应:模型参考&自校正控制导论 - 【玩转无人机】系列

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









