




 本文探讨了多目标跟踪(MOT)中的两个关键评价指标——MOTA和IDF1。MOTA侧重检测器性能和减少漏检及ID交换,而IDF1更关注跟踪器的稳定性,强调初始轨迹ID的一致性。理解这两个指标对于优化跟踪算法至关重要。结合两者可以提供更全面的分析视角。
本文探讨了多目标跟踪(MOT)中的两个关键评价指标——MOTA和IDF1。MOTA侧重检测器性能和减少漏检及ID交换,而IDF1更关注跟踪器的稳定性,强调初始轨迹ID的一致性。理解这两个指标对于优化跟踪算法至关重要。结合两者可以提供更全面的分析视角。
之前在csdn上发了一个多目标跟踪指标的“中文翻译”的思维导图,后面很多人不经同意直接转载和消除水印,但是后面过了两年之后,发现在转载的一些平台发现当初翻译和理解的有些问题,但是后面也懒得改了,也感谢指正问题的朋友,这样才有进步的空间,后续有机会会重新编辑下当年的思维导图;【MOT评价指标】MOTA MOTAL MOTP Rcll IDF1 MT ML FP FN ID_SW Frag Hz_ronales的博客-优快云博客_idf1
今天想聊下多目标跟踪的两个综合指标,之前看IDF1看的云里雾里。专门画了个图,也感谢楼下作者文章的启发;如有问题,欢迎交流:MOT Metrics—MOTA vs IDF1?_dyhBUPT的博客-优快云博客_idf1
总结:
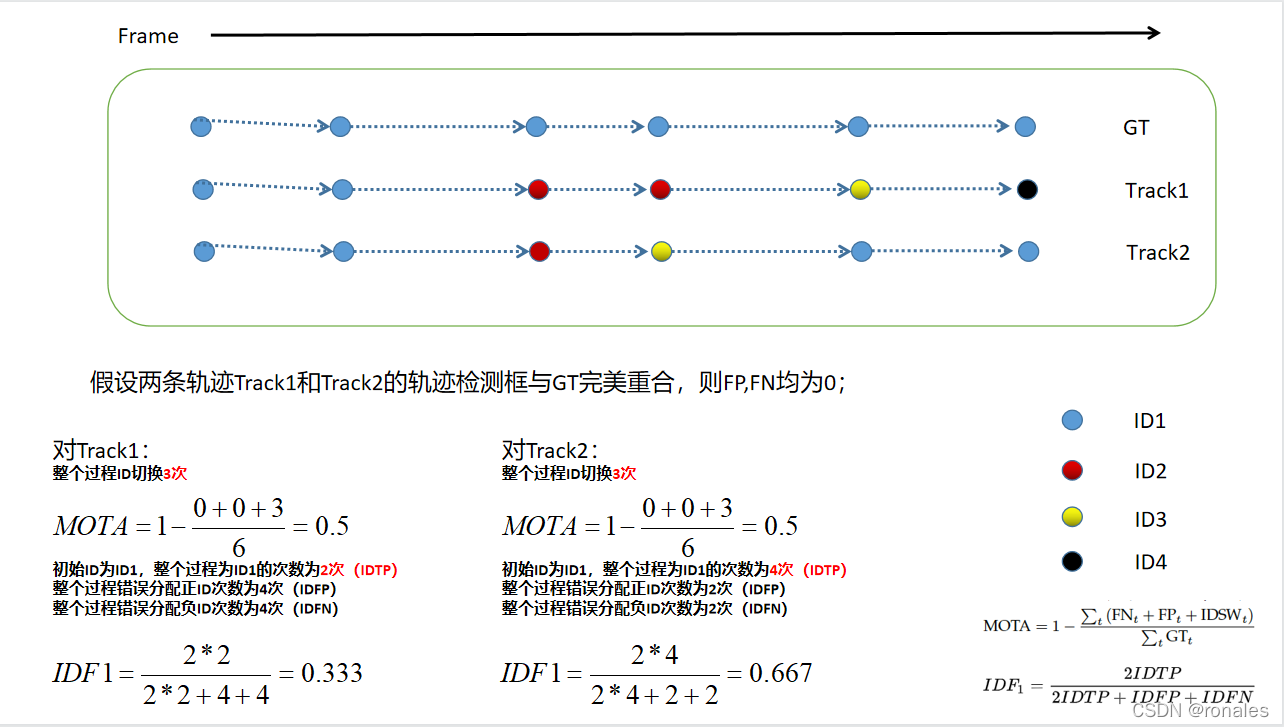
从上图看:
1、MOTA更关注你检测器的性能,如果检测器和FN足够好,且你IDSw的次数足够小,MOTA的值就会比较高
2、IDF1由于引入ID信息,会更关注你跟踪器最初创建轨迹的ID是否能够"从一而终",如果ID切换过早。在IDSw次数相同的情况下。最终的轨迹ID肯定与你最初创建的轨迹ID相去甚远。这样就背离了跟踪的目的。
两个指标综合的看可能更具有数据分析性。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









