







 本文介绍了图像处理中世界坐标系、相机坐标系、图像坐标系和像素坐标系之间的转换关系。从世界坐标系到相机坐标系涉及旋转和平移,通过旋转矩阵和偏移矩阵实现。接着,从相机坐标系到图像坐标系为透视投影,再到像素坐标系则需考虑物理单位到像素单位的转换。最后,通过相机内参和外参完成完整转换。
本文介绍了图像处理中世界坐标系、相机坐标系、图像坐标系和像素坐标系之间的转换关系。从世界坐标系到相机坐标系涉及旋转和平移,通过旋转矩阵和偏移矩阵实现。接着,从相机坐标系到图像坐标系为透视投影,再到像素坐标系则需考虑物理单位到像素单位的转换。最后,通过相机内参和外参完成完整转换。
一、各坐标系介绍
图像处理、立体视觉经常涉及到世界坐标系、相机坐标系、图像坐标系和像素坐标系。
如下图所示:
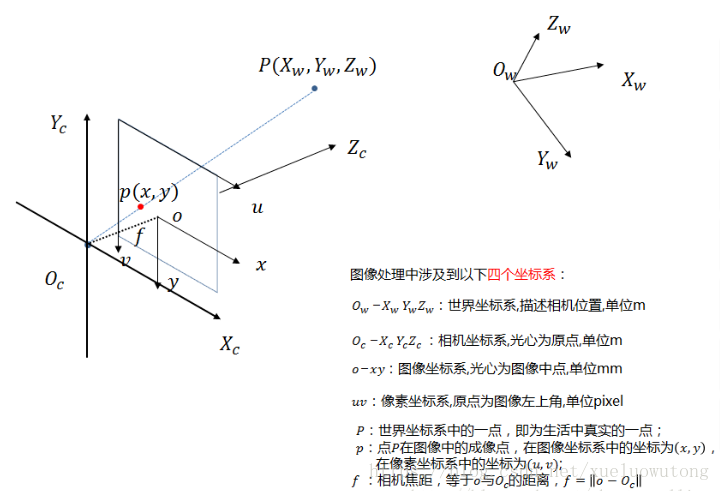
世界坐标系是为了确定相机的位置,在双目视觉中一般将世界坐标系原点定在左相机、右相机
或两者X轴方向的中点。
下面是各坐标系之间的装换,换而言之,就是一个现实中的物体是如何在图像中成像的。
二、世界坐标系和相机坐标系之间的转换
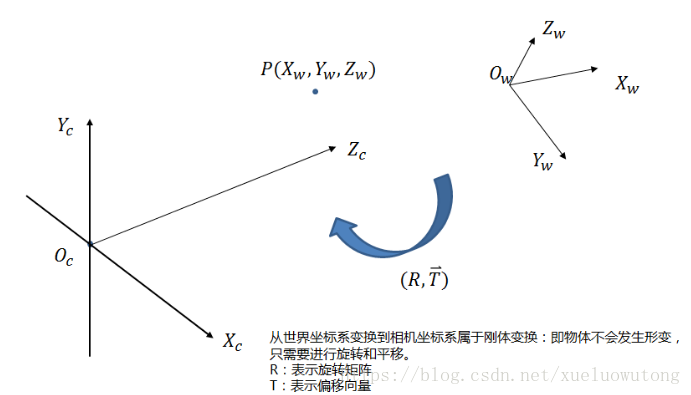
从世界坐标系到相机坐标系,设计到物体的旋转和平移。绕着不同的坐标轴旋转不同的角度,
得到相应的旋转矩阵。如下图所示:
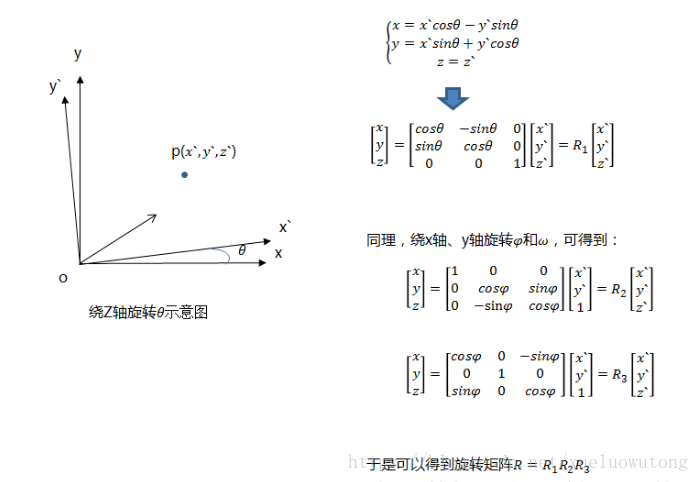
那么从世界坐标系到相机坐标系的转换关系如下所示:
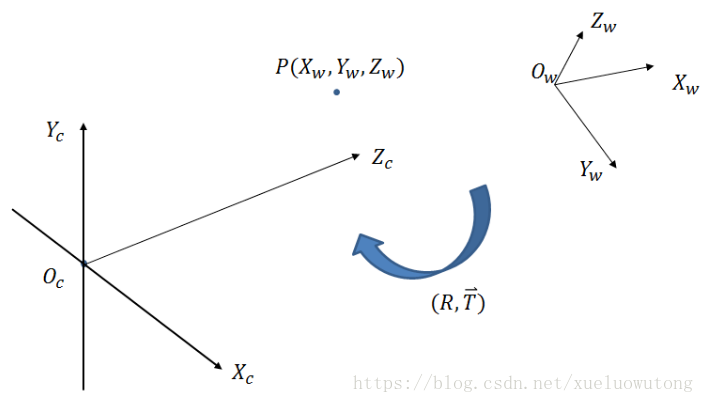
可以得到P点在相机坐标系中的坐标:
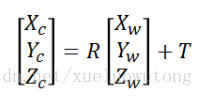 其中T为偏移矩阵
其中T为偏移矩阵
三、相机坐标系和图像坐标系之间的转换
从相机坐标系到图像坐标系,是从3D转换到2D,属于透视投影关系
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 3253
3253

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









