



调整 move_base 参数的方法
move_base 是 ROS 中用于实现机器人导航的核心功能包,其性能高度依赖参数配置。通过调整参数可以优化路径规划、避障和全局/局部代价地图的行为。
获取默认参数文件 move_base 的默认参数通常存储在 move_base_params.yaml、costmap_common_params.yaml、global_costmap_params.yaml 和 local_costmap_params.yaml 中。这些文件位于 ROS 功能包的 config 目录。
# move_base_params.yaml 示例
controller_frequency: 5.0
planner_patience: 5.0
关键参数分类与调整
全局路径规划器(Global Planner) base_global_planner 参数指定全局规划器(如 navfn/NavfnROS 或 global_planner/GlobalPlanner)。调整 tolerance 可设置目标点的位置容差:
NavfnROS:
default_tolerance: 0.2
局部路径规划器(Local Planner) base_local_planner 参数通常设置为 dwa_local_planner/DWAPlannerROS。调整速度限制和避障参数:
DWAPlannerROS:
max_vel_x: 0.5
acc_lim_x: 0.2
path_distance_bias: 0.6
代价地图参数优化
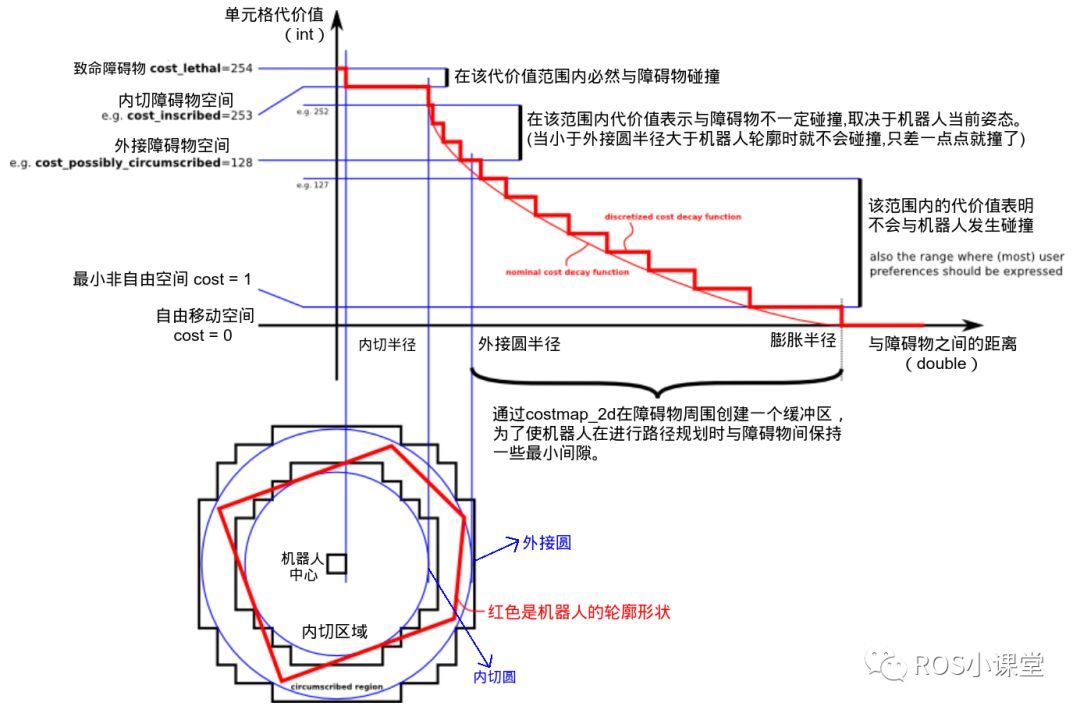
全局代价地图(Global Costmap) 设置 inflation_radius 控制障碍物膨胀范围,static_layer 管理静态地图:
global_costmap:
inflation_radius: 0.3#单位米
static_map: true
膨胀半径详解
局部代价地图(Local Costmap) 调整 update_frequency 和 obstacle_range 以平衡实时性与计算开销:
local_costmap:
update_frequency: 5.0
obstacle_range: 2.5
参数动态重配置
使用 dynamic_reconfigure 工具在运行时调整参数:
rosrun rqt_reconfigure rqt_reconfigure
或通过代码动态修改:
import dynamic_reconfigure.client
client = dynamic_reconfigure.client.Client("/move_base/DWAPlannerROS")
client.update_configuration({"max_vel_x": 0.3})
调试与验证方法
通过 RViz 可视化代价地图和路径规划结果。监控 /move_base/status 主题获取导航状态信息。使用 rostopic echo 检查参数是否生效:
rostopic echo /move_base/global_costmap/inflation_layer/parameter_updates
注意事项 修改参数后需重启节点或调用服务 clear_costmaps。参数调整需结合机器人物理特性和环境特点进行实测验证。建议采用增量式调整策略,每次仅修改少量参数并记录性能变化。
参考:https://blog.youkuaiyun.com/JDWell/article/details/88359098

















 2899
2899

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









