



 本文详细介绍了无位置传感器控制永磁同步电机(PMSM)的一种算法,该算法基于γ-δ轴的估计,通过计算反向电动势来估算转子位置。文章首先阐述了γ-δ轴与d-q轴的关系,然后推导出在γ-δ轴上进行park变换的等式,并说明如何通过PI控制器估算eγ和eδ,从而求得转子位置误差θerr。最后,讨论了PI控制器参数设定方法及速度估计过程,提供了一种实现无传感器控制的框架。
本文详细介绍了无位置传感器控制永磁同步电机(PMSM)的一种算法,该算法基于γ-δ轴的估计,通过计算反向电动势来估算转子位置。文章首先阐述了γ-δ轴与d-q轴的关系,然后推导出在γ-δ轴上进行park变换的等式,并说明如何通过PI控制器估算eγ和eδ,从而求得转子位置误差θerr。最后,讨论了PI控制器参数设定方法及速度估计过程,提供了一种实现无传感器控制的框架。
-------------------------------------------------------------------------
申明:本文转载,纯属个人收藏,如若侵权立删
原地址:http://blog.sina.com.cn/s/blog_9b025dc00102wq5e.html
--------------------------------------------------------------------------
本文主要参考了NXP(Freescale)的一些技术文档,如果有误,还望指正。
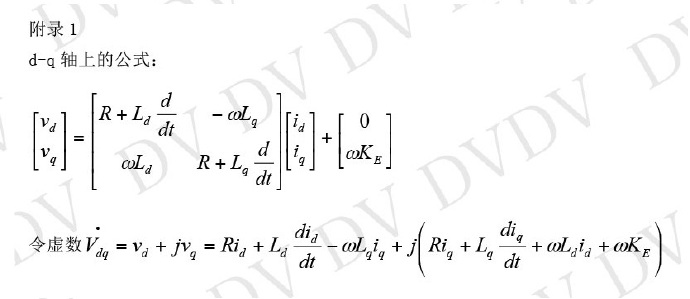
有效控制永磁同步电机就需要转子的位置信息,除了在电机上安装位置传感器外,还可以通过算法估算出位置。现在有很多论文是关于这方面研究的,大都是基于反向电动势,下面是一个基于γ-δ(d-q)轴的估计方法。各个轴之间的关系如下:
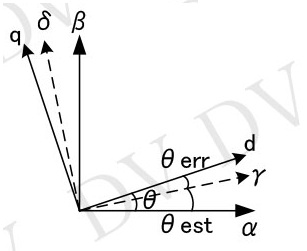
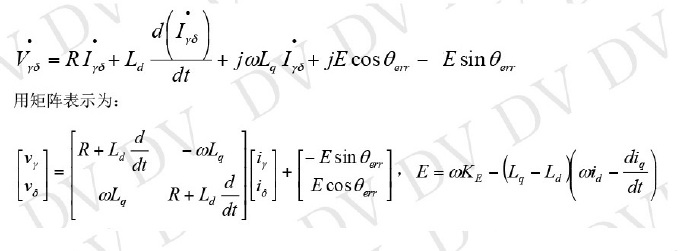
其中γ-δ轴是d-q轴的一个估计,它与α-β轴之间的角度为θest (或者说θest是一个假定值),并假设它与d-q之间有θerr的误差。如果我们在估计(假定)出来的γ-δ轴上进行park变换的话,可以得到下列等式(推导在附录1中)。
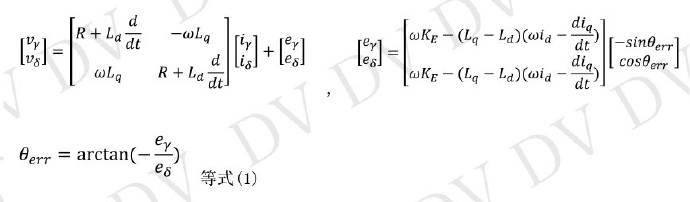
我们可以看到当θerr为零时,上述等式(1)就相当于d-q轴上的等式。既然θest是一个已知值(预估或者假定),如果可以求出θerr,那就意味着估计出了转子的位置θ。因此为了实现无位置传感器控制,只要将等式(1)中的eγ和eδ估计出来就行了。但是反向电动势是无法直接测得的,只能通过计算式估算得到。
为了实现在微处理器的运算,将上述连续等式(1)表示为如下离散等式(2):
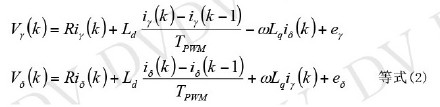
其实等式(2)中的大部分参数是可以是已知的,电机参数R、L一般已知(可以事前测量得到),Vγ、Vδ是电流控制环PI控制器的输出必然是已知量,使用θest将检测到的三相电流在γ-δ轴上进行park变换后即得iγ、iδ值,此外转速ω是位置θ的导数,所以可以通过上式求得eγ和eδ,然后求出γ-δ轴和d-q轴的误差θerr。当然可以按照上述方式将eγ和eδ计算出来,也可以用下面的方法通过PI控制器求出eγ和eδ。
现将等式(2)变换一下,可以得到:

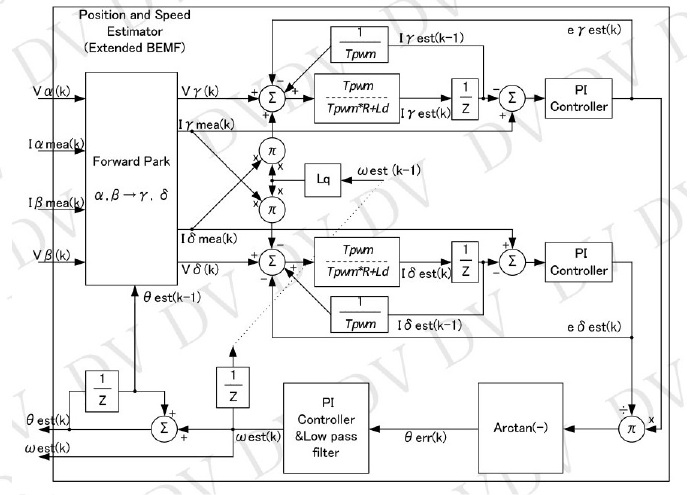
其中后缀est代表估计值(estimated),mea代表实际值(measured,实际测得的三相电流后经过park(γ-δ)变换后的值)。我们不直接求解eγ和eδ,而是用它们的估计值eγest(k)和eδest(k)计算iγest(k)和iδest (k),如果这两个电流值和iγmea(k),iδmea (k) (三相电流实际值经过park变换后的值)一致的话,eγest(k)和eδest(k)就是真值。iγest(k),iδest (k)和 iγmea(k),iδmea (k)的比较由PI控制器完成。PI控制器的kp、ki可以和电流控制环的PI参数相同。估算eγest(k)和eδest(k)后,就可以使用反三角函数求得θerr(k)。其实这里求出的是θ的一个差值,即上述计算实现的就是差分运算,我们可以用另一个PI控制器来调节这个差分值,使其为零,而且PI控制器的输出为转速的估计值ωest。换一句话,就是当θerr为正,γ-δ轴滞后于d-q轴时, PI控制器会将转速ωest加快,反之亦然。当然在PI控制器后面,我们还可以加入低通滤波器(移动平均FIR,一阶IIR等)使得转速ωest更平滑。框图如下(Σ为加法运算,Π为乘法运算):
下面是转速计算中使用的PI控制器的参数设定方法,为了简单起见,用连续拉普拉斯变换代替离散的Z变换。基本结构如下:
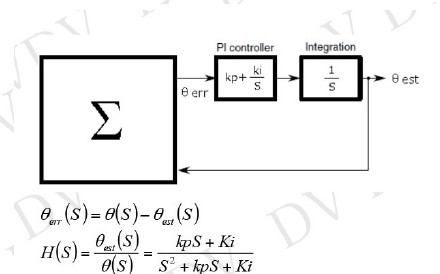
显然传递函数H(S)类似于二阶滤波器,将分母多项式和二阶滤波器的分母
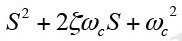
比较后,可以得到下面等式。

其中

是系统的阻尼比率(damping ratio),通常取1左右,

是截止频率,根据需要的响应速度进行设定。角度的变化率最大是在电机转速最大时出现,所以可以根据电机的最大转速来设定这个值,只要系统能跟上这个转速即可,不必设很大的值。
因为整个系统中要设定很多PI控制器(电流环,速度或者力矩环,位置估算器等),所以开发初期使用带传感器进行调试的话,相对简单。
另外,上述方法是基于反向电动势的,在速度为零或者很小时,因为没有反向电动势或者太小,所以无法用上述方法。可以用别的方法进行估算,比如High-Frequency Injection。


















 7564
7564

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









