



1、简介
本设计采用AT89C51作为核心部件进行逻辑控制及信号产生的单片机技术和C语言编程设计的步进电机控制系统,本控制系统采用单片机控制,通过人为按动开关实现2路步进电机的正反转、加速、减速、启停、切换电机。具有灵活方便、适用范围广的特点,基本能够满足实践需求。
2、主要功能
支持按键设置正转、反转、启停、加速、减速、切换电机。
支持LCD1602显示电机速度、正反转。
支持L298N驱动2个步进电机转动。
3、环境搭建
编译平台:Keil C51
编程语言:C语言
仿真版本:Proteus8.6 +
4、源程序
使用keil C51软件(内附安装包)实现程序编写与编译。
#include "LCD1602.h"
#define LCD1602_PORT P0
//****************************************************
//MS延时函数(12M晶振下测试)
//****************************************************
void LCD1602_delay_ms(unsigned int n)
{
unsigned int i,j;
for(i=0;i<n;i++)
for(j=0;j<123;j++);
}
//****************************************************
//写指令
//****************************************************
void LCD1602_write_com(unsigned char com)
{
LCD1602_RS = 0;
LCD1602_delay_ms(1);
LCD1602_EN = 1;
LCD1602_PORT = com;
LCD1602_delay_ms(1);
LCD1602_EN = 0;
}
//****************************************************
//写数据
//****************************************************
void LCD1602_write_data(unsigned char dat)
{
LCD1602_RS = 1;
LCD1602_delay_ms(1);
LCD1602_PORT = dat;
LCD1602_EN = 1;
LCD1602_delay_ms(1);
LCD1602_EN = 0;
}
//****************************************************
//连续写字符
//****************************************************
void LCD1602_write_word(unsigned char *s)
{
while(*s>0)
{
LCD1602_write_data(*s);
s++;
}
}
void Init_LCD1602()
{
LCD1602_EN = 0;
LCD1602_RW = 0; //设置为写状态
LCD1602_write_com(0x38); //显示模式设定
LCD1602_write_com(0x0c); //开关显示、光标有无设置、光标闪烁设置
LCD1602_write_com(0x06); //写一个字符后指针加一
LCD1602_write_com(0x01); //清屏指令
}
void LCD1602_Clear(void)
{
LCD1602_write_com(0x01);
LCD1602_write_com(0x02);
}
void LCD1602_Location(unsigned char y,unsigned char x)
{
if(y == 1)
LCD1602_write_com(0x80 + x);
if(y == 2)
LCD1602_write_com(0x80 + 0x40 + x);
}
void LCD1602_Write_Num(unsigned int num)
{
if(num >= 100 && num < 1000)
{
LCD1602_write_data(num/100 + 0X30);
LCD1602_write_data(num%100/10 + 0X30);
LCD1602_write_data(num%10 + 0X30);
LCD1602_write_word(" ");
}
if(num >= 10 && num < 100)
{
LCD1602_write_data(num/10 + 0X30);
LCD1602_write_data(num%10 + 0X30);
LCD1602_write_word(" ");
LCD1602_write_word(" ");
}
if(num < 10)
{
LCD1602_write_data(num + 0X30);
LCD1602_write_word(" ");
LCD1602_write_word(" ");
}
}
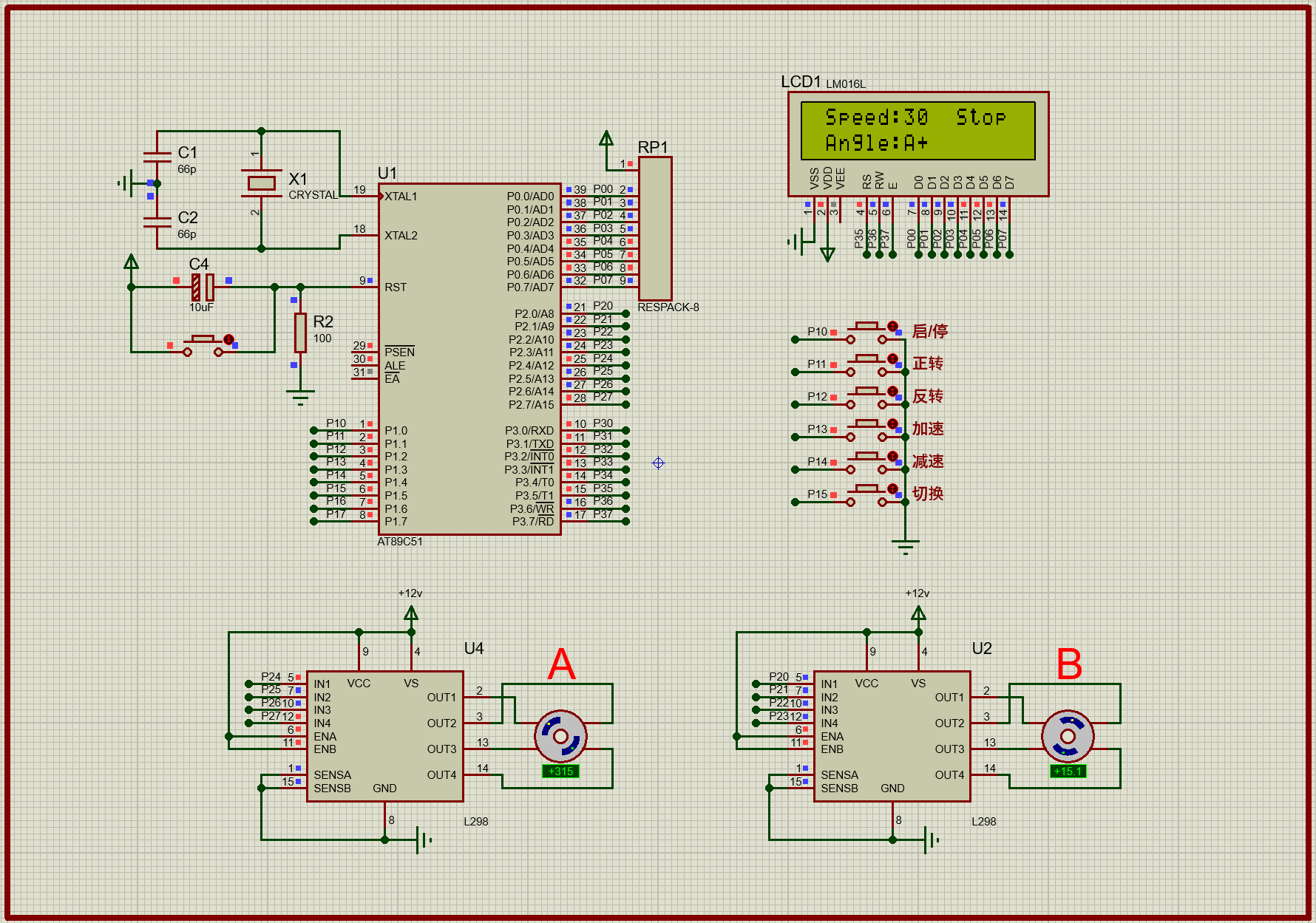
5、proteus8.6仿真
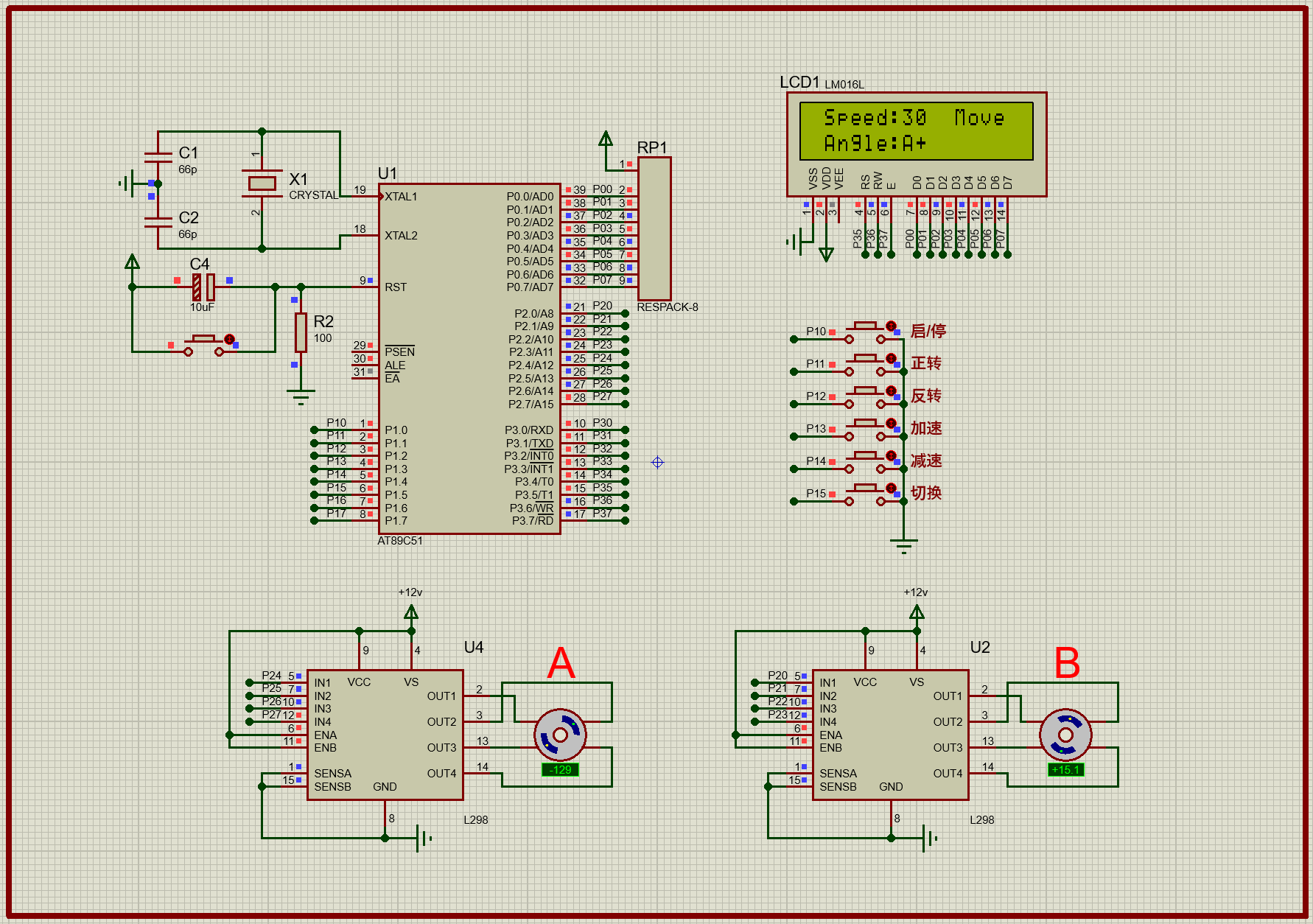
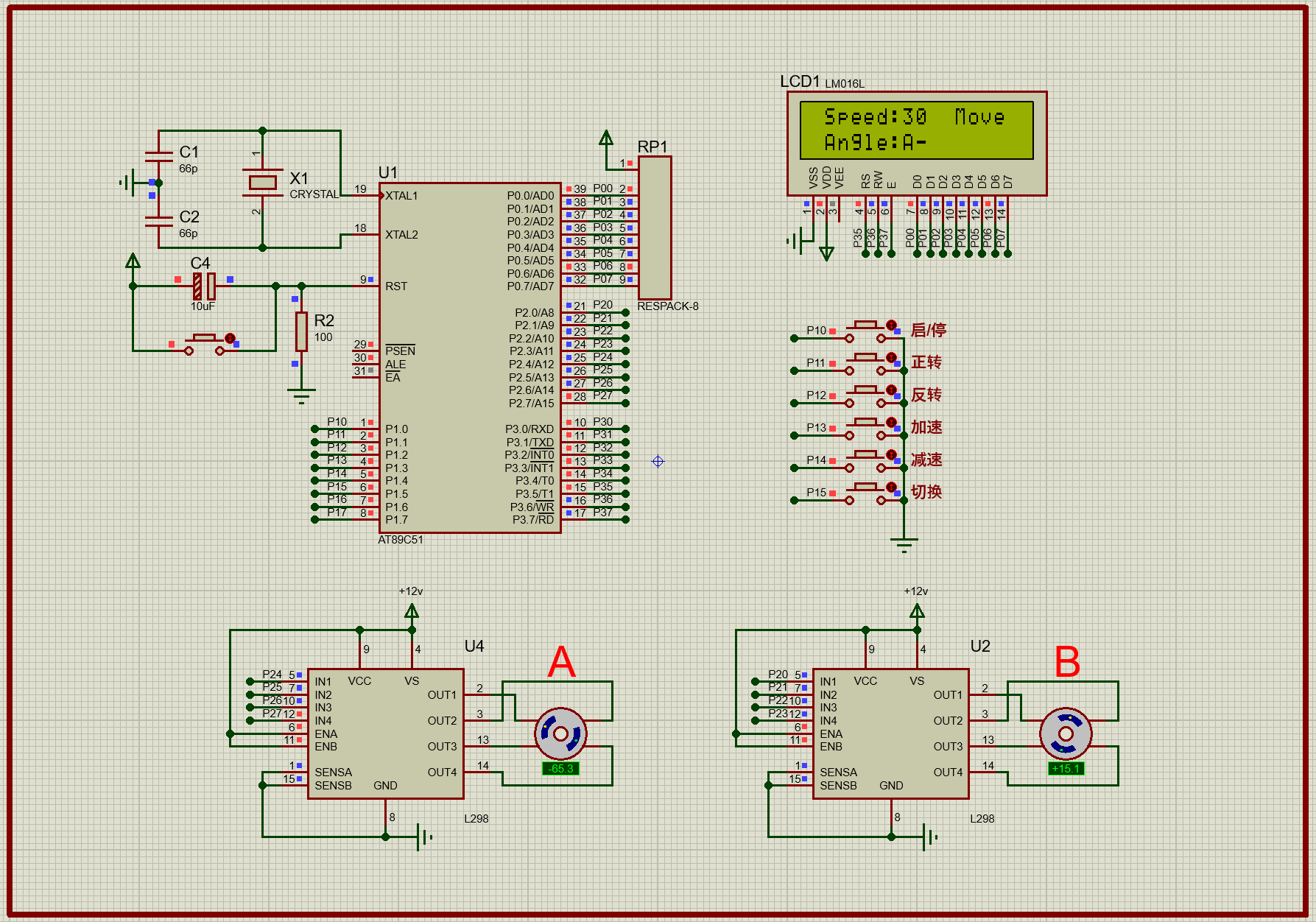
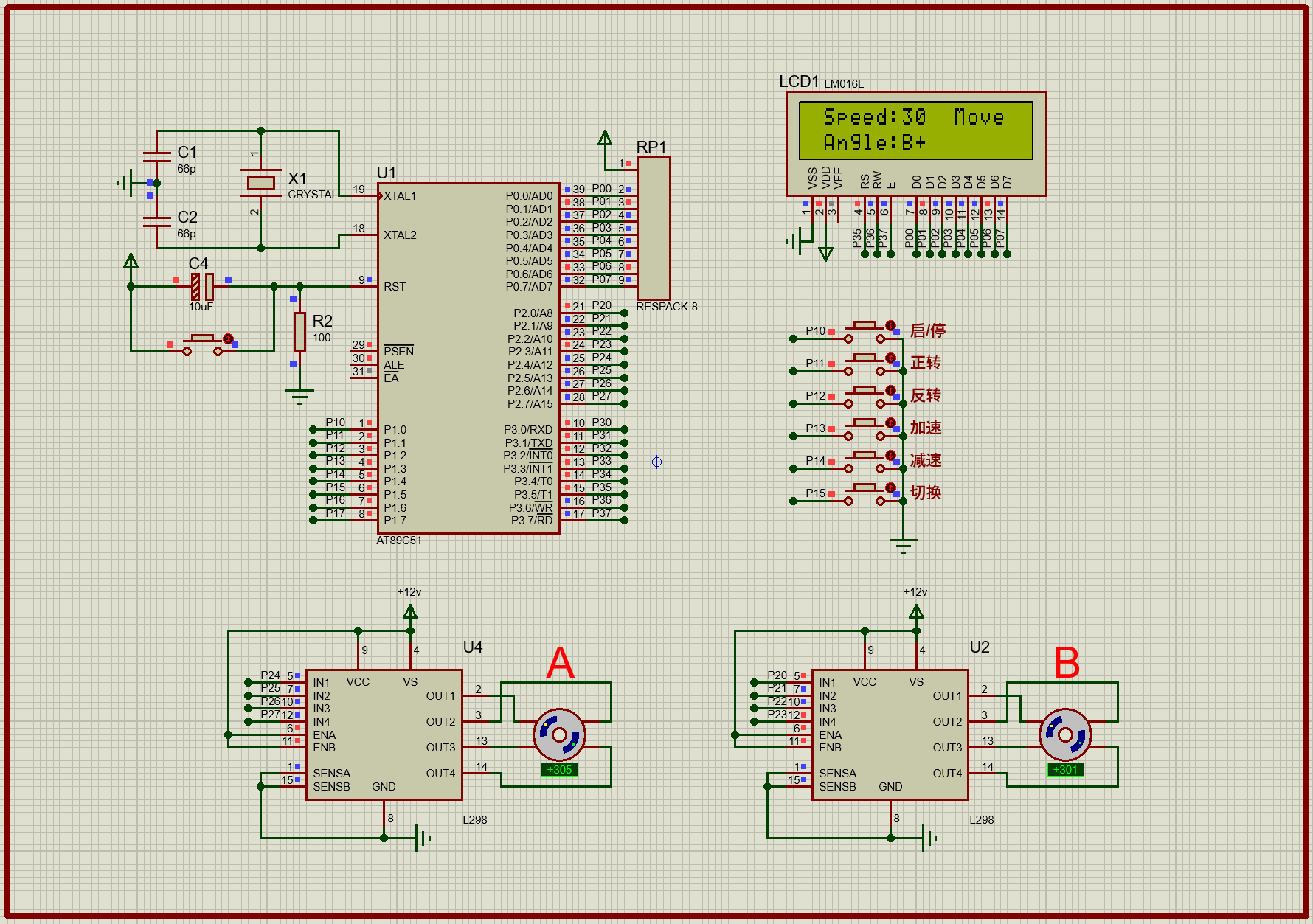
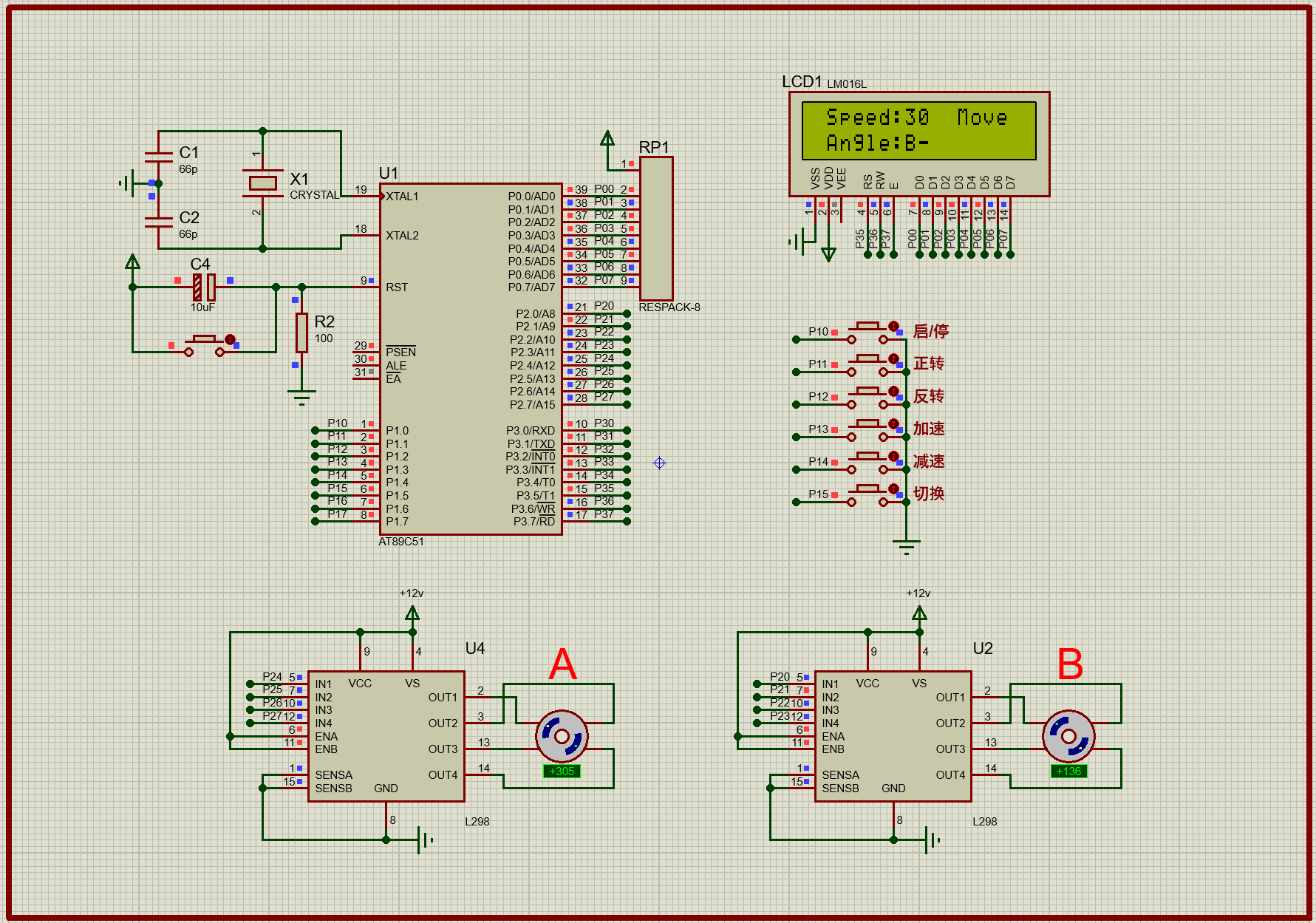
采用proteus8.6软件(内附安装包)实现仿真设计,如下图所示。proteus软件一般存在高低版本兼容问题,该仿真是通过proteus8.6导出的,所以请尽量使用proteus8.6打开文件,低于proteus8.6的版本不能够正常使用,高于proteus8.6的版本除了proteus8.8/8.9理论上可以正常使用。
(1)A正转:
(2)A反转:
(3)B正转:
(4)B反转:
(5)停止:
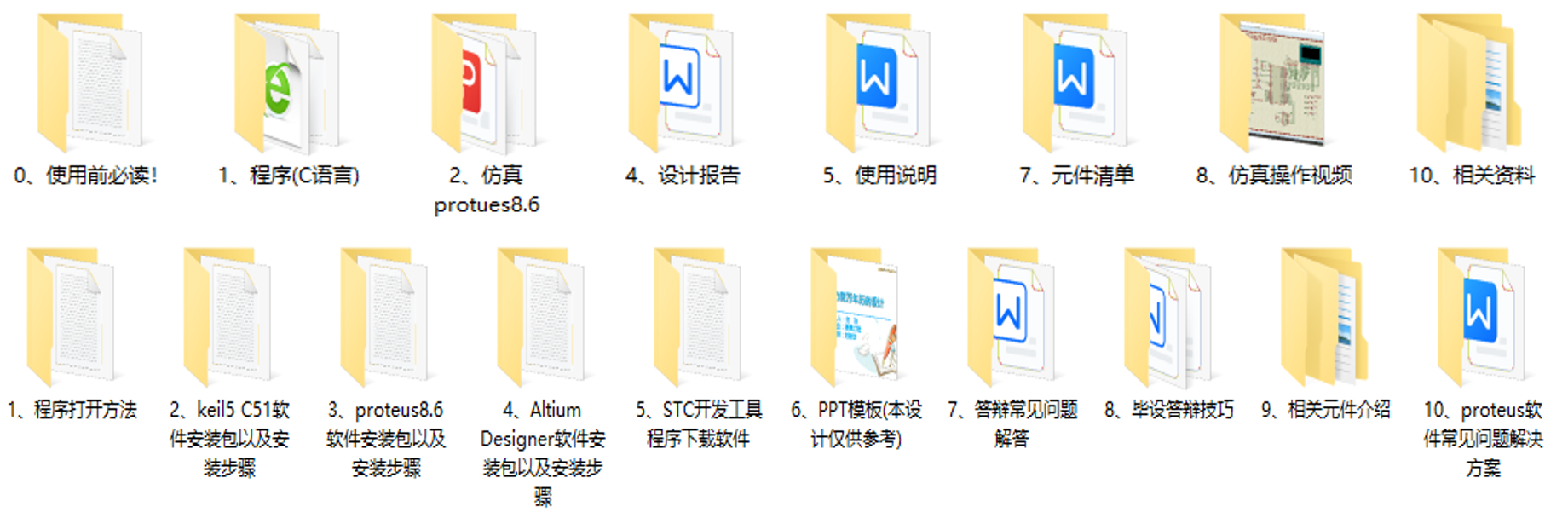
6、设计资料清单
设计资料主要包括C程序+仿真+设计报告+使用说明+元件清单+操作视频等,设计报告主要包括硬件电路、软件设计、仿真调试等等,仅供参考。由于不定期更新,最新的资料包不一定与下面图片完全一致,但主要资料都有。
7、获取方式
百度网盘链接:
https://pan.baidu.com/s/1IyJTaYinLW_n7dqJ4NdLDQ?pwd=gct5
有偿获取,非诚勿扰🙏


















 9614
9614

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









