




因为项目需要,需要通过无人机视频的中的目标位置计算实际的地理坐标位置,一下是计算的方法记录。
1、坐标系定义:
像素坐标系:单位pixel,相机的成像平面,原点在图像的左上方,u轴向右,v轴向下,像素坐标系的单位是像素(pixel),也就是分辨率。
图像坐标系:单位mm,和像素坐标系在同一个平面上,原点是相机光轴与成像平面的交点,通常情况下是成像平面的中点或者叫principal point。单位为物理单位。
机体坐标系:单位m,是以载机位置为原点建立的直角坐标系,X轴指向机头方向,Z轴指向载机垂直向下。即带姿态。
地理坐标系:单位m,以载机位置为原点建立的NED北东地坐标系
大地直角坐标系:单位m,根据参考椭球面建立的笛卡尔直角坐标系,原点为参考椭球面的中心点,Z轴由原点指向地球北极; X轴由原点指向本初子午圈与赤道圈在椭球面上的交点;
WGS84坐标系:与大地直角坐标系一样,只是采用纬度(M)、经度(L)和大地高(H)表示空间中任一点位置。
相机坐标系:单位m,原点是光心,x和y轴与像素坐标系u轴和v轴平行,z轴为相机的光轴。光心到像素平面的距离为焦距f。相机坐标系上的点和成像平面坐标系上的点存在透视投影关系
2、像素坐标系 转 图像坐标系
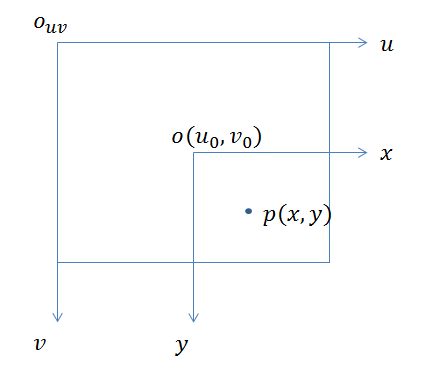
从无人机所拍摄的视频图片的像素坐标系转图片坐标系
(u,v) 目标点的像素坐标系中的坐标
(u0,v0) 像素坐标系的中心点<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2073
2073

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









