







Fast-Poly: A Fast Polyhedral Framework For 3D Multi-Object Tracking
paper :https://arxiv.org/pdf/2403.13443
code:https://github.com/lixiaoyu2000/FastPoly
MOT 任务排行榜:nuScenes tracking task
MOT 任务排行榜:kitti tracking
paperwithcode 网站 3D MOT 任务排行榜:3D Multi-Object Tracking
摘要
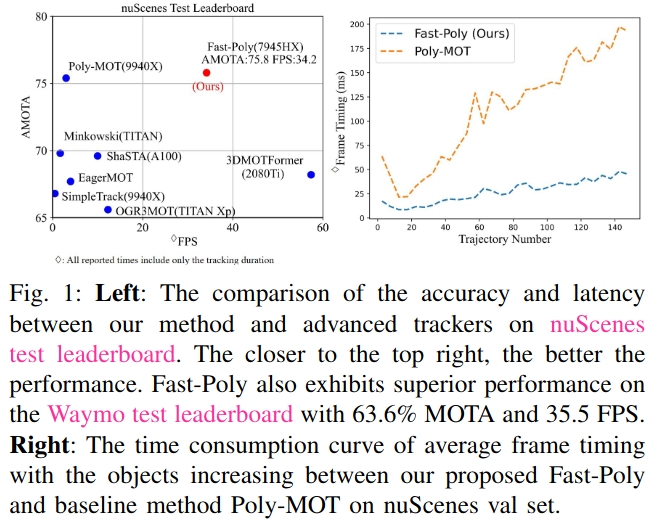
基于以前的工作Poly-MOT提出了fast-poly,解决3D空间中的对象旋转各向异性问题,增强
局部计算密集化,并利用并行化技术,提高推理速度和精度。
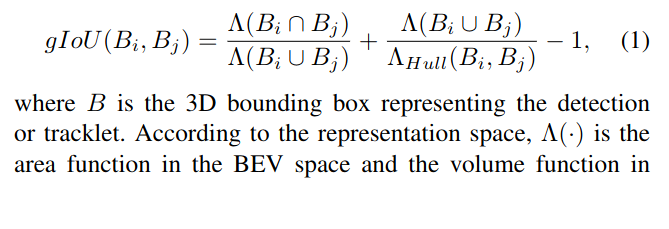
(1) 对齐:通过对齐对象,我们提出的A-GIoU解决了3D旋转对相似性计算的不利影响。
(2) 密集化:通过软生命周期管理、体素掩模和轻量级滤波器,我们分别提高了轨迹管理、代价矩阵构建和滤波器估计的计算效率。
(3) 并行化:基于多处理技术,我们并行执行预测和预处理模块,有效缓解了TBD框架工作的串行缺陷。
•对象在3D空间中旋转。基于几何的度量(IoU[10],[11],GIoU[1],[2],[4])提供高可解释性和准确捕捉对象间的亲和力,被广泛使用。然而,根据统计数据表二,3D对象旋转导致多边形相交与凸包求解步骤耗时。一些工作[3]、[12]采用了自定义的欧几里德距离可以减少开销,但精度由于缺乏空间关系考虑而丢失。
方法
A 整体结构
B 对齐


















 1699
1699

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









