 Webpack实战:模块打包与自动化
Webpack实战:模块打包与自动化





 本文详细介绍了如何使用Webpack进行环境配置,包括安装必要依赖、设置编译命令及目录结构。通过具体代码示例,展示了如何利用Webpack将多个源代码文件打包成独立的bundle,同时实现自动化构建流程。此外,还涵盖了如何使用CleanWebpackPlugin和HtmlWebpackPlugin等插件来清理输出目录和生成HTML文件。
本文详细介绍了如何使用Webpack进行环境配置,包括安装必要依赖、设置编译命令及目录结构。通过具体代码示例,展示了如何利用Webpack将多个源代码文件打包成独立的bundle,同时实现自动化构建流程。此外,还涵盖了如何使用CleanWebpackPlugin和HtmlWebpackPlugin等插件来清理输出目录和生成HTML文件。
1.环境准备和命令
// 环境准备
npm init -y
npm install --save-dev webpack
npm install --save-dev webpack-cli
npm install --save lodash
npm install --save-dev html-webpack-plugin
npm install clean-webpack-plugin --save-dev
// 编译命令(后面用)
npm run build
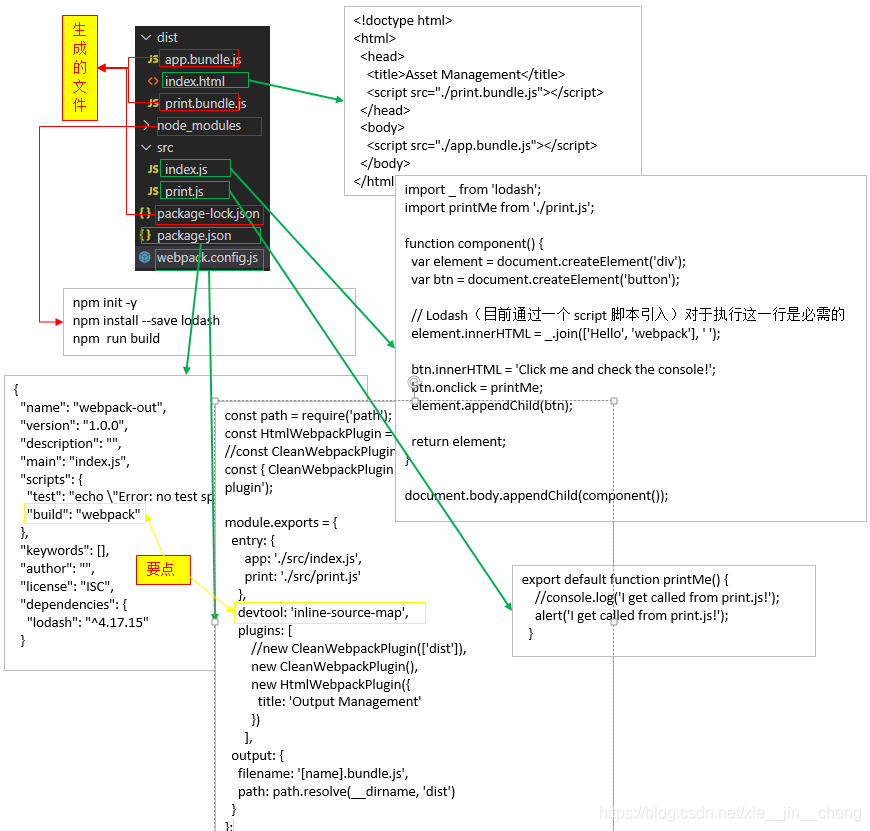
2.目录

3.代码文件
dist/index.html(这个文件是自动生成的)
<!DOCTYPE html>
<html>
<head>
<meta charset="UTF-8">
<title>Output Management</title>
</head>
<body>
<script type="text/javascript" src="app.bundle.js"></script>
<script type="text/javascript" src="print.bundle.js"></script>
</body>
</html>
src/index.js
import _ from 'lodash';
import printMe from './print.js';
function component() {
var element = document.createElement('div');
var btn = document.createElement('button');
// Lodash(目前通过一个 script 脚本引入)对于执行这一行是必需的
element.innerHTML = _.join(['Hello', 'webpack'], ' ');
btn.innerHTML = 'Click me and check the console!';
btn.onclick = printMe;
element.appendChild(btn);
return element;
}
document.body.appendChild(component());
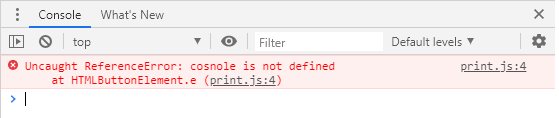
src/print.js
export default function printMe() {
//console.log('I get called from print.js!');
//alert('I get called from print.js!');
cosnole.error('I get called from print.js!');
}
package.json
{
"name": "sourceMap",
"version": "1.0.0",
"description": "",
"main": "index.js",
"scripts": {
"test": "echo \"Error: no test specified\" && exit 1",
"watch": "webpack --watch",
"build": "webpack"
},
"keywords": [],
"author": "",
"license": "ISC",
"devDependencies": {
"clean-webpack-plugin": "^3.0.0",
"html-webpack-plugin": "^3.2.0",
"webpack": "^4.41.5",
"webpack-cli": "^3.3.10"
},
"dependencies": {
"lodash": "^4.17.15"
}
}
webpack.config.js
const path = require('path');
const HtmlWebpackPlugin = require('html-webpack-plugin');
//const CleanWebpackPlugin = require('clean-webpack-plugin');
const { CleanWebpackPlugin } = require('clean-webpack-plugin');
module.exports = {
entry: {
app: './src/index.js',
print: './src/print.js'
},
devtool: 'inline-source-map',
plugins: [
//new CleanWebpackPlugin(['dist']),
new CleanWebpackPlugin(),
new HtmlWebpackPlugin({
title: 'Output Management'
})
],
output: {
filename: '[name].bundle.js',
path: path.resolve(__dirname, 'dist')
}
};
4.运行效果
5.代码分析
6 npm run build


















 237
237

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









