




0. 变量定义
public:
static CTNodeStack contour_graph_;// 这个是局部的 每次都被清空
static std::vector<PointPair> global_contour_; // 每次也被清空
static std::vector<PointPair> inactive_contour_;
static std::vector<PointPair> unmatched_contour_;//这几个是在ExtractGlobalContours()
static std::vector<PointPair> boundary_contour_;
static std::vector<PointPair> local_boundary_;
private:
static CTNodeStack polys_ctnodes_;
static PolygonStack contour_polygons_;
ContourGraphParams ctgraph_params_;
float ALIGN_ANGLE_COS;
NavNodePtr odom_node_ptr_ = NULL;
bool is_robot_inside_poly_ = false;
//global contour set
static std::unordered_set<NavEdge, navedge_hash> global_contour_set_;
static std::unordered_set<NavEdge, navedge_hash> boundary_contour_set_;
1. UpdateContourGraph()
UpdateContourGraph
处理对象:odom_node_ptr filtered_contours(局部多边形轮廓)
处理逻辑:
- 更新odom
- ClearContourGraph:
- contour_graph_
- contour_polygons_
- polys_ctnodes_
- 添加多边形:将从图片提取的提取的多边形轮廓更新到ContourGraph::contour_polygons_中
并更新多边形对应属性:N vertices is_robot_inside is_pillar(是否小到可以忽略形状)perimeter(周长)) - CreatePolygon
- AddPolyToContourPolygon
- 更新FARUtil::free_odom_p
- 更新CTNode属性:对ContourGraph::contour_polygons_中的多边形顶点更新对应属性:
- 根据更新后的odom位置更新多边形is_robot_inside属性
- 对pillar 非pillar多边形分别更新CTNode:
!position
?is_global_match
?is_contour_necessary
?is_ground_associate
?nav_node_id
!?free_direct
!poly_ptr
!front
!back
?connect_nodes
注意这里更新的属性都是跟多边形本身轮廓形状相关的
c. 将更新后的CTNode添加到contour_graph_中 - 更新polys_ctnodes_:add first ctnode of each polygon to poly ctnodes stack(ContourGraph::polys_ctnodes_)
- 更新contour_graph_中CTNode属性:
!position
?is_global_match
?is_contour_necessary
?is_ground_associate
?nav_node_id
!free_direct
!surf_dirs(first second)---->front 方向和back方向的单位向量(可能存在特殊情况,没细看是啥样的 )
!poly_ptr(按照节点更新is_pillar)
!front
!back
?connect_nodes
注意这里的is_pillar分为多边形和边两种
void ContourGraph::UpdateContourGraph(const NavNodePtr& odom_node_ptr,
const std::vector<std::vector<Point3D>>& filtered_contours) {
odom_node_ptr_ = odom_node_ptr;
this->ClearContourGraph();
for (const auto& poly : filtered_contours) {
PolygonPtr new_poly_ptr = NULL;
this->CreatePolygon(poly, new_poly_ptr);
this->AddPolyToContourPolygon(new_poly_ptr);
}
ContourGraph::UpdateOdomFreePosition(odom_node_ptr_, FARUtil::free_odom_p);
for (const auto& poly_ptr : ContourGraph::contour_polygons_) {
poly_ptr->is_robot_inside = FARUtil::PointInsideAPoly(poly_ptr->vertices, FARUtil::free_odom_p);
CTNodePtr new_ctnode_ptr = NULL;
if (poly_ptr->is_pillar) {
Point3D mean_p = FARUtil::AveragePoints(poly_ptr->vertices);
this->CreateCTNode(mean_p, new_ctnode_ptr, poly_ptr, true);
this->AddCTNodeToGraph(new_ctnode_ptr);
} else {
CTNodeStack ctnode_stack;
ctnode_stack.clear();
const int N = poly_ptr->vertices.size();
for (std::size_t idx=0; idx<N; idx++) {
this->CreateCTNode(poly_ptr->vertices[idx], new_ctnode_ptr, poly_ptr, false);
ctnode_stack.push_back(new_ctnode_ptr);
}
// add connections to contour nodes
for (int idx=0; idx<N; idx++) {
int ref_idx = FARUtil::Mod(idx-1, N);
ctnode_stack[idx]->front = ctnode_stack[ref_idx];
ref_idx = FARUtil::Mod(idx+1, N);
ctnode_stack[idx]->back = ctnode_stack[ref_idx];
this->AddCTNodeToGraph(ctnode_stack[idx]);
}
// add first ctnode of each polygon to poly ctnodes stack
if (!ctnode_stack.empty()) ContourGraph::polys_ctnodes_.push_back(ctnode_stack.front());
}
}
this->AnalysisSurfAngleAndConvexity(ContourGraph::contour_graph_);
}
1.1. AnalysisSurfAngleAndConvexity
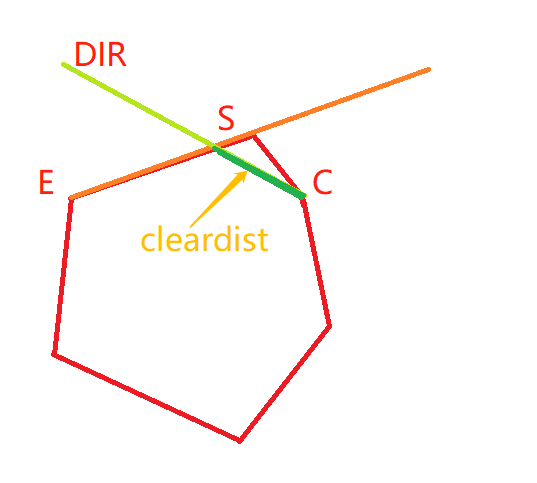
surf_dirs计算逻辑:
- 边长都大于cleardist,表示的是当前节点与前后节点的方向向量
- 若前后节点中对应的边长存在小于cleardist的情况:
- 找到当前节点沿着对应方
- 向(front/back)最早满足边长>=cleardist的边
- 在该边对应的直线上找到与当前节点距离等于cleardist的点
- 返回当前节点到该节点的方向向量
free_direct - 先看是不是pillar
- 再看是不是wall 若为wall 则为unkown (默认都是unknown,这里为啥单独判断呢?)
- 都不是再判断凹凸性:根据当前节点向着其拓扑方向(前后方向合成的向量)移动一点点后,是在多边形内部还是外部来判断(若在内部则为凸)
- 若机器人不在该多边形内部,凸就是凸 凹就是凹
- 若机器人在该多边形内部,凹就是凸 凸就是凹
/* 若当前节点的surf_dirs 对应的两个方向相反 即反向共线 则该is_wall为true 否则返回其拓扑方向*/
Point3D FARUtil::SurfTopoDirect(const PointPair& dirs, bool& _is_wall) {
const Point3D topo_dir = dirs.first + dirs.second;
_is_wall = false;
if (topo_dir.norm_flat() > FARUtil::kEpsilon) {
return topo_dir.normalize_flat();
} else {
_is_wall = true;
return Point3D(0,0,0);
}
}
void ContourGraph::AnalysisSurfAngleAndConvexity(const CTNodeStack& contour_graph) {
for (const auto& ctnode_ptr : contour_graph) {
if (ctnode_ptr->free_direct == NodeFreeDirect::PILLAR || ctnode_ptr->poly_ptr->is_pillar) {
ctnode_ptr->surf_dirs = {Point3D(0,0,-1), Point3D(0,0,-1)};
ctnode_ptr->poly_ptr->is_pillar = true;
ctnode_ptr->free_direct = NodeFreeDirect::PILLAR;
} else {
CTNodePtr next_ctnode;
// front direction
next_ctnode = ctnode_ptr->front;
Point3D start_p = ctnode_ptr->position;
Point3D end_p = next_ctnode->position;
float edist = (end_p - ctnode_ptr->position).norm_flat();
while (next_ctnode != NULL && next_ctnode != ctnode_ptr && edist < FARUtil::kNavClearDist) {
next_ctnode = next_ctnode->front;
start_p = end_p;
end_p = next_ctnode->position;
edist = (end_p - ctnode_ptr->position).norm_flat();
}
if (edist < FARUtil::kNavClearDist) { // This Node should be a pillar.
ctnode_ptr->surf_dirs = {Point3D(0,0,-1), Point3D(0,0,-1)};
ctnode_ptr->poly_ptr->is_pillar = true;
ctnode_ptr->free_direct = NodeFreeDirect::PILLAR;
continue;
} else {
ctnode_ptr->surf_dirs.first = FARUtil::ContourSurfDirs(end_p, start_p, ctnode_ptr->position, FARUtil::kNavClearDist);
}
// back direction
next_ctnode = ctnode_ptr->back;
start_p = ctnode_ptr->position;
end_p = next_ctnode->position;
edist = (end_p - ctnode_ptr->position).norm_flat();
while (next_ctnode != NULL && next_ctnode != ctnode_ptr && edist < FARUtil::kNavClearDist) {
next_ctnode = next_ctnode->back;
start_p = end_p;
end_p = next_ctnode->position;
edist = (end_p - ctnode_ptr->position).norm_flat();
}
if (edist < FARUtil::kNavClearDist) { // This Node should be a pillar.
ctnode_ptr->surf_dirs = {Point3D(0,0,-1), Point3D(0,0,-1)}; // TODO!
ctnode_ptr->poly_ptr->is_pillar = true;
ctnode_ptr->free_direct = NodeFreeDirect::PILLAR;
continue;
} else {
ctnode_ptr->surf_dirs.second = FARUtil::ContourSurfDirs(end_p, start_p, ctnode_ptr->position, FARUtil::kNavClearDist);
}
}
// analysis convexity (except pillar)
this->AnalysisConvexityOfCTNode(ctnode_ptr);
}
}
1.2. ContourSurfDirs
Point3D FARUtil::ContourSurfDirs(const Point3D& end_p,
const Point3D& start_p,
const Point3D& center_p,
const float& radius)
{
const float D = (center_p - end_p).norm_flat();
const float phi = std::acos((center_p - end_p).norm_flat_dot(start_p - end_p));
const float H = D * sin(phi);
if (H < FARUtil::kEpsilon) { // co-linear
return (end_p - center_p).normalize_flat();
}
const float theta = asin(FARUtil::ClampAbsRange(H / radius, 1.0f));//theta是被跳过的节点与当前节点
const Point3D dir = (start_p - end_p).normalize_flat();
const Point3D V_p = end_p + dir * D * cos(phi);
const Point3D K_p = V_p - dir * radius * cos(theta);
return (K_p - center_p).normalize_flat();;
}
1.3 AnalysisConvexityOfCTNode
void ContourGraph::AnalysisConvexityOfCTNode(const CTNodePtr& ctnode_ptr) {
if (ctnode_ptr->surf_dirs.first == Point3D(0,0,-1) || ctnode_ptr->surf_dirs.second == Point3D(0,0,-1) || ctnode_ptr->poly_ptr->is_pillar) {
ctnode_ptr->surf_dirs.first = Point3D(0,0,-1), ctnode_ptr->surf_dirs.second == Point3D(0,0,-1);
ctnode_ptr->poly_ptr->is_pillar = true;
ctnode_ptr->free_direct = NodeFreeDirect::PILLAR;
return;
}
bool is_wall = false;
const Point3D topo_dir = FARUtil::SurfTopoDirect(ctnode_ptr->surf_dirs, is_wall);
if (is_wall) {
ctnode_ptr->free_direct = NodeFreeDirect::UNKNOW;
return;
}
const Point3D ev_p = ctnode_ptr->position + topo_dir * FARUtil::kLeafSize;
if (FARUtil::IsConvexPoint(ctnode_ptr->poly_ptr, ev_p)) {
ctnode_ptr->free_direct = NodeFreeDirect::CONVEX;
} else {
ctnode_ptr->free_direct = NodeFreeDirect::CONCAVE;
}
}
2. MatchContourWithNavGraph()
注意:这里的ContourGraph::contour_graph_中是添加了高度的~~~在轮廓匹配的时候还有没有高度哦
MatchContourWithNavGraph:Match current contour with global navigation nodes(near nav nodes)
处理对象:global_nodes(DynamicGraph::globalGraphNodes_),near_nodes(DynamicGraph::extend_match_nodes_), new_convex_vertices
处理逻辑:
- 重置global_nodes中的CTNode匹配属性
- 对当前所有CTNode(存放于ContourGraph::contour_graph_)在near_nodes中找到与其最匹配的NavNode节点(距离)
- 对匹配节点进行校验(方向??再确认)
- 更新通过校验的CTNode与NavNode的匹配关系(对应属性更新)
- 根据匹配后的CTNode对未匹配到的CTNode进行多边形校验:
- 是否存在block_vertex(只有这样的节点才有is_contour_necessary),
- 若存在是否为必要点(更新对应节点属性)
- 清空new_convex_vertices
- 添加没有匹配到全局且free_direct属性非未知且非pillar的非wall节点到new_convex_vertices中
注意:
CTNode与待匹配NavNode顶点所在多边形顶点的角平分线方向夹角角度偏差60度范围内且两者距离在2倍车身距离内,目前找到的角度和距离最接近的点
如果当前的点没有之前最优的点好,则返回空~~~~表示当前匹配失败
匹配失败的点,会被判断是否必要点 添加没有匹配到全局且free_direct属性非未知且非pillar的非wall节点到待更新节点
匹配失败但是必要节点的CTNode会被标记为is_block_frontier
调用:
// Match near nav nodes with contour
contour_graph_.MatchContourWithNavGraph(nav_graph_, near_nav_graph_, new_ctnodes_);
nav_graph_对应的是 DynamicGraph::globalGraphNodes_ ,是所有的NavNode?
/* Match current contour with global navigation nodes */
void ContourGraph::MatchContourWithNavGraph(const NodePtrStack& global_nodes, const NodePtrStack& near_nodes, CTNodeStack& new_convex_vertices) {
// global_nodes 中所有NavNode中与CTNode匹配信息重置为默认值
// 每次更新都要重置 匹配是动态更新的(局部是跟随当前位置变化的)
for (const auto& node_ptr : global_nodes) {
node_ptr->is_contour_match = false;
node_ptr->ctnode = NULL;
}
//对当前得到的CTNode节点
//1. 全局匹配属性重置为默认值
//2. 对节点free_direct属性不为UNKNOW的节点,在near_nodes中找到其matched_node
//3. 若matched_node不为空且IsCTMatchLineFreePolygon(参考具体操作 这里有点没太明白~~~),
// 则建立该CTNode与matched_node(NavNode)之间的匹配关系
for (const auto& ctnode_ptr : ContourGraph::contour_graph_) { // distance match
ctnode_ptr->is_global_match = false;
ctnode_ptr->nav_node_id = 0;
if (ctnode_ptr->free_direct != NodeFreeDirect::UNKNOW) {
const NavNodePtr matched_node = this->NearestNavNodeForCTNode(ctnode_ptr, near_nodes);
if (matched_node != NULL && IsCTMatchLineFreePolygon(ctnode_ptr, matched_node, false)) {
this->MatchCTNodeWithNavNode(ctnode_ptr, matched_node);
}
}
}
// 根据匹配结果 重新做多边形校验(参考-->EnclosePolygonsCheck):
// 判断多边形轮廓中没有匹配到全局的点中是否有block_vertex点
// 若存在block_vertex点判断其是否是轮廓必要点(CTNode.is_contour_necessary)
this->EnclosePolygonsCheck();
//** 注意:至此,CTNode属性又更新了全局匹配属性及is_contour_necessary属性**//
// 清空new_convex_vertices
new_convex_vertices.clear();
// 对更新属性后的CTNode:
// 若非全局匹配且free_direct 非未知且非pillar:
// 检测节点是否是wall(与前后顶点的夹角接近180),将非wall的顶点添加到new_convex_vertices中
// 注意:这里是添加了没有匹配到全局且free_direct属性非未知且非pillar的非wall节点
for (const auto& ctnode_ptr : ContourGraph::contour_graph_) { // Get new vertices
if (!ctnode_ptr->is_global_match && ctnode_ptr->free_direct != NodeFreeDirect::UNKNOW) {
if (ctnode_ptr->free_direct != NodeFreeDirect::PILLAR) { // check wall contour
const float dot_value = ctnode_ptr->surf_dirs.first * ctnode_ptr->surf_dirs.second;
if (dot_value < ALIGN_ANGLE_COS) continue; // wall detected
}
new_convex_vertices.push_back(ctnode_ptr);
}
}
}
2.1 NearestNavNodeForCTNode()
NearestNavNodeForCTNode:轨迹点是不参与匹配的~~~~
CTNode与待匹配NavNode顶点所在多边形顶点的角平分线方向夹角角度偏差60度范围内且两者距离在2倍车身距离内,目前找到的角度和距离最接近的点
如果当前的点没有之前最优的点好,则返回空~~~~表示当前匹配失败
匹配失败的点,会被判断是否必要点 添加没有匹配到全局且free_direct属性非未知且非pillar的非wall节点到待更新节点
匹配失败但是必要节点的CTNode会被标记为is_block_frontier
处理对象:ctnode_ptr near_nodes
NavNodePtr ContourGraph::NearestNavNodeForCTNode(const CTNodePtr& ctnode_ptr, const NodePtrStack& near_nodes) {
float nearest_dist = FARUtil::kINF;
NavNodePtr nearest_node = NULL;
float min_edist = FARUtil::kINF;
const float dir_thred = 0.5f; //cos(pi/3);
for (const auto& node_ptr : near_nodes) {
// is_odom is_navpoint IsOutsideGoal 都不进行匹配的~~~~
if (node_ptr->is_odom || node_ptr->is_navpoint || FARUtil::IsOutsideGoal(node_ptr) || !IsInMatchHeight(ctnode_ptr, node_ptr)) continue;
// no match with pillar to non-pillar local vertices
if ((node_ptr->free_direct == NodeFreeDirect::PILLAR && ctnode_ptr->free_direct != NodeFreeDirect::PILLAR) ||
(ctnode_ptr->free_direct == NodeFreeDirect::PILLAR && node_ptr->free_direct != NodeFreeDirect::PILLAR))
{
continue;
}
float dist_thred = FARUtil::kMatchDist;//robot_dim*2
float dir_score = 0.0f;//dir_thred=0.5
if (ctnode_ptr->free_direct != NodeFreeDirect::PILLAR && node_ptr->free_direct != NodeFreeDirect::UNKNOW && node_ptr->free_direct != NodeFreeDirect::PILLAR) {
if (ctnode_ptr->free_direct == node_ptr->free_direct) {
// SurfTopoDirect
const Point3D topo_dir1 = FARUtil::SurfTopoDirect(node_ptr->surf_dirs);
const Point3D topo_dir2 = FARUtil::SurfTopoDirect(ctnode_ptr->surf_dirs);
// topo_dir1 * topo_dir2 相当于cosT T小于60或者大于300的时候 dir_score>0
dir_score = (topo_dir1 * topo_dir2 - dir_thred) / (1.0f - dir_thred);
}
} else if (node_ptr->free_direct == NodeFreeDirect::PILLAR && ctnode_ptr->free_direct == NodeFreeDirect::PILLAR) {
dir_score = 0.5f;
}
dist_thred *= dir_score;//T=0的时候该值最大 就是角度越接近距离限制越宽松(<60 >300)60~300夹角范围内不可能有满足条件的点
const float edist = (node_ptr->position - ctnode_ptr->position).norm_flat();
if (edist < dist_thred && edist < min_edist) {
nearest_node = node_ptr;
min_edist = edist;
}
}
if (nearest_node != NULL && nearest_node->is_contour_match) {
const float pre_dist = (nearest_node->position - nearest_node->ctnode->position).norm_flat();
if (min_edist < pre_dist) {
// reset matching for previous ctnode
RemoveMatchWithNavNode(nearest_node);
} else {
nearest_node = NULL;
}
}
return nearest_node;
}
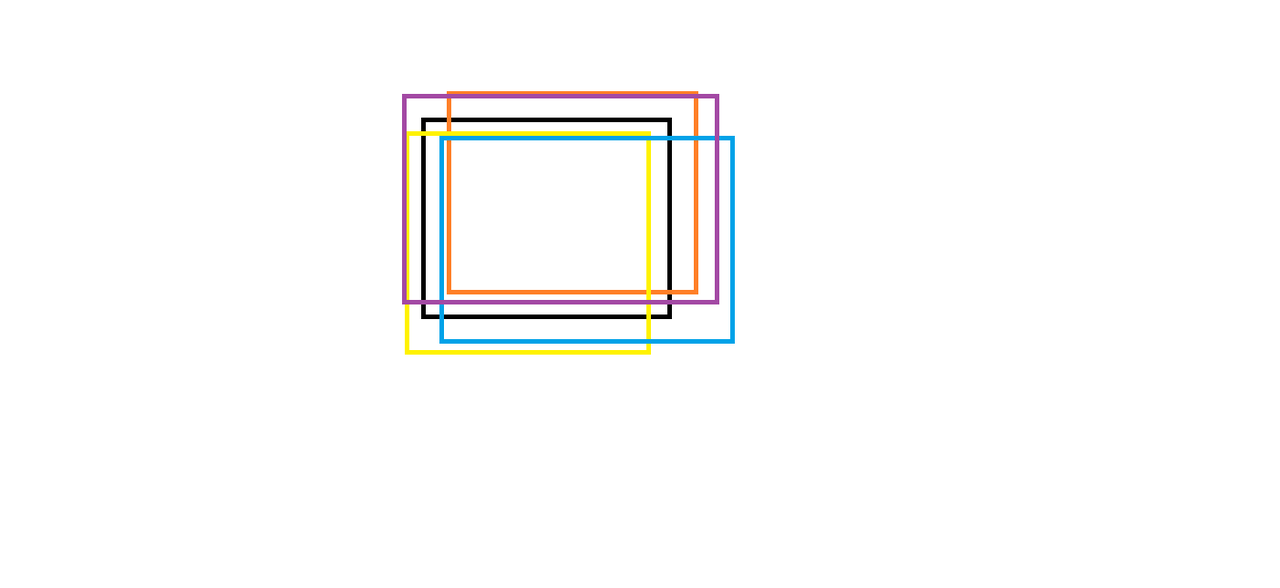
2.2 IsCTMatchLineFreePolygon()
这个用于匹配 就是匹配的两个节点的freepoint 中和之后还是个freepoint?
没太懂是解决啥问题的?
若黑色是NavNode 其他是匹配到的轮廓
红色和黄色蓝色的节点就是符合要求的
但是紫色的就不行 除非两个节点几乎重合才行(要不然找到的freepoint 会被紫色多边形包住)
所以 这是为啥呢??
bool ContourGraph::IsCTMatchLineFreePolygon(const CTNodePtr& matched_ctnode, const NavNodePtr& matched_navnode, const bool& is_global_check) {
/*如果匹配到的两个点足够近,直接返回true*/
if ((matched_ctnode->position - matched_navnode->position).norm() < FARUtil::kNavClearDist) return true;
/*否则,进行IsPointsConnectFreePolygon检验*/
const HeightPair h_pair(matched_ctnode->position, matched_navnode->position);
const ConnectPair bd_cedge = ConnectPair(matched_ctnode->position, matched_navnode->position);
const ConnectPair cedge = ContourGraph::ReprojectEdge(matched_ctnode, matched_navnode, FARUtil::kProjectDist);
return ContourGraph::IsPointsConnectFreePolygon(cedge, bd_cedge, h_pair, is_global_check);
}
2.3 IsNavNodesConnectFreePolygon()
两个节点相连不穿障碍物
bool ContourGraph::IsNavNodesConnectFreePolygon(const NavNodePtr& node_ptr1, const NavNodePtr& node_ptr2) {
if (node_ptr1->is_navpoint || node_ptr2->is_navpoint) {
if ((node_ptr1->position - node_ptr2->position).norm() < FARUtil::kNavClearDist) { // connect to internav node
return true;
}
}
const bool is_global_check = ContourGraph::IsNeedGlobalCheck(node_ptr1->position, node_ptr2->position);
ConnectPair cedge = ContourGraph::ReprojectEdge(node_ptr1, node_ptr2, FARUtil::kProjectDist, is_global_check);
if (node_ptr1->is_odom) {
cedge.start_p = cv::Point2f(FARUtil::free_odom_p.x, FARUtil::free_odom_p.y);
} else if (node_ptr2->is_odom) {
cedge.end_p = cv::Point2f(FARUtil::free_odom_p.x, FARUtil::free_odom_p.y);
}
ConnectPair bd_cedge = cedge;
const HeightPair h_pair(node_ptr1->position, node_ptr2->position);
if (!node_ptr1->is_boundary) bd_cedge.start_p = cv::Point2f(node_ptr1->position.x, node_ptr1->position.y);
if (!node_ptr2->is_boundary) bd_cedge.end_p = cv::Point2f(node_ptr2->position.x, node_ptr2->position.y);
return ContourGraph::IsPointsConnectFreePolygon(cedge, bd_cedge, h_pair, is_global_check);
}
2.4 IsPointsConnectFreePolygon()
IsPointsConnectFreePolygon:当前节点与所匹配节点的连线与当前所有轮廓都没有交叉?
bool ContourGraph::IsPointsConnectFreePolygon(const ConnectPair& cedge,
const ConnectPair& bd_cedge,
const HeightPair h_pair,
const bool& is_global_check)
{
// check for boundaries edges
for (const auto& contour : ContourGraph::boundary_contour_) {
if (!ContourGraph::IsEdgeOverlapInHeight(h_pair, HeightPair(contour.first, contour.second))) continue;
if (ContourGraph::IsEdgeCollideSegment(contour, bd_cedge)) {
return false;
}
}
if (!is_global_check) {
// check for local range polygons
const Point3D center_p = Point3D((cedge.start_p.x + cedge.end_p.x) / 2.0f,
(cedge.start_p.y + cedge.end_p.y) / 2.0f,
0.0f);
for (const auto& poly_ptr : ContourGraph::contour_polygons_) {
if (poly_ptr->is_pillar) continue;
// 节点本身所在的多边形是不是可能会包这个点呢??? 就是无论如何不能包?
// 除非两者之间的距离一半小于投影距离 要不就CTNode所在的
// 全局有膨胀?
// 这跟两个节点的相对位置有关系呀 CTNode所在多边形包住NavNode的时候好像就不成立了
// 这种为啥就不行呢?说明啥呀?
if ((poly_ptr->is_robot_inside != FARUtil::PointInsideAPoly(poly_ptr->vertices, center_p)) ||
ContourGraph::IsEdgeCollidePoly(poly_ptr->vertices, cedge))
{
return false;
}
}
// check for unmatched local contours
for (const auto& contour : ContourGraph::unmatched_contour_) {
if (ContourGraph::IsEdgeCollideSegment(contour, cedge)) {
return false;
}
}
// check for any inactive local contours
for (const auto& contour : ContourGraph::inactive_contour_) {
if (ContourGraph::IsEdgeCollideSegment(contour, cedge)) {
return false;
}
}
} else {
for (const auto& contour : ContourGraph::global_contour_) {
if (!ContourGraph::IsEdgeOverlapInHeight(h_pair, HeightPair(contour.first, contour.second))) continue;
if (ContourGraph::IsEdgeCollideSegment(contour, cedge)) {
return false;
}
}
for (const auto& poly_ptr : ContourGraph::contour_polygons_) {
if (poly_ptr->is_pillar) continue;
if (ContourGraph::IsEdgeCollidePoly(poly_ptr->vertices, cedge)) {
return false;
}
}
}
return true;
}
2.5 ContourGraph::EnclosePolygonsCheck()
处理对象:ContourGraph::polys_ctnodes_:ctnode_ptr (对每一个多边形对象)
处理逻辑:
- 判断多边形轮廓中没有匹配到全局的点中是否有block_vertex点
- 若有block_vertex顶点,判断是否是is_contour_necessary(根据is_ground_associate)
问题:is_contour_necessary is_ground_associate 初始的时候都是false
is_ground_associate 啥时候才是true
void ContourGraph::EnclosePolygonsCheck() {
for (const auto& ctnode_ptr : ContourGraph::polys_ctnodes_) { // loop each polygon
if (ctnode_ptr->poly_ptr->is_pillar) continue;//若pillar不处理
const CTNodePtr start_ctnode_ptr = FirstMatchedCTNode(ctnode_ptr);//找到多边形中第一个匹配到NavNode的节点
if (start_ctnode_ptr == NULL) continue;//若没有匹配到的全局点 不处理
/* 按照front方向取pre cur 节点*/
CTNodePtr pre_ctnode_ptr = start_ctnode_ptr;
CTNodePtr cur_ctnode_ptr = start_ctnode_ptr->front;
/* 确保取到的pre cur节点都是global_match*/
// 对多边形内所有匹配到的NavNode的相邻顶点对进行block_vertex判断
// 并对找到的block_vertex判断是否is_contour_necessary(根据is_ground_associate )
while (cur_ctnode_ptr != start_ctnode_ptr) {
if (!cur_ctnode_ptr->is_global_match) {
cur_ctnode_ptr = cur_ctnode_ptr->front;
continue;
}
CTNodePtr block_vertex = NULL;
//参考方法:IsCTNodesConnectWithinOrder()
// 注意是判断两个顶点之间的多边形轮廓没有那种奇怪的形状(突出的夹角)
//类似下面这种:1 2 3 4为多边形的顶点
// 其中 1 4为匹配到全局的顶点
// 2 3为待检验的点
// 若2或者3 出现下面这种情况 则会返回false同时返回2或者3作为block_vertex
// 这种形状的边不符合最短路径?
//*(ctnode2)--------------------------------------------------*(ctnode3)
// o(ctnode1)-------------------o(ctnode4)
// 若存在着种情况则会走下面的逻辑:
// 若所返回的block_vertex顶点是is_ground_associate 且IsPointInMarginRange
// 则block_vertex->is_contour_necessary属性为true(新创建的CTNode这些属性都是false)
//?is_ground_associate啥时候是true的?是在terrain_grid_traverse_list_中匹配到该点就是true
//表示地形可达的??
if (!IsCTNodesConnectWithinOrder(pre_ctnode_ptr, cur_ctnode_ptr, block_vertex) && block_vertex != NULL) {
if (block_vertex->is_ground_associate && FARUtil::IsPointInMarginRange(block_vertex->position)) {
block_vertex->is_contour_necessary = true;
}
}
pre_ctnode_ptr = cur_ctnode_ptr;
cur_ctnode_ptr = cur_ctnode_ptr->front;
}
}
}
输入参数:ctnode1,ctnode2为一个多边形中front方向取到的与NavNode匹配到的邻近节点
处理逻辑:
- 若两节点相等或者不在同一个多边形内 则返回false
- 取ctnode1的front节点作为next_ctnode
- 若next_ctnode不为空且ctnode2与next_ctnode不是同一个节点:
- 判断ctnode1的front节点是否在ctnode1 ctnode2的柱形区域内
1. 若不在,block_vertex = next_ctnode;返回false
2. 若在,取next_ctnode的front节点更新next_ctnode,继续下一次判断 - 若next_ctnode为空或者ctnode2与next_ctnode是同一个节点直接返回true
- 3中ctnode1与ctnode2中间所有节点都通过检测,返回ture
注意:返回true的时候block_vertex 是为null的
bool ContourGraph::IsCTNodesConnectWithinOrder(const CTNodePtr& ctnode1, const CTNodePtr& ctnode2, CTNodePtr& block_vertex) {
block_vertex = NULL;
if (ctnode1 == ctnode2 || ctnode1->poly_ptr != ctnode2->poly_ptr) return false;
CTNodePtr next_ctnode = ctnode1->front; // forward search
while (next_ctnode != NULL && next_ctnode != ctnode2) {
if (!FARUtil::IsInCylinder(ctnode1->position, ctnode2->position, next_ctnode->position, FARUtil::kNearDist, true)) {
block_vertex = next_ctnode;
return false;
}
next_ctnode = next_ctnode->front;
}
return true;
}
3. ExtractGlobalContours()
轮廓是局部的
这里为啥整全局的轮廓呢?
全局的作用是啥?
—>通过调用关系来看 这个是记录实际更新到全局的轮廓
UpdateNavGraph()--------> GraphCallBack()
TopTwoContourConnector()-----> FillContourConnect()
AddContourConnect()------>
AddContourToSets()---->
后面进行轮廓连接的进行有效检验的时候是基于这个的 会首先判断 is_global_check是否是true
is_boundary 这个属性没看出啥时候会更新呢
根据global_contour_set_ 和boundary_contour_set_来更新下面几个集合?
这个两个集合是全局的 一直记录到目前为止被匹配到全局并且产生连接的轮廓
并且global_contour_set_ 包含boundary_contour_set_
这几个集合每次也会被先清空 然后根据当前最新的global_contour_set_ 和boundary_contour_set_来更新对应的集合
static std::vector global_contour_; // 每次也被清空??
static std::vector inactive_contour_;
static std::vector unmatched_contour_; 这几个是在ExtractGlobalContours()
static std::vector boundary_contour_;
static std::vector local_boundary_;
并且每次都先clear() 所以也是个局部?
看着后面更新轮廓连线关系的时候也会同时更新 global_contour_ boundary_contour_
inactive_contour_ unmatched_contour_ 是怎么更新呢???
void ContourGraph::ExtractGlobalContours() {
ContourGraph::global_contour_.clear();
ContourGraph::inactive_contour_.clear();
ContourGraph::unmatched_contour_.clear();
ContourGraph::boundary_contour_.clear();
ContourGraph::local_boundary_.clear();
for (const auto& edge : ContourGraph::global_contour_set_) {
ContourGraph::global_contour_.push_back({edge.first->position, edge.second->position});
if (IsEdgeInLocalRange(edge.first, edge.second)) {
if (!this->IsActiveEdge(edge.first, edge.second)) {
ContourGraph::inactive_contour_.push_back({edge.first->position, edge.second->position});
} else if (!edge.first->is_near_nodes || !edge.second->is_near_nodes) {
PointPair unmatched_pair = std::make_pair(edge.first->position, edge.second->position);
if (edge.first->is_contour_match) {
unmatched_pair.first = edge.first->ctnode->position;
} else if (edge.second->is_contour_match) {
unmatched_pair.second = edge.second->ctnode->position;
}
ContourGraph::unmatched_contour_.push_back(unmatched_pair);
}
}
}
for (const auto& edge : ContourGraph::boundary_contour_set_) {
ContourGraph::boundary_contour_.push_back({edge.first->position, edge.second->position});
if (IsEdgeInLocalRange(edge.first, edge.second)) {
ContourGraph::local_boundary_.push_back({edge.first->position, edge.second->position});
bool is_new_invalid = false;
if (!IsValidBoundary(edge.first, edge.second, is_new_invalid) && is_new_invalid) {
edge.first->invalid_boundary.insert(edge.second->id);
edge.second->invalid_boundary.insert(edge.first->id);
}
}
}
}


















 1616
1616

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









