










 本文介绍了摄像头与激光雷达在自动驾驶中的融合算法,重点在于目标的关联匹配。通过软件架构展示了四个摄像头和四个激光雷达的数据处理流程,并详细讲解了目标数据结构、初始化及基于匈牙利算法的目标关联方法,旨在实现十字路口的全息感知。
本文介绍了摄像头与激光雷达在自动驾驶中的融合算法,重点在于目标的关联匹配。通过软件架构展示了四个摄像头和四个激光雷达的数据处理流程,并详细讲解了目标数据结构、初始化及基于匈牙利算法的目标关联方法,旨在实现十字路口的全息感知。
1、前言
确实是好久没有写博客了,好多朋友一直催我写融合得,接下来我更新快点,接着上一篇
https://xiaorun.blog.youkuaiyun.com/article/details/108870764继续介绍,接下来我介绍如何进行关联匹配,完成十字路口全息感知得整体项目,全息路口是利用路口雷达+摄像机两种感知手段,在保证原有正常非现场执法功能基础上,融合行业最新的传感器技术、高精度地图技术、AI算法、大算力芯片、边缘计算技术,构建“智慧+感知”能力,生成车辆时空、过车身份、分米级车辆轨迹、信号灯状态等多种精准、高效、实时的元数据,为路口精细化管理奠定了完备的数据基础
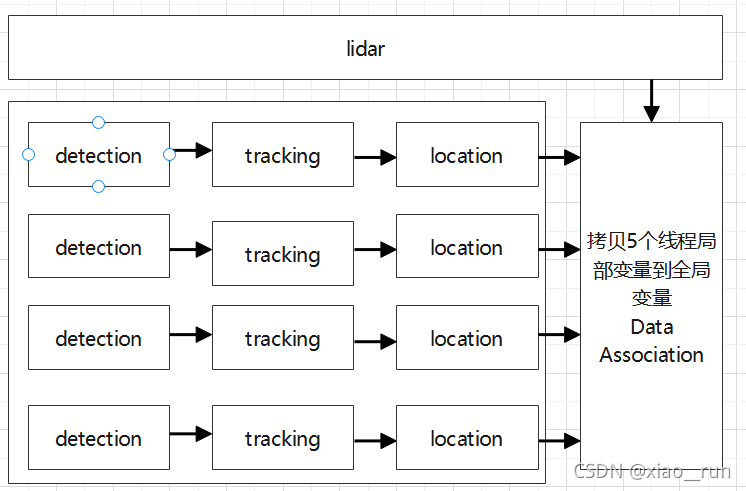
2、软件框架
首先我们看下整体软件架构,项目上为四个激光雷达,四个摄像头,摄像头检测追踪定位算法前面不少博文已经讲得很清楚了
 </
</

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











