




 本文详细解析了TurtleBot3在ROS2 humble中的Fake Node,包括目录结构、启动方法和代码解析。介绍了Fake Node的启动命令、节点功能,如订阅/cmd_vel并发布/odom、/joint_states、/tf话题。同时,概述了TurtleBot3模型定义、参数文件和关键代码实现,包括构造函数、订阅器回调和定时器回调函数的工作原理。最后展示了Fake Node在rviz中的仿真效果及键盘操作。
本文详细解析了TurtleBot3在ROS2 humble中的Fake Node,包括目录结构、启动方法和代码解析。介绍了Fake Node的启动命令、节点功能,如订阅/cmd_vel并发布/odom、/joint_states、/tf话题。同时,概述了TurtleBot3模型定义、参数文件和关键代码实现,包括构造函数、订阅器回调和定时器回调函数的工作原理。最后展示了Fake Node在rviz中的仿真效果及键盘操作。
TurtleBot3在ROS2 humble中成功安装好了之后,我们就来解析一下其中的代码,首先是Fake Node。主要从如下几方面入手,进行讲解:
1. 目录结构
2. 启动Fake Node
3. 代码解析
TurtleBot3在ROS2 humble中安装,请参照下面文章:(29条消息) 基于Ubuntu22.04在ROS2 Humble中编译turtlebot3遇到的坑_数据绿洲的博客-优快云博客
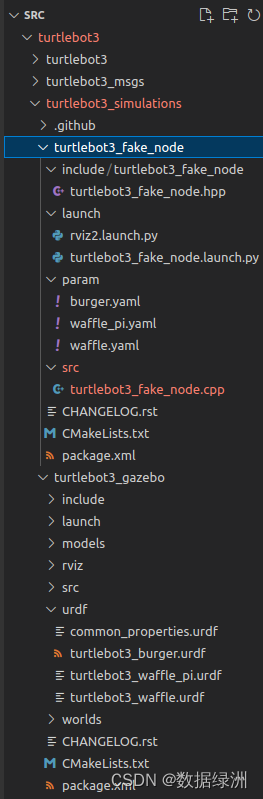
1. 目录结构
目录包含工程相关的CMakeList.txt,package.xml,部署文件,参数文件,urdf模型文件,源文件等。
2. 启动Fake Node
Fake Node启动命令:
![]()
键盘操作节点启动命令:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2833
2833

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









