










 本文介绍了一种使用矩阵快速幂优化递推序列计算的方法,适用于求解随机大数值问题。通过构造特定矩阵并利用矩阵快速幂算法,该方法能够在O(logn)的时间复杂度内高效求解递归序列中的第n项,尤其当序列中包含分段常数项时,此方法的优势更为明显。
本文介绍了一种使用矩阵快速幂优化递推序列计算的方法,适用于求解随机大数值问题。通过构造特定矩阵并利用矩阵快速幂算法,该方法能够在O(logn)的时间复杂度内高效求解递归序列中的第n项,尤其当序列中包含分段常数项时,此方法的优势更为明显。
Sequence
Time Limit: 4000/2000 MS (Java/Others) Memory Limit: 262144/262144 K (Java/Others)
Total Submission(s): 1951 Accepted Submission(s): 750
Problem Description
Let us define a sequence as below
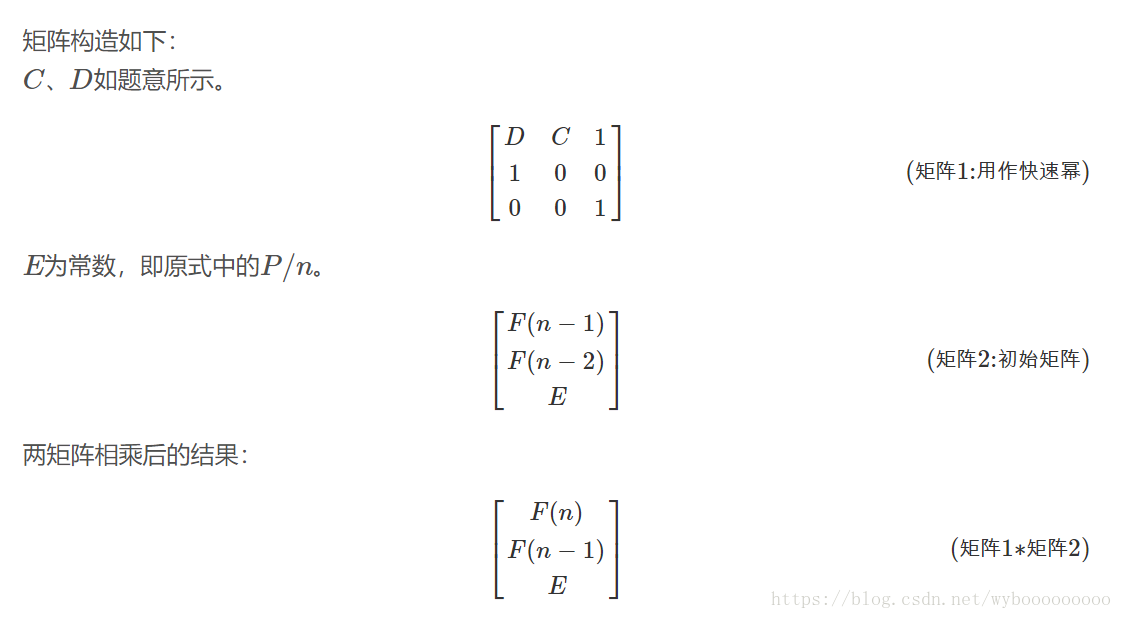
⎧⎩⎨⎪⎪⎪⎪⎪⎪F1F2Fn===ABC⋅Fn−2+D⋅Fn−1+⌊Pn⌋
Your job is simple, for each task, you should output Fn module 109+7.
Input
The first line has only one integer T, indicates the number of tasks.
Then, for the next T lines, each line consists of 6 integers, A , B, C, D, P, n.
1≤T≤200≤A,B,C,D≤1091≤P,n≤109
Sample Input
2 3 3 2 1 3 5 3 2 2 2 1 4
Sample Output
36 24
Source
2018 Multi-University Training Contest 7
Recommend
chendu | We have carefully selected several similar problems for you: 6408 6407 6406 6405 6404
学习了一个新的递推求数的方法
通过构造矩阵 用矩阵递推 用矩阵快速幂优化 可以用来求一个随机的很大的数的值
矩阵快速幂的写法 O(logn)

这道题还有一点特别的是 后面的常数项是会变化的 但是他是分段的
所以就分块的来求 因为要知道乘的次数所以每次要求一下这个区间有多少个数
c++TLE g++AC
#include<iostream>
#include<stdio.h>
#include<string.h>
#include<algorithm>
#include<stack>
#define inf 1e18
using namespace std;
long long t, a, b, c, d, p, n;
const int mod = 1e9 + 7;
struct mat{
long long m[3][3];
mat(){
memset(m, 0, sizeof(m));
}
void init()
{
memset(m, 0, sizeof(m));
for(int i = 0; i < 3; i++){
m[i][i] = 1;
}
}
friend mat operator * (mat a, mat b)
{
mat c;
for(int i = 0; i < 3; i++){
for(int j = 0; j < 3; j++){
for(int k = 0; k < 3; k++){
c.m[i][j] += a.m[i][k] * b.m[k][j];
c.m[i][j] %= mod;
}
}
}
return c;
}
};
mat pow_mat(mat a, int b)
{
mat c;
c.init();
while(b){
if(b & 1){
c = c * a;
}
a = a * a;
b >>= 1;
}
return c;
}
int main()
{
scanf("%lld", &t);
while(t--){
scanf("%lld%lld%lld%lld%lld%lld", &a, &b, &c, &d, &p, &n);
if(n == 1){
printf("%lld\n", a);
continue;
}
mat f;
f.m[0][0] = d;
f.m[1][0] = c;
f.m[2][0] = f.m[0][1] = f.m[2][2] = 1;
mat g;
g.m[0][0] = b;
g.m[0][1] = a;
if(p >= n){
for(long long i = 3, j; i <= n; i = j + 1){
j = p / (p / i);//个数
g.m[0][2] = p / i;
mat po = pow_mat(f, min(j - i + 1, n - i + 1));
g = g * po;
}
}
else{
for(long long i = 3, j; i <= p; i = j + 1){
j = p / (p / i);
g.m[0][2] = p / i;
mat po = pow_mat(f, j - i + 1);
g = g * po;
}
mat po;
g.m[0][2] = 0;
if(p < 3){
po = pow_mat(f, n - 2);
}
else{
po = pow_mat(f, n - p);
}
g = g * po;
}
printf("%lld\n", g.m[0][0]);
}
return 0;
}

















 4670
4670

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









