




目的
本博客总结最近看的几篇关于深度学习的SLAM以及基于深度学习的稠密重建,简要对比记录特点
对比
| 年份 | 名称 | 类型 | 框图 | 前端 | 输出 | 地图 | 方法 | 特点 | 回环 |
|---|---|---|---|---|---|---|---|---|---|
| 2023 | Point-SLAM | RGBD-SLAM | 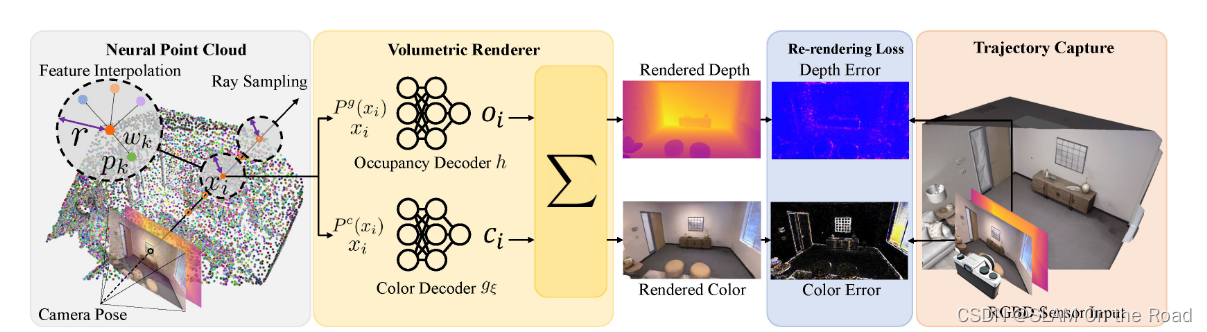 |
渲染的RGB和深度loss来优化pose和点的神经描述子 | 每帧pose和全局点云稠密地图 | 全局点云稠密地图 | 点云周围提取特征,MLP解码,渲染得到RGB和深度图像,loss优化位姿和点云神经描述子 | 没有回环 | |
| 2023 | DIM-SLAM | mono-VSLAM | 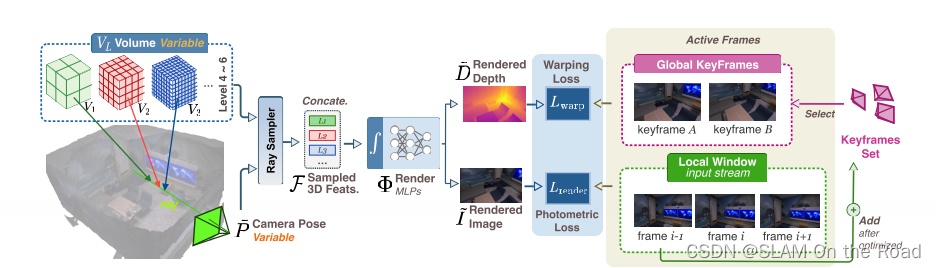 |
重投影patch损失+ RGB图像loss | 每帧的pose和最终的全局稠密地图 | 全局稠密地图 | 多分辨率特征网格+MLP解码器+ RGB损失+重投影多帧path的光流损失 |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 15万+
15万+





 到【灌水乐园】发言
到【灌水乐园】发言







