




 随着智能汽车技术的进步,传感器和ECU数量激增,带来了数据通信、实时处理和功能安全的挑战。域控作为关键组件,对算力、接口和功能安全有高要求。以车身控制为例,展示了传统向智能化演进的过程。
随着智能汽车技术的进步,传感器和ECU数量激增,带来了数据通信、实时处理和功能安全的挑战。域控作为关键组件,对算力、接口和功能安全有高要求。以车身控制为例,展示了传统向智能化演进的过程。
1、原因
首先是数量上的挑战。随着汽车的不断发展,特别是电动智能汽车越来越先进,汽车上的传感器、执行器、控制器成倍增加,需要成百上千的电子电气控制单元协同工作。比如智能驾驶所需的传感器,毫米波雷达、激光雷达、超声波雷达、摄像头,围绕车身一周分布,仅此一项就较传统汽车多出几十个。
其次是通信的要求。协同如此多的ECU,通信所产生的数据量是巨大的,而且不同的数据对通信的要求也是不一样的。海量的数据,再加上实时性、可靠性,必然需要分组处理。比如想要从摄像头获取道路实况,则需要定时传输多个摄像头的图像数据或特征到AI处理单元去分析,而一帧图像至少有几十kB数据。又比如驱动、转向、刹车,虽然数据量不大,但是实时性要求很高,可能需要每秒上千次的通信。
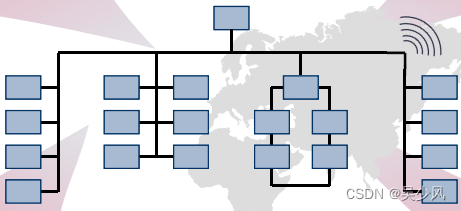
再次是网络变复杂的趋势。就像因特网的发展一样,最初几台主机互联,然后增加路由器、服务器,逐渐变成现在多层次的全球网络。分层使网络拓扑更清晰,布线更简洁,功能划分更合理,局部网络扩展不影响全局。
2、域控
算力。域控的功能可以总结为:与其它域控通信,综合域内控制单元反馈的信息,做出决策,并向域内的执行器发出控制指令。某些域控天然需要大算力,如智能座舱、智能驾驶。另一些为了降低域内节点的复杂度和成本,把大运算量的软件集中到域控执行,所以也可能需要大算力的芯片。总的来说,相比传统ECU,域控对算力的要求更高。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









