




 Voxel-FPN,一种来自海康威视的3D目标检测方法,通过多尺度体素特征提取和聚合实现高效检测。尽管结构简单,但在点云数据的3D检测中表现出色。论文探讨了Voxel Feature Extraction、Multi-scale Feature Aggregation和RPN-FPN组件,但实验表明加入4S尺度特征可能导致性能下降。对于SSD与FPN-RPN的比较,作者未提供清晰解释,引发了一些疑问和思考。
Voxel-FPN,一种来自海康威视的3D目标检测方法,通过多尺度体素特征提取和聚合实现高效检测。尽管结构简单,但在点云数据的3D检测中表现出色。论文探讨了Voxel Feature Extraction、Multi-scale Feature Aggregation和RPN-FPN组件,但实验表明加入4S尺度特征可能导致性能下降。对于SSD与FPN-RPN的比较,作者未提供清晰解释,引发了一些疑问和思考。
论文题目
Voxel-FPN: multi-scale voxel feature aggregation in 3D object detection from point clouds
该论文由海康威视出品,虽然结构简单,但效果就是好。排到了第三的位置上。
Voxel-FPN
整体框架如下,分为三个部分。

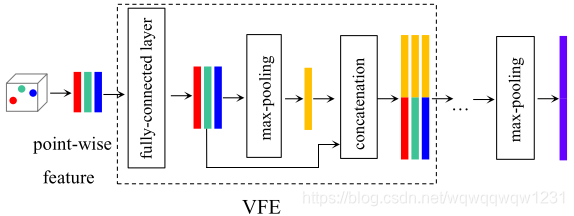
Voxel Feature Extraction
这部分的feature的extraction的方式是与VoxelNet一模一样的,具体见下图:
与VoxelNet不同是,在提取Voxel的feature的时候,就对多个尺度的Voxel进行了处理。分别为S,2S和4S,与传统的FPN不同,输入的图片只有最高分辨率的一张,本文相当于对输入的图片就行了下采样,与不同层的feature map相融合。
Multi-scale Feature Aggregation
得到的Voxel的feature其实还是一个四维的数据,但文中也没细说怎么处理,反正用的卷积核是2D卷积核,所以我认为是将同一位置不同高度的voxel的feature堆叠起来了。
具体的操作如下图:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1933
1933





 到【灌水乐园】发言
到【灌水乐园】发言







