




 本文介绍了I.MX6ULL的FlexCAN控制器如何遵循CAN2.0B协议,详细讲解了CAN总线的位时序结构,包括同步段、传播时间段、相位缓冲段以及Tq时间量子。重点讨论了如何通过位时序设置实现多单元采样和仲裁功能,确保数据传输的优先级。
本文介绍了I.MX6ULL的FlexCAN控制器如何遵循CAN2.0B协议,详细讲解了CAN总线的位时序结构,包括同步段、传播时间段、相位缓冲段以及Tq时间量子。重点讨论了如何通过位时序设置实现多单元采样和仲裁功能,确保数据传输的优先级。
一. 简介
前面文章学习了 CAN总线协议,即五种数据帧格式。
I.MX6ULL 带有 CAN 控制器外设,叫做 FlexCAN,FlexCAN 符合 CAN2.0B 协议。
本文来学习一下 CAN总线的位时序。
二. CAN总线位时序
CAN 总线以帧的形式发送数据,但是最终到总线上的就是 “0” 和 “1” 这样的二进制数据,这里就涉及到了通信速率,也就是每秒钟发送多少位数据,前面说了 CAN2.0 最高速度为 1Mbps/S。对于 CAN 总线,一个位分为 4 段:
① 同步段(SS)
② 传播时间段(PTS)
③ 相位缓冲段 1(PBS1)
④ 相位缓冲段 2(PBS2)
这些段由 Tq(Time Quantum)组成,Tq 是 CAN 总线的最小时间单位。帧由位构成,一个位由 4 个段构成,每个段又由若干个 Tq 组成,这个就是位时序。
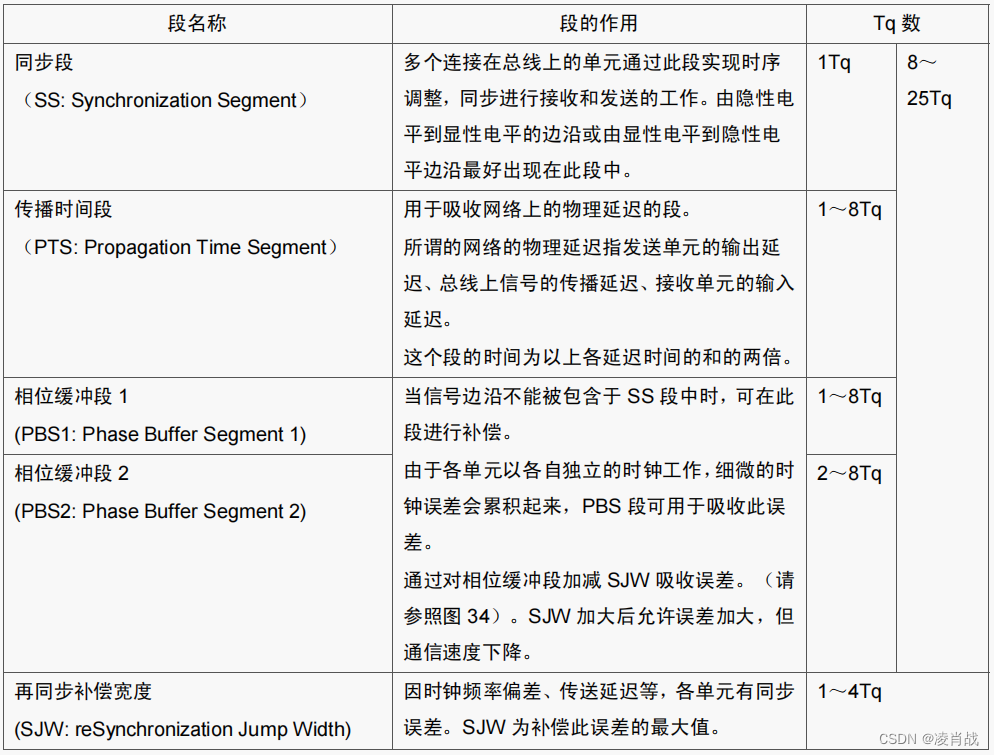
1 位由多少个 Tq 构成、每个段又由多少个 Tq 构成等,可以任意设定位时序。通过设定位时序,多个单元可同时采样,也可任意设定采样点。各段的作用和 Tq 数如下图所示:
1 个位的构成如下图所示:
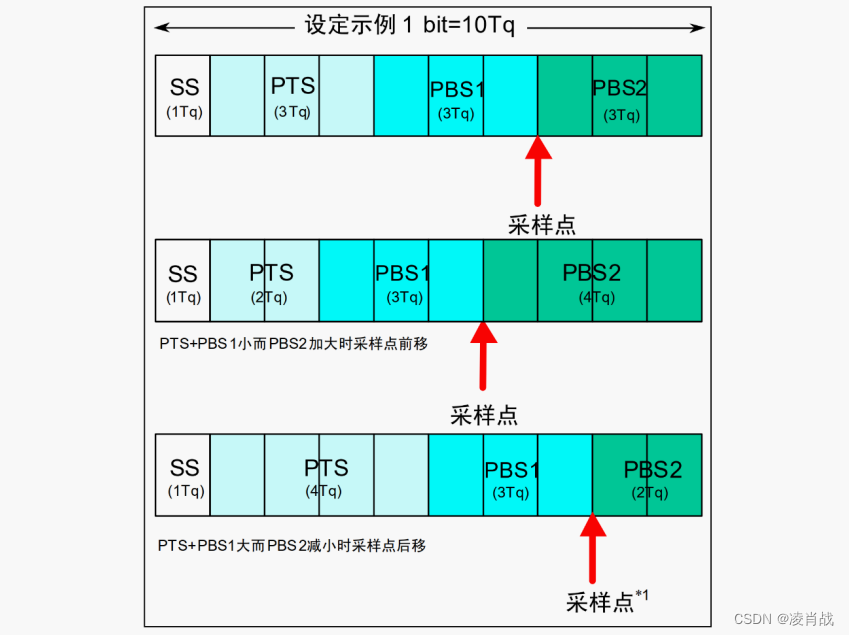
上图中的采样点是指读取总线电平,并将读到的电平作为位值的点。位置在 PBS1 结束处。根据这个位时序,我们就可以计算 CAN 通信的波特率了。具体计算方法,我们等下再 介绍,前面提到的 CAN 协议具有仲裁功能,下面我们来看看是如何实现的。
在总线空闲态,最先开始发送消息的单元获得发送权。
当多个单元同时开始发送时,各发送单元从仲裁段的第一位开始进行仲裁。连续输出显性电平最多的单元可继续发送实现过程,如下图 所示:
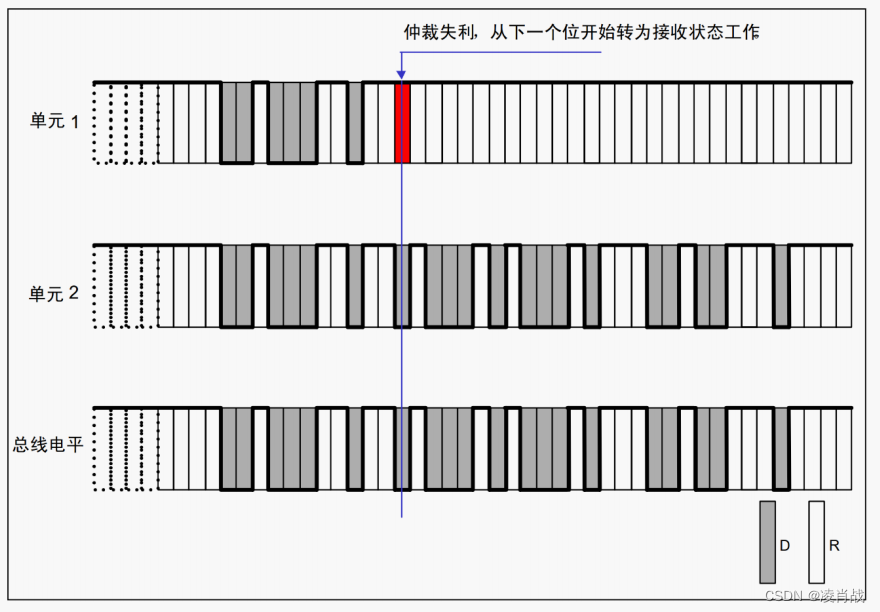
上图中单元 1 和单元 2 同时开始向总线发送数据,开始部分他们的数据格式是一 样的,故无法区分优先级,直到 T 时刻,单元 1 输出隐性电平,而单元 2 输出显性电平,此时单元 1 仲裁失利,立刻转入接收状态工作,不再与单元 2 竞争,而单元 2 则顺利获得总线使用权,继续发送自己的数据。
这就实现了仲裁,让连续发送显性电平多的单元获得总线使用权。
关于 CAN 协议就讲到这里,关于 CAN 协议更详细的内容请参考《CAN 入门教程》。

















 8056
8056

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









