



一种新型足踝加载装置在计算机断层扫描期间再现站立位负荷条件的能力
引言
站立位X光平片广泛用于评估扁平足等足部疾病。这是因为足部力线会随加载而变化,了解此条件下的骨动力学非常重要。然而,足部骨骼位于三维空间中,且在加载时力线以三维方式发生变化。因此,需要进行站立位CT以观察骨骼排列的微小变化。
然而,常规CT扫描仪要求患者处于仰卧位,无法对站立状态的患者进行扫描。为了准确反映骨动力学情况,我们设计了一种可用于现有CT扫描仪的加载装置,该装置可施加相当于患者体重的负载。在本研究中,我们旨在描述新研制的足底压力板,并评估该加载装置再现站立状态的能力。
材料与方法
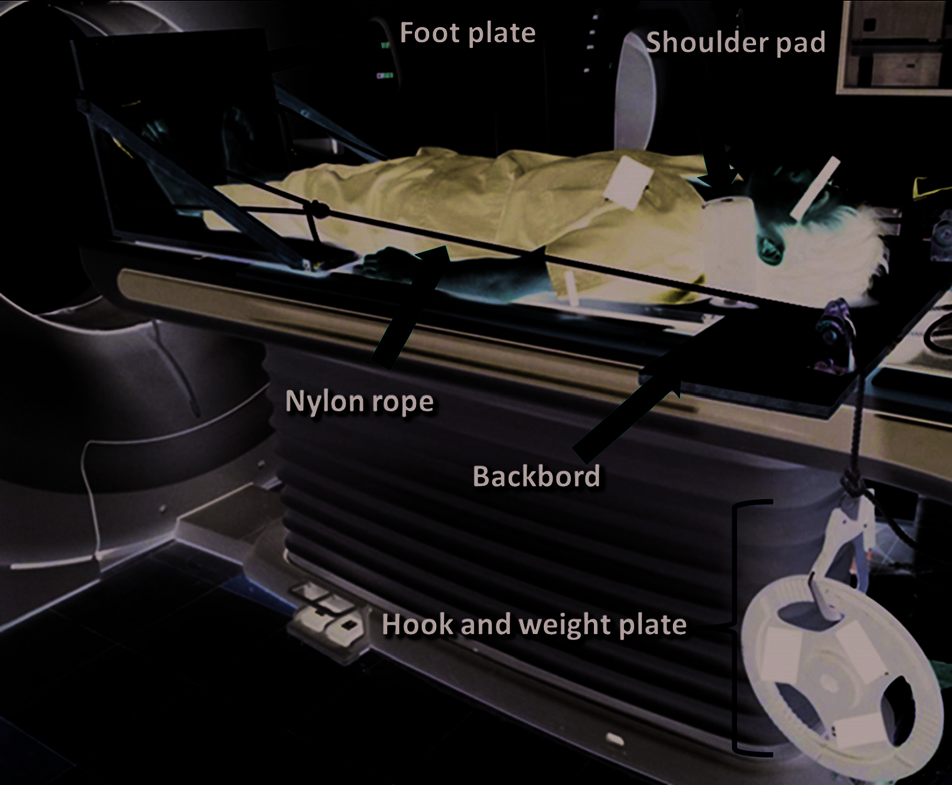
本研究已获得顺天堂大学医学院医学伦理委员会的批准。所有受试者均签署了知情同意书。2013年12月至2014年1月期间,对5名健康志愿者(3名男性和2名女性)的10只足部进行了研究,这些受试者均无足踝部疾病史且无足部疼痛。本研究团队研制的加载装置由三个主要部分组成:脚踏板、背板和肩垫(图1)。设计了一个L形脚板,用于在头侧方向对足底施加轴向载荷。为防止CT扫描过程中产生眩光,在靠近足部和踝部的区域未使用金属材料,而是采用高强度木材胶黏剂、塑料板和木销来组装该装置。背板上安装了两个肩垫,使肩部能够支撑施加到足底的载荷。一根可承受高达1000千克载荷的9毫米直径尼龙绳穿过脚踏板上的孔,然后穿过安装在背板头侧方向的滑轮,并垂悬至计算机断层扫描仪平台的一侧。绳子末端连接一个钩子,配重片悬挂于该钩子上以重现负荷条件(图1)。
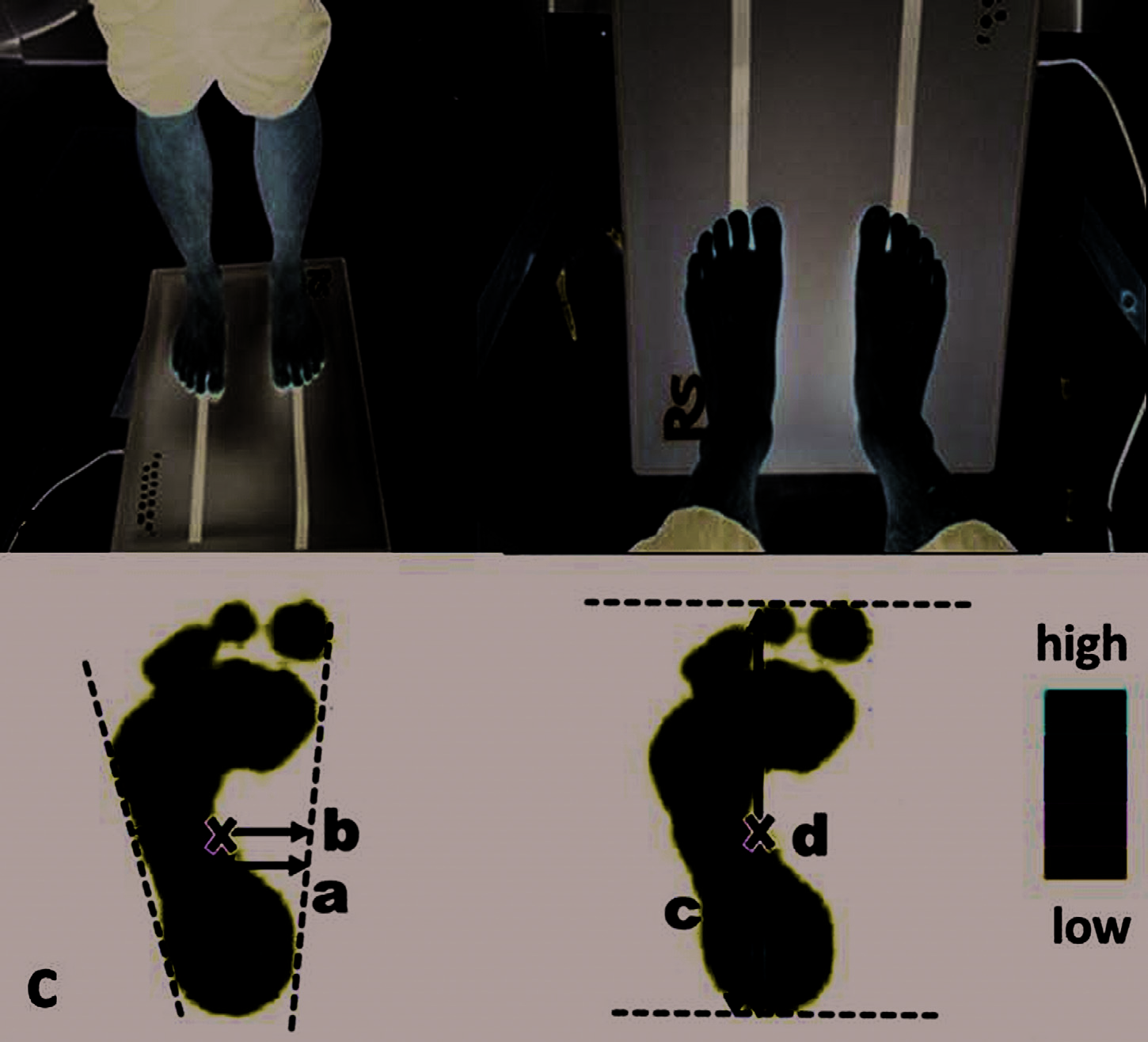
首先,在站立状态下测量每位受试者的体重,并使用足底扫描板(比利时奥伦RSscan公司)测量足底压力等参数。在足底扫描板上画一条线,使足跟轴线与第二趾对齐,并在站立状态下测量足底接触面积、足底压力以及压力中心的位置(图2(a))。
接下来,受试者被要求以仰卧位躺在加载装置上,双腿伸直,踝关节处于中立位。然后将一个秤放置在脚踏板和足底之间。通过绳子连接的钩子悬挂配重片,直到负载达到受试者体重的约±10%。记录重量后,移除秤,在脚踏板和足底之间放置footscan,并在站立期间进行的相同测量被再次执行(图 2(b))。足底接触面积的测量不仅包括整个足部的接触面积(cm²),还包括前足、中足和后足各自占总体面积的百分比。同样,总体以及前足、中足和后足的足底压力(N/cm²)也被分别计算。压力中心的测量采用Watanabe等人所述的方法 [1](图 2(c))。
每位受试者在每种条件下均进行五次测量,并记录平均值。使用配对t检验评估站立与负重测量之间的差异。对于每次检验,统计显著性水平设定为 P < 0.05。
结果
测量完成后进行的调查中,没有受试者抱怨使用加载装置时出现疼痛或不适。负重测量与站立状态测量的差异如下:足底接触面积,−4.2 cm²;以及接触百分比(前足/中足/后足),−0.7%/ −0.2%/0.8%。足底压力变化分别为 −1.47 N/cm² / −0.49 N/cm² / 3.7 N/cm²(总体为6.40 N/cm²)。后足所占接触面积和足底压力的百分比较高。根据现有数据,未检测到显著差异。压力中心位置在前后方向上偏移0.9%,在内外侧向上偏移0.3%(表1)。
| 表1 测量值 | 站立 | 使用加载装置 | P值 |
|---|---|---|---|
| 足底接触面积 (cm²) | 132.8 ± 18.0 | 128.6 ± 23.5 | P = 0.212 |
| 接触百分比(%) 前足 | 53.5 ± 1.7 | 52.8 ± 3.3 | P = 0.614 |
| 中足 | 25.4 ± 2.5 | 25.2 ± 2.9 | P = 0.895 |
| 后足 | 21.1 ± 1.7 | 21.9 ± 1.9 | P = 0.254 |
| 足底压力 (N/cm²) 总体 | 46.5 ± 12.9 | 48.3 ± 16.5 | P = 0.209 |
| 前足 | 20.5 ± 9.4 | 19.1 ± 9.7 | P = 0.748 |
| 中足 | 2.1 ± 0.7 | 1.6 ± 0.6 | P = 0.196 |
| 后足 | 25.9 ± 4.4 | 27.6 ± 8.2 | P = 0.102 |
| 压力中心位置(%) 前后方向 | 50.7 ± 1.8 | 51.6 ± 3.7 | P = 0.359 |
| 内外侧向 | 48.9 ± 7.8 | 49.3 ± 8.3 | P = 0.440 |
| ## 讨论 |
已有多项研究使用加载装置对足踝进行CT成像(表2),但很少有研究评估该加载装置在多大程度上能够再现站立状态下的加载条件[5]。在临床环境中,诊断性X光通常是在患者站立位时获取的。因此,我们建议CT扫描应在尽可能接近站立位X射线的条件下进行。
卡什米尔等人研究了坐位、站立和行走条件下内侧纵弓的长度、高度和距上舟角,发现坐位与站立之间存在显著差异[6]。由于坐位是一种部分负重姿势,在研究足部骨动力学时,对受试者施加接近其体重的负荷非常重要。因此,我们创建了一种条件,使其能够施加约等于受试者体重的负荷。
在一项关于内侧纵弓静态特性的研究中,梅木等人[7]指出,当在坐位、膝关节屈曲90度时,将加载力垂直施加于足部,小腿和足部肌肉(胫骨前肌、腓骨长肌、小腿三头肌、拇长屈肌和拇展肌)并未参与活动。然而,在站立位且膝关节伸展时,观察到小腿和足部肌肉的活动。在讨论加载状态下骨排列变化时,即使试图准确再现站立位,小腿和足部肌肉的活动也不可忽视。本研究中的负重状态使受试者能够在膝盖关节自然伸展的姿势下进行扫描。
该设备以低成本满足了在膝关节伸展状态下对受试者施加约等于其体重负荷的两个条件。鉴于在临床环境中,我们认为小于10%的差异并不代表实际差异,根据现有数据,在足底接触面积、足底压力以及压力中心位置方面,站立状态与负重状态之间均未检测到显著差异。这些结果表明,该设备能够很好地再现站立状态。
本研究存在一些局限性。首先,受试者数量较少。其次,尽管使用足底压力板未检测到显著差异,但在实际的站立位CT中可能会出现一些差异。第三,受试者仅包括健康志愿者。下肢关节屈曲挛缩的患者可能难以在加载装置上以仰卧位姿势伸直双腿并将踝关节保持在中立位置。第四,为了尽量减少对受试者的辐射暴露,我们未记录加载引起的骨排列变化。
我们的设备可用于比较足部疾病患者在加载条件下发生力线变化的计算机断层扫描图像。此外,对计算机断层扫描数据的分析有可能在三维上评估骨动力学,而这是普通X射线无法实现的,并可能有助于选择或开发更优的手术方法。
| 表2 足踝CT成像的加载装置 |
|---|
| 作者(年份) |
| Ananthakrisnan 等 2 |
| Ledoux 等人 3 |
| Ferri 等人 4 |
| Watanabe 等人 1 |
| Kido 等人 5 |
| 木村等人(本研究) |


















 239
239

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









