




 本文介绍了如何在Java中利用辅助栈设计一个数据结构,实现在push、pop、top和min操作上达到常数时间复杂度,重点讲解了辅助栈在存储和获取栈中最小元素的应用.
本文介绍了如何在Java中利用辅助栈设计一个数据结构,实现在push、pop、top和min操作上达到常数时间复杂度,重点讲解了辅助栈在存储和获取栈中最小元素的应用.
描述
定义栈的数据结构,请在该类型中实现一个能够得到栈中所含最小元素的min函数,并且调用 min函数、push函数 及 pop函数 的时间复杂度都是 O(1)
push(value):将value压入栈中
pop():弹出栈顶元素
top():获取栈顶元素
min():获取栈中最小元素
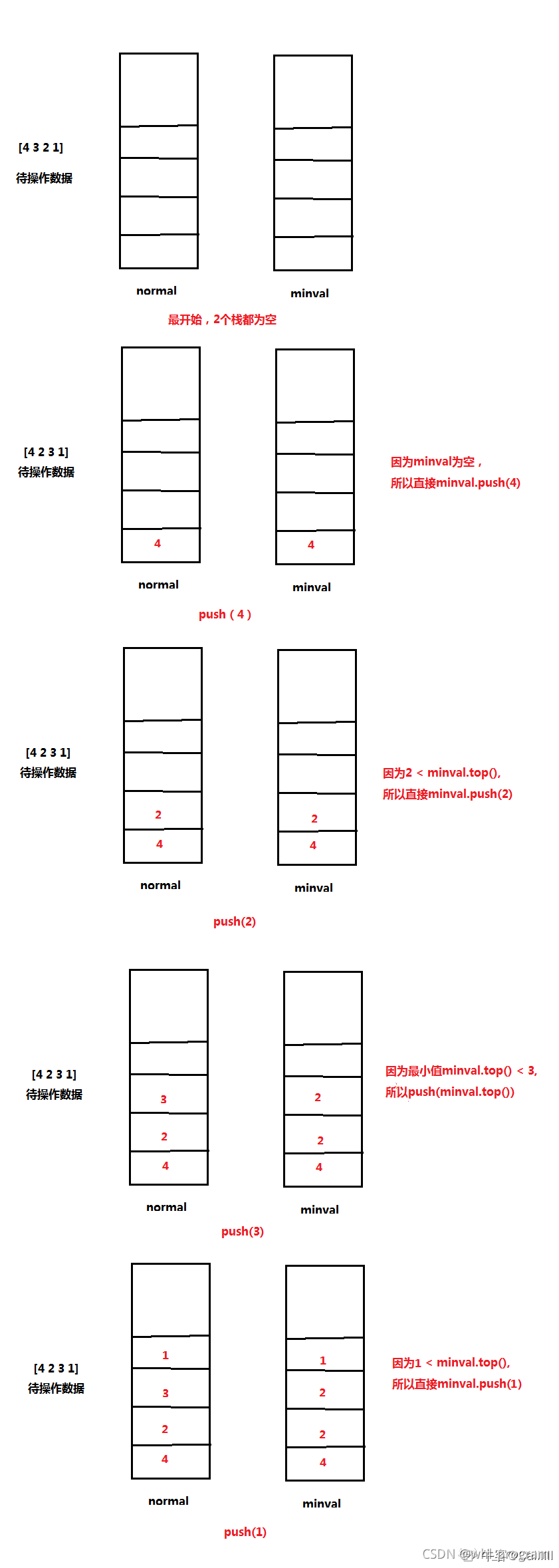
思路:
使用辅助栈,专门存放最小值
代码
import java.util.Stack;
public class Solution {
Stack<Integer> stack = new Stack<Integer>();
Stack<Integer> minStack = new Stack<Integer>();
public void push(int node) {
stack.push(node);
if(minStack.isEmpty()) {
minStack.push(node);
} else {
if(node < minStack.peek()) {
minStack.push(node);
} else {
minStack.push(minStack.peek());
}
}
}
public void pop() {
stack.pop();
minStack.pop();
}
public int top() {
return stack.peek();
}
public int min() {
return minStack.peek();
}
}

















 169
169

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









