



一款高性能兼容CANoe的USB CANFD接口卡
产品概述
在汽车产品领域,CAN和CANFD是最重要和最基础的通信总线。
基于CAN/CANFD的应用开发、仿真测试和功能验证是产品研发和产品测试的重要工作内容。

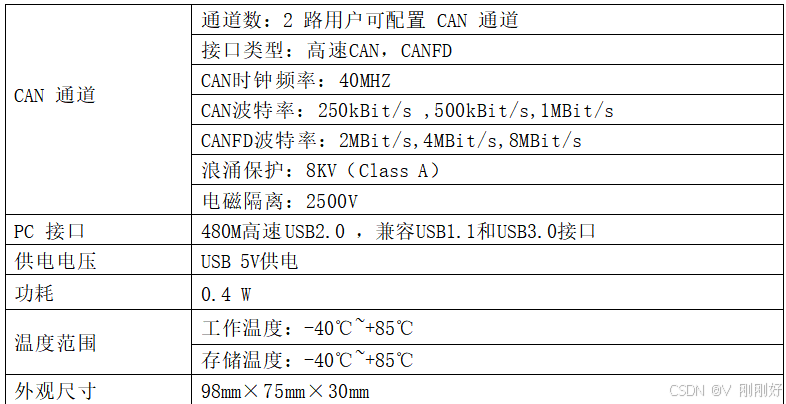
CUBE魔方CN1620A是一个款国产高性能的USB CAN卡,支持双路CAN和CANFD,最大支持8MHZ的CANFD。
CUBE CN1620A支持480M USB通信,支持2路CAN和CANFD;主控采用STM32H730芯片,主频550MHZ,Arm Cortex-M7内核。强大的硬件性能保障CAN总线数据采集和处理的实时性和高带宽传输能力。CAN采集从总线到PC应用软件处理,时延控制在2ms以内。两路CAN总线同时96%总线负载采集时,高带宽的USB能保证数据不丢帧。
CUBE CN1620A的硬件在USB接口、CAN总线接口、金属外壳等对外接触处都进行了ESD的静电保护设计,满足±8Kv的静电放电不会损坏产品。
CUBE CN1620A的硬件在USB接口进行了电流过流保护,防止电脑USB接口在短路时被损坏。
CUBE CN1620A的双路CAN总线和主控之间采用了电源隔离和数字隔离的完全隔离。采用金升阳2500V的隔离电源,ADM的高带宽数字隔离芯片。
CUBE CN1620A支持 Busmater软件,支持CANoe软件
产品的规格书
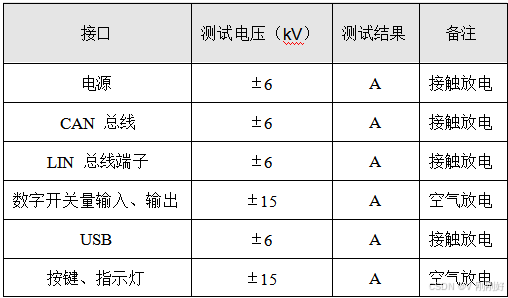
防护等级
静电放电抗扰度试验 IEC61000-4-2
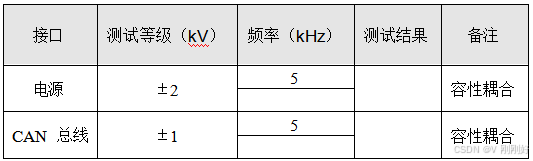
电快速瞬变脉冲群抗扰度试验 IEC61000-4-4
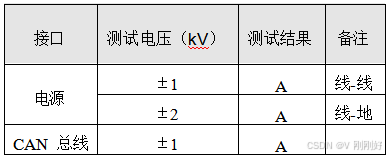
防护等级-浪涌(冲击)试验 IEC61000-4-5
Busmaster的使用性能测试
CUBE CN1620A和PCAN通过120欧电阻直连。
CANFD测试波特率500K 数据域波特率 2M 。
测试PC软件PCAN-VIEW和BUSMASTER。

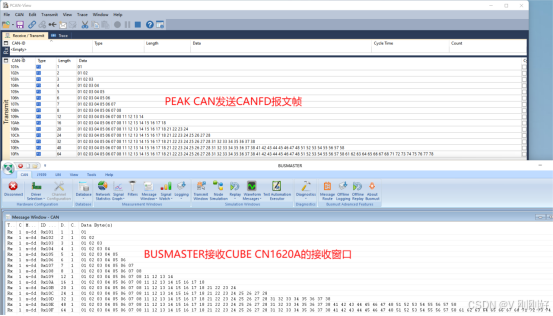
CANFD数据的发送和接收
Cube CN1620A发送和接收CANFD的数据,所有数据类型的CANFD报文都正常。
下图为PCAN-VIEW和BUSMASTER的监控CANFD报文数据。
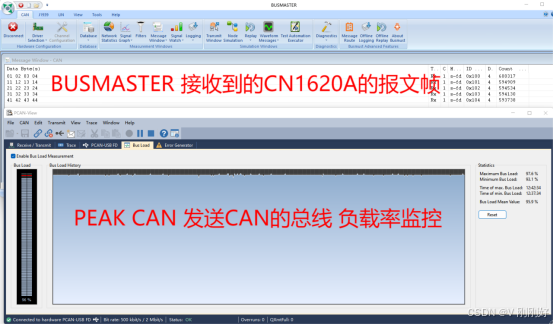
CAN的总线满负载测试
使用PCAN发送DLC分别为DLC=4的5条CAN报文,96%以上,长时间压力测试无丢包。
下图为PCAN-VIEW的总线负载监控和BUSMASTER的接收监控。
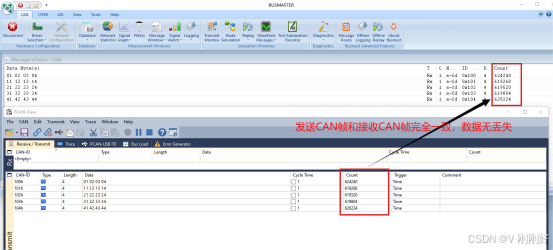
下图为PCAN停止发送后,BUSMASTER的接收CAN和PCAN-VIEW的发送CAN帧数一致。
CANoe的使用性能测试
CUBE CN1620A和PCAN通过120欧电阻直连。
CANFD测试波特率500K 数据域波特率 2M 。
测试PC软件CANoe、CANoeRT和PCAN-View。

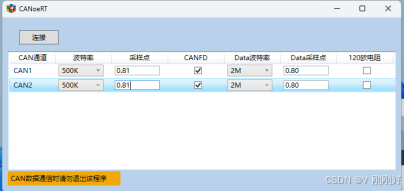
启动CANoeRT并设置CAN总线波特率,然后连接。
CANoeRT为CANoe RunTime ,作为CANoe和CUBE CN1602A的数据路由转发。
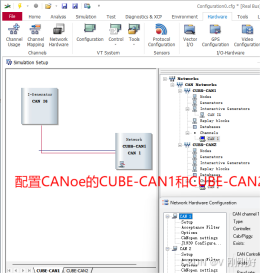
创建一个2路CAN的CANoe工程,并在CAN1上创建一个CAN IG网络节点。
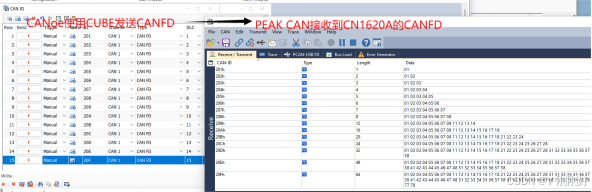
CANFD数据的发送和接收
CANFD的传输延时
将CUBE CN1620A的CAN1和CAN2连接,使用CANoe在CAN1发送数据,CANoe的CAN2将接收到数据,计算发送和接收的时间差,传输延时小于2ms.

CAN总线满负载的丢帧率测试
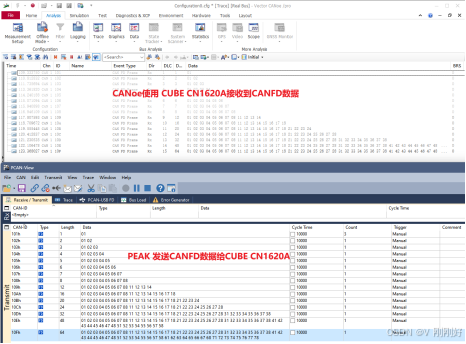
PCAN发送高负载CANFD帧数据,CANoe使用CUBE CN1620A的接收数据。
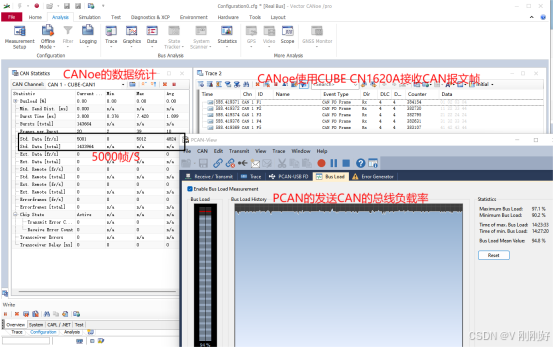
比较CAN满负载的总线是否丢帧


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









