






一、基础部分
1.1 复杂度
可参考学习复杂度 - OI Wiki (oi-wiki.org)
二、蛮力法
2.1 原理
蛮力法也称穷举法(枚举法)或暴力法,是一种简单的直接解决问题的方法,通常根据问题的描述和所涉及的概念定义,对问题所有可能的状态(结果)一一进行测试,直到找到解或将全部可能的状态都测试一遍为止。
2.2 排序问题
2.2.1 选择排序
可参考学习选择排序 - OI Wiki (oi-wiki.org)
1)思想:每一趟从待排序的数据元素中选出最小(或最大)的一个元素,顺序放在已排好序的数列的最后,直到全部待排序的数据元素排完。
2)时间复杂度:对任何输入来说,选择排序都是一个 O ( n 2 ) O(n^2) O(n2)的算法。但键的交换次数仅为 O ( n ) O(n) O(n),这个特性使得选择排序由于许多其他的排序算法
2.2.2 冒泡排序
可参考学习1.1 冒泡排序 | 菜鸟教程 (runoob.com)
1)思想:从前到后(即从下标较小的元素开始)依次比较相邻元素的值,若发现逆序则交换位置,使值较大的元素逐渐从前移向后部。
2)时间复杂度:对于所有规模为n的数组来说,该冒泡排序的键值比较次数都是相同的, C ( n ) = n ( n − 1 ) 2 C(n)=\frac{n(n-1)}{2} C(n)=2n(n−1),但它的键交换次数取决于特定的输入。在序列完全有序时,冒泡排序只需遍历一遍数组,不用执行任何交换操作,时间复杂度为 O ( n ) O(n) O(n),在最坏情况下,冒泡排序要执行 n ( n − 1 ) 2 \frac{n(n-1)}{2} 2n(n−1)次交换操作,时间复杂度为 O ( n 2 ) O(n^2) O(n2) 。
2.3 查找问题
2.3.1 顺序查找
1)思想:简单地将给定列表中的连续元素和给定的查找键进行比较,直到遇到一个匹配的元素(成功查找),或者在遇到匹配元素前遍历了整个列表(失败查找)
2)时间复杂度:顺序查找是阐释蛮力法很好的工具,无论是在最差情况还是平均情况下,该算法仍然是一个线性算法。
2.3.2 蛮力字符串匹配
1)思想:将模式对准文本的前m个字符,然后从左到右匹配每一对相应的字符,直到m对字符全部匹配(算法就可以结束了)或者遇到一对不匹配的字符。在后一种情况下,模式向右移一位,然后从模式的第一个字符开始,继续把模式和文本中的对应字符进行比较。注意,最后一轮子串匹配的起始位置是n-m(假设文本位置的下标是从0到n-1)

2)时间复杂度:最坏的情况下,时间复杂度为
O
(
n
m
)
O(nm)
O(nm);但事实上在查找随机文本时,时间复杂度为
O
(
n
)
O(n)
O(n)

2.4 最近对问题
1)概述:最近对问题要求在一个包含n个点的集合中,找出距离最近的两个点 d ( p i , p j ) = ( x i − x j ) 2 − ( y i − y j ) 2 d(p_i,p_j)=\sqrt{(x_i-x_j)^2-(y_i-y_j)^2} d(pi,pj)=(xi−xj)2−(yi−yj)2
2)算法:分别计算每一对点之间的距离,然后找出距离最小的那一对。为了避免对同一对点计算两次距离,只考虑 i < j i\lt j i<j的那些 d ( p i , p j ) d(p_i,p_j) d(pi,pj)

3)时间复杂度: O ( n 2 ) O(n^2) O(n2)
2.5 凸包问题
可参考学习:凸包 - OI Wiki (oi-wiki.org)
1)概述:在平面或者高维空间的一个给定点集合中寻找凸包。
定义1:对于平面上的一个点集合(有限的或无限的)如果以集合中任意两点p和q为端点的线段都属于该集合,我们说这个集合时凸的。
定义2:一个点集合S的凸包是包含S的最小(S的凸包一定是所有包含S的凸集合的子集)凸集合。即是说对于平面上n个点的集合,他的凸包就是包含所有这些点(或者在内部,或者在边界上)的最小凸多边形。
2)算法:对于一个n个点集合中的两个点,当且仅当该集合中的其他点都位于穿过这两点的直线的同一边时,他们的连线是该集合凸包边界的一部分,对每一对点都做一遍检验之后,满足条件的线段构成了该凸包的边界。
检验是否位于这条直线的同一边:把每一个点代入 a x + b y − c ( a = y 2 − y 1 , b = x 1 − x 2 , c = x 1 y 2 − y 1 x 2 ) ax+by-c(a=y_2-y_1,b=x_1-x_2,c=x_1y_2-y_1x_2) ax+by−c(a=y2−y1,b=x1−x2,c=x1y2−y1x2),其中点 ( x 1 , y 1 ) , ( x 2 , y 2 ) (x_1,y_1),(x_2,y_2) (x1,y1),(x2,y2)为直线上的点
3)时间复杂度: O ( n 3 ) O(n^3) O(n3)
2.6 穷举查找
2.6.1 原理
生成问题域中的每一个元素,选出其中满足问题约束的元素,然后再找出一个期望元素。
2.6.1 旅行商问题
1)概述:找出一条n个给定的城市间的最短路径,使我们在回到出发的城市之前,对每个城市都只访问一次。
2)时间复杂度: O ( n ! ) O(n!) O(n!)
2.6.2 背包问题
1)概述:给定n个重量为 w 1 , w 2 , … … w n w_1,w_2,……w_n w1,w2,……wn,价值为 v 1 , v 2 , … … , v n v_1,v_2,……,v_n v1,v2,……,vn的物品和一个承重为W的背包,求这些物品中一个最有价值的子集,并且要能够装到背包中。
2)时间复杂度: Ω ( 2 n ) \Omega(2^n) Ω(2n)
2.6.3 分配问题
1)概述:有n个任务需要分配给n个人执行,一个任务对应一个人(每个任务只分配个一个人,每个人只分配一个任务)。对于每一对i,j=1,2,……,n来说,将第j个任务分配给第i个人的成本是C[i,j]。该问题要找出总成本最小的分配方案。
2)时间复杂度: O ( n ! ) O(n!) O(n!)
2.7 图遍历算法
2.7.1 深度优先查找
可参考学习:01. 图的深度优先搜索知识 | 算法通关手册(LeetCode) (itcharge.cn)
1)思想:从起始节点开始,沿着一条路径尽可能深入地访问节点,直到无法继续前进时为止,然后回溯到上一个未访问的节点,继续深入搜索,直到完成整个搜索过程。

2)时间复杂度:
对于邻接矩阵表示法: Θ ( ∣ V ∣ 2 ) \Theta(|V|^2) Θ(∣V∣2);
对于邻接链表表示法: Θ ( ∣ V ∣ + ∣ E ∣ ) \Theta(|V|+|E|) Θ(∣V∣+∣E∣),其中|V|和|E|分别是图的顶点和边的数量
2.7.2 广度优先查找
可参考学习:03. 图的广度优先搜索知识 | 算法通关手册(LeetCode) (itcharge.cn)
1)思想:从起始节点开始,逐层扩展,先访问离起始节点最近的节点,后访问离起始节点稍远的节点。以此类推,直到完成整个搜索过程。

2)时间复杂度:
对于邻接矩阵表示法: Θ ( ∣ V ∣ 2 ) \Theta(|V|^2) Θ(∣V∣2);
对于邻接链表表示法: Θ ( ∣ V ∣ + ∣ E ∣ ) \Theta(|V|+|E|) Θ(∣V∣+∣E∣),其中|V|和|E|分别是图的顶点和边的数量
三、减治法
3.1 原理
同样是将一个大问题划分为若干个小的子问题,但是这些子问题不需要分别求解,只需要求解其中一个子问题便可,因此也不需要对子问题进行合并,可以说,减治法是一种退化版的分治法。
减治法可分为3种:
- 问题规模减去一个常量
- 问题规模减去常数因子
- 问题规模减去可变因子
3.2 插入排序
参考学习插入排序 - OI Wiki (oi-wiki.org)
1)思想:将第一待排序序列第一个元素看做一个有序序列,把第二个元素到最后一个元素当成是未排序序列。从头到尾依次扫描未排序序列,将扫描到的每个元素插入有序序列的适当位置。(如果待插入的元素与有序序列中的某个元素相等,则将待插入元素插入到相等元素的后面。)

2)时间复杂度:
对于有序数组: Θ ( n ) \Theta(n) Θ(n)
平均效率: Θ ( n 2 ) \Theta(n^2) Θ(n2)
3.3 拓扑排序
可参考学习拓扑排序详解(包含算法原理图解、算法实现过程详解、算法例题变式全面讲解等)-阿里云开发者社区 (aliyun.com)
1)思想:对一个有向无环图G进行拓扑排序,是将G中所有顶点排成一个线性序列,使得图中任意一对顶点u和v,若边∈E(G),则u在线性序列中出现在v之前。通常,这样的线性序列称为满足拓扑次序的序列,简称拓扑序列。简单的说,由某个集合上的一个偏序得到该集合上的一个全序,这个操作称之为拓扑排序。

3.4 生成组合对象的算法
3.4.1 生成排列
1)概述:研究数1,2,……,n生成所有的排列问题
2)算法:
如果元素k的箭头指向一个相邻的较小元素,我们说他在这个以箭头标记的排列中是移动的
【Johnson-Trotter算法】

【字典序】


3)时间复杂度:Johnson-Trotter算法: O ( n ! ) O(n!) O(n!)
3.4.2 生成子集
1)概述:生成抽象集合A的所有子集
3.5 减常因子算法
3.5.1 原理
减治法的第二种主要变化形式(问题规模减去常数因子)
3.5.2 折半查找
可参考学习01. 二分查找知识(一) | 算法通关手册(LeetCode) (itcharge.cn)
1)思想:通过比较查找键K和数组中间元素A[m]来完成查找工作。如果他们相等,算法结束。否则,如果K<A[m],就对数组的前半部分执行该操作,如果K>A[m],则对数组的后半部分执行该操作。

2)时间复杂度:
最差情况: Θ ( l o g n ) \Theta(logn) Θ(logn)
最优情况: Θ ( 1 ) \Theta(1) Θ(1)
3.5.3 假币问题
1)概述:在n枚外观相同的硬币中,有一枚是假币。在一架天平上,可以比较任意两组硬币,通过观察天平是右倾、左倾、停在中间来判断两组硬币的重量。设计一个高效的算法来检测这枚假币。
2)算法:把n枚硬币分成两堆,每堆有n/2枚硬币。如果n为奇数,就留下一枚额外的硬币,然后把两堆硬币放在天平上。如果两堆硬币重量相同,那么放在旁边的硬币就是假币;否则可以用同样的方法对较轻的一堆硬币进行处理,这堆硬币中一定包含那枚假币。
3)时间复杂度: Θ ( l o g 2 n ) \Theta(log_2n) Θ(log2n)
3.5.4 俄式乘法
1)思想:它是对两个正整数相乘的非主流算法。假设m和n是两个正整数,我们要计算它们的乘积。
它的主要原理如下:
当n为偶数时: n × m = n 2 × 2 m n \times m=\cfrac n2 \times 2m n×m=2n×2m
当n为奇数时: n × m = n − 1 2 × 2 m + m n \times m=\cfrac {n-1}2 \times 2m + m n×m=2n−1×2m+m
并以 1 × m = m 1 \times m=m 1×m=m作为结束条件。

3.5.5 约瑟夫斯问题
1)概述:N个人围成一圈,从第一个开始报数,第M个将被杀掉,最后剩下一个,其余人都将被杀掉。这个问题就是要求算出幸存者的号码J(n)
据说著名犹太历史学家Josephus(弗拉维奥·约瑟夫斯)有过以下的故事:在罗马人占领乔塔帕特后,39 个犹太人与Josephus及他的朋友躲到一个洞中,39个犹太人决定宁愿死也不要被敌人抓到,于是决定了一个自杀方式,41个人排成一个圆圈,由第1个人开始报数,每报数到第3人该人就必须自杀,然后再由下一个重新报数,直到所有人都自杀身亡为止。然而Josephus 和他的朋友并不想遵从。首先从一个人开始,越过k-2个人(因为第一个人已经被越过),并杀掉第k个人。接着,再越过k-1个人,并杀掉第k个人。这个过程沿着圆圈一直进行,直到最终只剩下一个人留下,这个人就可以继续活着。问题是,给定了和,一开始要站在什么地方才能避免被处决。Josephus要他的朋友先假装遵从,他将朋友与自己安排在第16个与第31个位置,于是逃过了这场死亡游戏。
2)算法:参考学习约瑟夫问题 - OI Wiki (oi-wiki.org)
3.6 减可变规模算法
3.6.1 原理
减治法的第三种主要变化形式(问题规模减去可变因子)
3.6.2 插值查找
可参考学习插值查找 - 算法与复杂度 | 小白·菜的空间 (infinityglow.github.io)
1)思想:不同于折半查找总是把查找键和给定有序数组的中间元素进行比较,插值查找为了找到用来和查找键进行比较的数组元素,考虑了查找键的值。例如在字典查找单词yell时,总是会翻到靠近结尾的地方,而不是翻到开头处。
2)时间复杂度
3.6.3 二叉查找树的查找和插入
1)概念
- 每个节点一个元素
- 所有左子树的元素都小于子树根节点的元素
- 所有右子树的元素都大于子树根节点的元素(
左小右大)
2)时间复杂度:查找/插入一颗由n个随机键构造起来的二叉查找树: Θ ( l o g n ) \Theta(logn) Θ(logn)
3.6.4 拈游戏
【单堆拈游戏】
1)概述:现在只有一堆n个棋子,两个玩家轮流从堆中拿走最少1个,最多m个棋子。每次拿走的棋子数都可以不同,但能够拿走的上下限数量是不变的。如果每个玩家都做出了最佳选择,哪个玩家能够胜任拿到最后那个棋子?是先走的还是后走的
2)算法:当且仅当n不是m+1的倍数时,n个棋子的实例是一个胜局。胜利的策略是在每次拿走n mod (m+1)个棋子;如果背离这个策略,则会把胜局留给对手。
【拈游戏】

四、分治法
4.1 原理
将一个大问题划分为若干个子问题,分别求解后将子问题的解进行合并得到原问题的解。
许多分治算法的时间效率T(n)满足方程T(n)=aT(n/b)+f(n)。主定理确定了该方程解的增长次数。
4.2 归并排序
可参考学习05. 归并排序 | 算法通关手册(LeetCode) (itcharge.cn)
1)思想:先递归地将当前数组平均分成两半,然后将有序数组两两合并,最终合并成一个有序数组。
归并排序的实现有两种方法:
- 自上而下的递归;
- 自下而上的迭代;
2)步骤:
- 申请空间,使其大小为两个已经排序序列之和,该空间用来存放合并后的序列;
- 设定两个指针,最初位置分别为两个已经排序序列的起始位置;
- 比较两个指针所指向的元素,选择相对小的元素放入到合并空间,并移动指针到下一位置;
- 重复步骤 3 直到某一指针达到序列尾;
- 将另一序列剩下的所有元素直接复制到合并序列尾。
3)时间复杂度: O ( n l o g n ) O(nlogn) O(nlogn)
4.3 快速排序
可参考学习06. 快速排序 | 算法通关手册(LeetCode) (itcharge.cn)
1)思想:选择数组中某个元素作为基准数,通过一趟排序将数组分为独立的两个子数组,一个子数组中所有元素值都比基准数小,另一个子数组中所有元素值都比基准数大。然后再按照同样的方式递归的对两个子数组分别进行快速排序,以达到整个数组有序。
2)时间复杂度:
最优情况: O ( n l o g n ) O(nlogn) O(nlogn)
最差情况: O ( n 2 ) O(n^2) O(n2)
4.4 二叉树遍历及其相关特性
1)定义:我们把二叉树定义为若干节点的一个有限集合,他要么为空,要么由一个根和两颗称为 T L T_L TL和 T R T_R TR的不相交二叉树构成,这两颗二叉树分别为根的左右子树。我们常常认为二叉树是有序树的一种特例,见下图。

2)三种遍历算法:
- 前序遍历:根—>左子树—>右子树
- 中序遍历:左子树—>根—>右子树
- 后序遍历:左子树—>右子树—>根
3)伪代码:
算法 Height(T)
//递归计算二叉树的高度
//输入:一棵二叉树T
//输出:T的高度
if T=0 return -1
else return max{Height(T_left),Height(T_right)}+1
4)完全二叉树:一种每个节点仅具有0个或2个子女的二叉树。
4.5 大整数乘法
参考学习【算法】大数乘法问题及其高效算法 - 夏尔_717 - 博客园 (cnblogs.com)
1)概述:对超过100位的乘法十进制整数进行乘法运算时,由于这样的整数过于长,现代计算机的一个字是装不下的,因此就需要对他们做特别的处理。
2)算法:
对于任何两位数 a = a 1 a 0 a=a_1a_0 a=a1a0和 b = b 1 b 0 b=b_1b_0 b=b1b0来说,他们的的积c可以用下列公式来计算: c = a × b = c 2 1 0 2 + c 1 1 0 1 + c 0 c=a\times b=c_210^2+c_110^1+c_0 c=a×b=c2102+c1101+c0,其中 c 2 = a 1 × b 1 c_2=a_1\times b_1 c2=a1×b1是他们第一个数字的积; c 0 = a 0 × b 0 c_0=a_0\times b_0 c0=a0×b0,是他们第二个数字的积; c 1 = ( a 1 + a 0 ) × ( b 1 + b 0 ) − ( c 2 + c 0 ) c_1=(a_1+a_0)\times (b_1+b_0)-(c_2+c_0) c1=(a1+a0)×(b1+b0)−(c2+c0);
对于n位整数,其中n是偶数而言,则有 c = a × b = ( a 1 1 0 n / 2 + a 0 ) × ( b 1 1 0 n / 2 + b 0 ) = ( a 1 × b 1 ) 1 0 n + ( a 1 × b 0 + a 0 × b 1 ) 1 0 n / 2 + ( a 0 × b 0 ) = c 2 1 0 n + c 1 1 0 n / 2 + c 0 c=a\times b=(a_110^{n/2}+a_0) \times (b_110^{n/2}+b_0)=(a_1 \times b_1)10^n+(a_1 \times b_0+a_0 \times b_1)10^{n/2}+(a_0 \times b_0)=c_210^n+c_110^{n/2}+c_0 c=a×b=(a110n/2+a0)×(b110n/2+b0)=(a1×b1)10n+(a1×b0+a0×b1)10n/2+(a0×b0)=c210n+c110n/2+c0,其中 c 2 = a 1 × b 1 c_2=a_1\times b_1 c2=a1×b1是他们前半部分的积; c 0 = a 0 × b 0 c_0=a_0\times b_0 c0=a0×b0,是他们后半部分的积; c 1 = ( a 1 + a 0 ) × ( b 1 + b 0 ) − ( c 2 + c 0 ) c_1=(a_1+a_0)\times (b_1+b_0)-(c_2+c_0) c1=(a1+a0)×(b1+b0)−(c2+c0);
2)时间复杂度: Θ ( n l o g 2 3 ) \Theta(n^{log_23}) Θ(nlog23)
4.6 Strassen矩阵乘法
参考学习4-2.矩阵乘法的Strassen算法详解 - 程序员修练之路 - 博客园 (cnblogs.com)
1)概述:分治法既然可以减少两个数乘法中的位乘次数,同样也可以在矩阵乘法中发挥同样作用
2)算法:
计算两个
2
×
2
2 \times 2
2×2矩阵A和B的积C只需要进行7次乘法运算。下图所示:

对A和B两个n × \times ×n矩阵的计算也同理(如果n不是2的乘方,矩阵可以用为0的行或列来填充),可以把A,B,C分别划分为4个(n/2) × \times × (n/2)的子矩阵
3)时间复杂度: Θ ( n l o g 2 7 ) \Theta(n^{log_27}) Θ(nlog27)
4.7 最近对问题
1)概述:最近对问题要求在一个包含n个点的集合中,找出距离最近的两个点 d ( p i , p j ) = ( x i − x j ) 2 − ( y i − y j ) 2 d(p_i,p_j)=\sqrt{(x_i-x_j)^2-(y_i-y_j)^2} d(pi,pj)=(xi−xj)2−(yi−yj)2
2)算法:
当 2 ≤ n ≤ 3 2\leq n \leq 3 2≤n≤3时,可以通过蛮力算法求解。
当 n ≥ 3 n\geq 3 n≥3时,利用点集在x轴方向上的中位数m,在该处做一条垂线,将点集分成大小分别为n/2和n/2的两个子集 P 1 P_1 P1和 P r P_r Pr,使得n/2个点位于线的左边或线上,n/2个点位于线的右边或线上,通过递归求解子问题 P 1 P_1 P1和 P r P_r Pr来得到最近点对问题的解,其中 d 1 d_1 d1和 d r d_r dr分别表示在 P 1 P_1 P1和 P r P_r Pr中的最近对距离,并定义 d = m i n d 1 , d r d=min{d_1,d_r} d=mind1,dr。
但d不一定是所有点对的最小距离,因为距离最近的两个点可能分别位于分界线的两侧,因此在合并较小子问题的解时,需要检查是否存在这样的点。

算法 EfficientClosestPair(P,Q)
//使用分治算法来求解最近点对问题
//输入:数组P中存储了平面上的n>=2个点,并且按照这些点的x轴坐标升序排列
// 数组Q中存储了与P相同的点,只是它是按照这点的y轴坐标升序排列
//输出:最近点对之间的欧几里得距离
if n<=3
返回由蛮力算法求出的最小距离
else
将P的前[n/2]个点复制到P1
将Q的前[n/2]个点复制到Q1
将P中余下的[n/2]个点复制到Pr
将Q中余下的[n/2]个点复制到Qr
d1 <- EfficientClosestPair(P1,Q1)
dr <- EfficientClosestPair(Pr,Qr)
d <- min(d1,dr)
m <- p[(n/2)-1].x
将Q中所有|x-m|<d的点复制到数组S[0..num-1]
dminsq <- pow(d,2)
for i <- 0 to num-1 do
k <- i+1
while k<=num-1 and pow((S[k].y-S[i].y),2)< dminsq
dminsq <- min(pow((S[k].x-S[i].x),2)+pow((S[k].y-S[i].y),2),dminsq)
k <- k+1
return sqrt(dminsq)
3)时间复杂度: Ω ( n l o g n ) \Omega(nlogn) Ω(nlogn)
4.8 凸包问题
1)概述:在平面或者高维空间的一个给定点集合中寻找凸包。
2)(快包算法):
假设集合S由平面上n>1个点构成,假设这些点按照x轴坐标升序排列,如果x轴坐标相同,则按照y轴坐标升序排列。
直线 p 1 p n → \overrightarrow{p_1p_n} p1pn把点分为两个集合, S 1 S_1 S1是位于直线左侧或直线上的点构成的集合, S 2 S_2 S2是位于直线右侧或直线上的点构成的集合(如果 q 1 q 2 → \overrightarrow {q_1q_2} q1q2是方向从 q 1 q_1 q1到 q 2 q_2 q2的直线,如果 q 1 q 2 q 3 q_1 q_2 q_3 q1q2q3构成了一个逆时针回路,则说 q 3 q_3 q3位于 q 1 q 2 → \overrightarrow {q_1q_2} q1q2的左侧)
集合S由上包和下包构成;

构造上包
如果 S 1 S_1 S1为空,上包就是以 p 1 p_1 p1和 p n p_n pn为端点的线段。
如果 S 1 S_1 S1不为空,该算法找到 S 1 S_1 S1中的顶点 p m a x p_{max} pmax,他是距离直线 p 1 p n → \overrightarrow{p_1p_n} p1pn最远的点,如果距离直线最远的点有多个,就找能使角 ∠ p m a x p 1 p n \angle p_{max}p_1p_n ∠pmaxp1pn最大的点,然后找出 S 1 S_1 S1中所有在直线 p 1 p m a x → \overrightarrow{p_1p_{max}} p1pmax左边的点,这些点以及 p 1 p_1 p1和 p m a x p_{max} pmax构成了集合 S 1 , 1 S_{1,1} S1,1, S 1 S_1 S1中所有在直线 p 1 p m a x → \overrightarrow{p_1p_{max}} p1pmax左边的点,这些点以及和 p m a x p_{max} pmax构成 p n p_{n} pn了集合 S 1 , 2 S_{1,2} S1,2。因此该算法可以继续递归构造 p 1 ⋃ S 1 , 1 ⋃ p m a x p_1\bigcup S_{1,1}\bigcup p_{max} p1⋃S1,1⋃pmax和 p m a x ⋃ S 1 , 2 ⋃ p n p_{max}\bigcup S_{1,2}\bigcup p_{n} pmax⋃S1,2⋃pn的上包,然后把它们连接起来,以得到整个集合 p 1 ⋃ S 1 ⋃ p n p_1\bigcup S_{1}\bigcup p_{n} p1⋃S1⋃pn的上包
构造下包也同理
该算法的几何操作:
如果 q 1 ( x 1 , x 1 ) , q 2 ( x 2 , x 2 ) , q 3 ( x 3 , x 3 ) q_1(x_1,x_1),q_2(x_2,x_2),q_3(x_3,x_3) q1(x1,x1),q2(x2,x2),q3(x3,x3)是平面上的任意三个点,那么三角形 Δ q 1 q 2 q 3 \Delta q_1q_2q_3 Δq1q2q3的面积等于下列这个行列式绝对值的二分之一。
∣ x 1 y 1 1 x 1 y 1 1 x 1 y 1 1 ∣ = x 1 y 2 + x 3 y 1 + x 2 y 3 − x 3 y 2 − x 2 y 1 − x 1 y 3 \begin{vmatrix} x_1 & y_1 & 1\\ x_1& y_1& 1\\ x_1 & y_1 & 1\\ \end{vmatrix}=x_1y_2+x_3y_1+x_2y_3-x_3y_2-x_2y_1-x_1y_3 x1x1x1y1y1y1111 =x1y2+x3y1+x2y3−x3y2−x2y1−x1y3
当且仅当 q 3 = ( x 3 , y 3 ) q_3=(x_3,y_3) q3=(x3,y3)位于直线 q 1 q 2 → \overrightarrow {q_1q_2} q1q2的左侧时,该表达式的符号为正。
3)时间复杂度: Θ ( n 2 ) \Theta(n^{2}) Θ(n2)
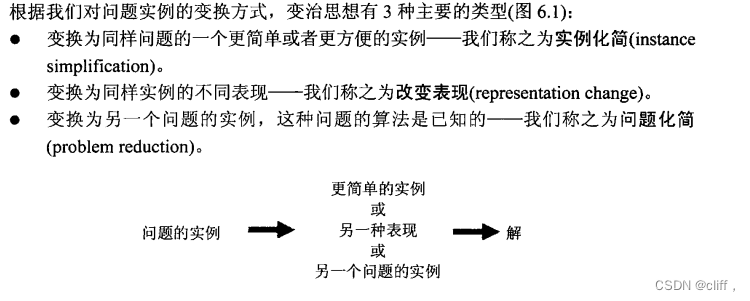
五、变治法
5.1 原理
5.1 预排序
5.1.1 思想
在计算机科学中,预排序是一种很古老的思想。实际上,对于排序算法的兴趣很大程度上是因为这样一个事实:如果列表是有序的,许多关于列表的问题更容易求解。
5.1.2 应用
1)检验数组元素的唯一性
先对数组排序,然后只检查他的连续元素
2)模式计算
在给定的数字列表中最经常出现的一个数值称为
模式如果若干个不同的值都是最经常出现的,他们中的任何一个值都可以看作
模式
先对输入排序,这样所有相等的数值都会邻接在一起。要求出模式,只需求出在该有序数组中邻接次数最多的等值元素即可。
3)查找问题
如果给定的数组预先排好序,可以应用折半查找。
5.2 高斯消去法
5.2.1 原理
1)原理:
把n个线性方程构成的n元联立方程组变换为一个等价的方程组(也就是说,它的解和原来的方程组相同),该方程组有着一个上三角的系数矩阵,这种矩阵的主对角先下方元素全部为0。 A x = b ⟹ A ′ x = b ′ Ax=b\Longrightarrow A'x=b' Ax=b⟹A′x=b′

通过初等变换将A推导出A‘
初等变换交换方程组中两个方程的位置
把一个方程替换为它的非零倍
把一个方程替换为它和另一个方程倍数之间的和或差。
2)流程:
a. 前向消元:将系数矩阵变换为上三角形式,消除系数矩阵的下三角元素。
b. 回代:从最后一行开始,通过反向替换求解方程组的解。
3)实例:

4)伪代码:

注意:如果A[i,i]=0,就不能以他为除数
5)优化:部分选主元法

时间复杂度: Θ ( n 3 ) \Theta(n^{3}) Θ(n3)
5.2.2 LU分解
参考学习解线性方程组——直接解法:LU分解、PLU分解(类似列主元消去法) | 北太天元_lu直接分解-优快云博客
1)原理:把一个矩阵分成一个下三角矩阵乘上一个上三角矩阵的形式
2)实例:
A = [ 2 − 1 1 4 1 − 1 1 1 1 ] A=\begin{bmatrix} 2 & -1 & 1\\ 4& 1& -1\\ 1 &1 & 1\\ \end{bmatrix} A= 241−1111−11 则有 L = [ 1 0 0 2 1 0 1 2 1 2 1 ] L=\begin{bmatrix} 1 & 0 & 0\\ 2& 1& 0 \\ \frac 12 &\frac 12 & 1\\ \end{bmatrix} L= 12210121001 , U = [ 2 − 1 1 0 3 − 3 0 0 2 ] U=\begin{bmatrix} 2 & -1 & 1\\ 0& 3& -3 \\ 0 &0 &2\\ \end{bmatrix} U= 200−1301−32
可以看出两个矩阵的乘积LU等于矩阵A,所以解方程组Ax=b等价于解方程组LUx=b。
设y=Ux,那么Ly=b。
[ 1 0 0 2 1 0 1 2 1 2 1 ] [ y 1 y 2 y 3 ] = [ 1 5 0 ] \begin{bmatrix} 1 & 0 & 0\\ 2& 1& 0 \\ \frac 12 &\frac 12 & 1\\ \end{bmatrix}\begin{bmatrix} y_1 \\ y_2 \\ y_3\\ \end{bmatrix}=\begin{bmatrix} 1 \\ 5\\ 0\\ \end{bmatrix} 12210121001 y1y2y3 = 150
则有 y 1 = 1 , y 2 = 5 − 2 y 1 = 3 , y 3 = 0 − 1 2 y 1 − 1 2 y 2 = − 2 y_1=1,y_2=5-2y_1=3,y_3=0-\frac 12y_1-\frac 12y_2=-2 y1=1,y2=5−2y1=3,y3=0−21y1−21y2=−2
解Ux=y意味着解
[ 2 − 1 1 0 3 − 3 0 0 2 ] [ x 1 x 2 x 3 ] = [ 1 3 − 2 ] \begin{bmatrix} 2 & -1 & 1\\ 0& 3& -3 \\ 0 &0 & 2\\ \end{bmatrix}\begin{bmatrix} x_1 \\ x_2 \\ x_3\\ \end{bmatrix}=\begin{bmatrix} 1 \\ 3\\ -2\\ \end{bmatrix} 200−1301−32 x1x2x3 = 13−2
而它的解是:
x 3 = ( − 2 ) / 2 = − 1 , x 2 = ( 3 − ( − 3 ) x 3 ) / 3 = 0 , x 1 = ( 1 − x 3 − ( − 1 ) x 2 ) / 2 = 1 x_3=(-2)/2=-1,x_2=(3-(-3)x_3)/3=0,x_1=(1-x_3-(-1)x_2)/2=1 x3=(−2)/2=−1,x2=(3−(−3)x3)/3=0,x1=(1−x3−(−1)x2)/2=1
5.2.3 计算矩阵的逆
1)逆:一个n阶的方阵的逆也是一个n阶方阵,我们把它记作 A − 1 A^{-1} A−1,使得 A A − 1 = I AA^{-1}=I AA−1=I。其中I是一个单位矩阵
2)求解:参考学习逆矩阵 (shuxuele.com)
5.2.4 计算矩阵的行列式
1)行列式:一个n阶方阵A的行列式记作det A或者|A|。
2)计算:
如果n=1, d e t A = a 11 det A=a_{11} detA=a11
如果n>1, d e t A = ∑ j = 1 n s j a 1 j d e t A j det A=\sum^n_{j=1} s_ja_{1j}det A_j detA=∑j=1nsja1jdetAj
3)实例:

4)克拉默法则:参考学习Cramer`s Rule 克莱姆法则(克拉默法则)-优快云博客
5.3 平衡查找树
5.3.1 原理
二叉查找树在平均情况下查找、插入和删除的时间效率都属于 Θ ( l o g n ) \Theta(logn) Θ(logn),但在最差情况下这些操作属于 Θ ( n ) \Theta(n) Θ(n),因此给出两种方案。
1)实例化简类型:
把一颗不平衡的二叉查找树转变为平衡的形式,这类树属于自平衡。特例有:AVL树,红黑树,分裂树。
2)改变表现类型:
允许一棵查找树的单个节点中不止包含一个元素。特例有:2-3树,2-3-4树以及B树。
5.3.2 AVL树
1)定义:
一颗AVL树是一颗二叉查找树,其中每个节点的平衡因子定义为该节点左子树和右子树的高度差,这个平衡因子要么为0,要么为+1或者-1(一颗空树的高度定义为-1,当然,平衡因子也可以被定义为左右子树的叶子数的差而不是高度差)
2)算法:如果插入的新节点是一颗AVL树失去了平衡,则用旋转对这棵树做一个变换。
4种旋转的简单形式:

5.3.3 2-3树
1)定义:
是一种可以包含两种类型节点的树:2节点和3节点。一个2节点只包含一个键K和两个子女:左子女作为一颗所有键都小于K的子树的根,而右子女作为一颗所有键都大于K的子树的根。一个3节点包含两个有序的键 K 1 K_1 K1和 K 2 K_2 K2( K 1 < K 2 K_1<K_2 K1<K2)并且有3个子女。最左边的子女作为键值小于 K 1 K_1 K1的子树的根,中间的子女作为键值位于 K 1 K_1 K1和 K 2 K_2 K2之间的子树的根,最右边的子女作为一颗键值大于 K 2 K_2 K2的子树的根。

2-3树要求树中的所有叶子必须位于同一层,即是说一颗2-3树总是高度平衡的。
2)算法:
参考学习2-3树 - 算法与复杂度 | 小白·菜的空间 (infinityglow.github.io)
查找:
(1)如果根是一个2节点,如果K等于根的键值,算法停止;如果K小于或大于根的键值,分别在左子树或右子树中继续查找。
(2)如果根是一个3节点,在不超过两次比较之后,就能知道是停止查找(K等于根的某个键值),还是应该在根的3课子树的哪一棵中继续查找。
插入:
排除空树,否则我们总是把一个新的键K插入一个叶子里。
通过查找K来确定一个合适的插入位置,如果找到的叶子是一个2节点,根据K是小于还是大于节点中原来的键,把K作为第一个键或者第二个键插入。如果叶子是一个3节点,则把叶子分裂成2个节点:3个键(2个原来的键和1个新键)中最小的放到第一个叶子中,最大的键放到第二个叶子中,同时中间的键提升到原来父母中(如果这个叶子恰好是树的根,就创建一个新的根来接纳这个中间键)注意,中间键提升到父母中可能会导致父母的溢出(如果她是一个3节点)并且因此会导致 沿着该叶子的祖先链条发生多个节点的分裂。
3)时间复杂度: Θ ( l o g n ) \Theta(logn) Θ(logn)
5.4 堆和堆排序
可参考学习07. 堆排序 | 算法通关手册(LeetCode) (itcharge.cn)
5.4.1 堆
这里主要讨论大根堆
1)堆:
堆可以定义为一棵二叉树,树的节点中包含键(每个节点一个键),并且满足下面的两个条件:
(1)树的形状——这棵树是基本完备的,简称为完全二叉树
(2)父母优势——每个节点的键都要大于或等于他子女的键
2)特性:
- 只存在一颗n个节点的完全二叉树,它的高度为 l o g 2 n log_2n log2n
- 堆的根总是包含了堆的最大元素
- 可以用数组来实现堆,方法使用从上到下、从左到右的方式来记录堆的元素。为了方便,可以在数组从1到n的位置上存放堆元素,留下H[0]。那么则有父母节点的键将位于前n/2个位置中,而叶子节点的键将占据后n/2个位置。
因此也可以把堆定义为一个数组H[1…n],其中数组前半部分中,每个位置i上的元素总是大于等于位置2i和2i+1中的元素,即 对于 i = 1 , ⋯ ⌊ n / 2 ⌋ , H [ i ] ≥ m a x H [ 2 i ] , H [ 2 i + 1 ] 对于i=1,\cdots \lfloor n/2 \rfloor ,H[i]\geq max{H[2i],H[2i+1]} 对于i=1,⋯⌊n/2⌋,H[i]≥maxH[2i],H[2i+1]
3)构造:
自底向上堆构造
(1)按照给定的顺序来放置键
(2)从最后的父母节点开始,到根为止,检查节点的键是否满足父母优势要求,如果不满足,把节点的键K和它子女的最大键进行交换
(3)在新位置上检查K是否满足父母优势要求,直到对K的父母优势要求得到满足

自顶向下堆构造

时间效率为O(logn)
4)删除:
(1)根的键和堆的最后一个键K做交换
(2)堆的规模减1
(3)严格按照自底向上堆构造算法,把K沿着树向下帅选,来对这颗较小的树进行堆化

5.4.2 堆排序
1)流程
(1)构造堆,即为一个给定的数组构造一个堆
(2)删除最大键,即对剩下的堆应用n-1次根删除操作
2)时间复杂度: O ( n l o g n ) O(nlogn) O(nlogn)
5.5 霍纳法则
1)介绍:一个古老的计算多项式的算法,但却十分优雅和高效。
2)算法:
已知x,求多项式 p ( x ) = a n x n + a n − 1 x n − 1 + ⋯ + a 1 x + a 0 p(x)=a_nx^n+a_{n-1}x^{n-1}+\cdots +a_1x+a_0 p(x)=anxn+an−1xn−1+⋯+a1x+a0 (6.1)
由式(6.1)推导
p ( x ) = ( ⋯ ( a n x + a n − 1 ) x + ⋯ ) x + a 0 p(x)=(\cdots (a_nx+a_{n-1})x+ \cdots )x+a_0 p(x)=(⋯(anx+an−1)x+⋯)x+a0 (6.2)
a. 实例
对于多项式 p ( x ) = 2 x 4 − x 3 − 3 x 2 + x − 5 p(x)=2x^4-x^3-3x^2+x-5 p(x)=2x4−x3−3x2+x−5 ,则有
p ( x ) = 2 x 4 − x 3 − 3 x 2 + x − 5 = x ( 2 x 3 − x 2 + 3 x + 1 ) − 5 = x ( x ( 2 x 2 − x + 3 ) + 1 ) − 5 = x ( x ( x ( 2 x − 1 ) + 3 ) + 1 ) − 5 p(x)=2x^4-x^3-3x^2+x-5=x(2x^3-x^2+3x+1)-5=x(x(2x^2-x+3)+1)-5=x(x(x(2x-1)+3)+1)-5 p(x)=2x4−x3−3x2+x−5=x(2x3−x2+3x+1)−5=x(x(2x2−x+3)+1)−5=x(x(x(2x−1)+3)+1)−5 (6.3)
当x=3时
| 系数 | 2 | -1 | 3 | 1 | -5 |
|---|---|---|---|---|---|
| x=3 | 2 | 3 × 2 + ( − 1 ) = 5 3 \times 2+(-1)=5 3×2+(−1)=5 | 3 × 5 + 3 = 18 3 \times 5+3=18 3×5+3=18 | 3 × 18 + 1 = 55 3 \times 18+1=55 3×18+1=55 | 3 × 55 + ( − 5 ) = 160 3 \times 55+(-5)=160 3×55+(−5)=160 |
所以p(3)=160
b. 伪代码
算法 Horner(P[0..n],x)
//用霍纳法则求一个多项式在一个给定点的值
//输入:一个n次多项式的系数数组P[0..n](从低到高存储),以及一个数字x
//输出:多项式在x点的值
p <- P[n]
for i <- n-1 downto 0 do
p <- x*p+P[i]
return p
3)时间复杂度: Θ ( n ) \Theta(n) Θ(n)
5.6 二进制幂
1)介绍:当用霍纳法则计算 a n a^n an时,退化成了一种对a自乘的蛮力算法。
2)算法
设 n = b l ⋯ b i ⋯ b 0 n=b_l \cdots b_i \cdots b_0 n=bl⋯bi⋯b0是在二进制系统中,表示一个正整数n的位串。这意味着可以通过下面的式子来计算n的值
p ( x ) = b l x l + ⋯ + b i x i + ⋯ + b 0 p(x)=b_lx^l+\cdots +b_ix^i+\cdots +b_0 p(x)=blxl+⋯+bixi+⋯+b0,其中x=2。
实例:如果n=13,他的二进制表示是1101,就有 13 = 1 × 2 3 + 1 × 2 2 + 0 × 2 1 + 1 × 2 0 13=1 \times 2^3+1 \times 2^2+0 \times 2^1+1\times 2^0 13=1×23+1×22+0×21+1×20
从左至右二进制幂
有 a n = a p ( 2 ) = a b l x l + ⋯ + b i x i + ⋯ + b 0 a^n=a^{p(2)}=a^{b_lx^l+\cdots +b_ix^i+\cdots +b_0} an=ap(2)=ablxl+⋯+bixi+⋯+b0
用霍纳法则计算p(2),就有:
a 2 p + b i = a 2 p × a b i = ( a p ) 2 × a b i = { ( a p ) 2 如果 b i = 0 ( a p ) 2 × a 如果 b i = 1 a^{2p+b_i}=a^{2p}\times a^{b_i}=(a^p)^2\times a^{b_i}=\begin{cases} (a^p)^2 &如果b_i=0 \\(a^p)^2 \times a &如果b_i=1\end{cases} a2p+bi=a2p×abi=(ap)2×abi={(ap)2(ap)2×a如果bi=0如果bi=1
实例:

从右至左二进制幂
有 a n = a p ( 2 ) = a b l x l + ⋯ + b i x i + ⋯ + b 0 = a b l 2 l × ⋯ × a b i 2 i × ⋯ × a b 0 a^n=a^{p(2)}=a^{b_lx^l+\cdots +b_ix^i+\cdots +b_0}=a^{b_l2^l}\times \cdots \times a^{b_i2^i}\times \cdots \times a^{b_0} an=ap(2)=ablxl+⋯+bixi+⋯+b0=abl2l×⋯×abi2i×⋯×ab0
各项有: a b i 2 i = { a 2 i 如果 b i = 1 1 如果 b i = 0 a^{b_i2^i}=\begin{cases} a^{2^i} &如果b_i=1 \\1 &如果b_i=0\end{cases} abi2i={a2i1如果bi=1如果bi=0
实例:

5.7 问题化简
5.7.1 原理

5.7.2 求最小公倍数
1)介绍:两个正整数m和n的最小公倍数,记作lcm(m,n),把它定义为能够被m和n整除的最小整数。
2)算法: l c m ( m , n ) = m × n g c d ( m , n ) lcm(m,n)=\frac {m \times n}{gcd(m,n)} lcm(m,n)=gcd(m,n)m×n,其中gcd(m,n)可以用欧几里得算法高效地计算出来欧几里得算法_百度百科 (baidu.com)
5.7.3 线性规划
六、时空权衡
6.1 原理
对问题的部分或全部输入做预处理,然后将获得的额外信息进行存储,以加速后面问题的求解,将这个方法称之为输入增强。
还有一种和空间换时间权衡思想相关的算法设计技术:动态规划。这个策略的基础是把给定问题中重复子问题的解记录在表中,然后求得所讨论问题的解。
注意:不是在所有的情况下,时间和空间这两种资源都必须相互竞争,实际上,它们可以联合起来,使得一个算法无论在运行时间上还是在消耗的空间上都达到最小化。
6.2 计数排序
可参考学习08. 计数排序 | 算法通关手册(LeetCode) (itcharge.cn)
6.2.1 比较计数排序
1)思想:针对待排序列表中的每一个元素,算出列表中小于该元素的元素个数,并把结果记录在一张表中。这个个数指出了该元素在有序列表中的位置。
2)算法:
算法 ComparisonCountingSort(A[0..n-1])
//用比较计数法对数组排序
//输入:可排序数组A[0..n-1]
//输出:将A中元素按照升序排列的数组S[0..n-1]
for i <- 0 to n-1 do Count[i] <- 0
for i <- 0 to n-2 do
for j <- i+1 to n-1 do
if A[i]<A[j]
Count[j] <- Count[j]+1
else Count[i] <- Count[i]+1
for i <- 0 to n-1 do S[Count[i]] <- A[i]
return S
6.2.2 计数排序
1)思想:通过统计数组中每个元素在数组中出现的次数,根据这些统计信息将数组元素有序的放置到正确位置,从而达到排序的目的。
2)时间复杂度: O ( n + k ) O(n+k) O(n+k),其中k代表待排序数据的值域大小

6.3 字符串匹配的输入增强技术
6.3.1 Horspool算法
1)原理
从模式的最后一个字符开始从右向左,比较模式和文本中的相应字符对。如果模式中所有的字符都匹配成功,就找到了一个匹配的子串,就可以结束查找。如果遇到了一对不匹配字符,需要把模式右移。
假设文本中,对齐模式最后一个字符的元素是字符c,Horspool算法根据c的不同情况来确定移动的距离,无论c是否和模式的最后一个字符相匹配。
😄会有以下4种情况:
(1)如果模式中不存在c,模式安全移动的幅度就是他的全部长度。
(2)如果模式存在c,但它不是模式的最后一个字符,移动时应该把模式中最右边的c和文本中的c对齐
(3)如果c正好是模式中的最后一个字符,但是在模式的其他m-1个字符中不包含c,移动的情况就是类似(1)
(4)如果c正好是模式中的最后一个字符,且在模式的其他m-1个字符中也包含c,移动的情况就类似于(2)
🍰移动距离 t ( c ) = { 模式的长度 m 如果 c 不包含在模式的 m − 1 个字符中 模式前 m − 1 个字符中最右边的 c 到模式最后一个字符的距离 其他情况下 t(c)=\begin{cases} 模式的长度m &如果c不包含在模式的m-1个字符中 \\模式前m-1个字符中最右边的c到模式最后一个字符的距离 &其他情况下\end{cases} t(c)={模式的长度m模式前m−1个字符中最右边的c到模式最后一个字符的距离如果c不包含在模式的m−1个字符中其他情况下(7.1)
2)实例

3)算法
算法 ShiftTable(P[0..m-1])
//用Horspool算法和Boyer-Moore算法填充移动表
//输入:模式P[0..m-1]以及一个可能出现字符的字母表
//输出:以字母表中字符为索引的数组Table[0..size-1]
//表中填充的移动距离是通过移动距离公式计算
for i <- 0 to size-1 do Table[i] <- m
for j <- 0 to m-2 do Table[P[j]] <- m-1-j //该字符到模式右端的距离
return Table
算法 HorspoolMatching(P[0..m-1],T[0..n-1])
//实现Horspool字符串匹配算法
//输入:模式P[0..m-1]和文本T[0..n-1]
//输出:第一个匹配子串最左端字符的下标,如果没有匹配子串,则返回-1
ShiftTable(P[0..m-1]) //生成移动表
i <- m-1 //模式最右端
while i<=n-1 do
k <- 0 //匹配字符串个数
while k<=m-1 and P[m-1-k]=T[i-k] do
k <- k+1
if k=m
return i-m+1
else i <- i+Table[T[i]]
return -1
🍎最差效率:O(nm)
☔️对于随机文本: Θ ( n ) \Theta(n) Θ(n)
6.3.2 Boyer-Moore算法
1)原理
如果模式最右边的字符和文本中的相应字符c所做的初次比较失败了,该算法和Horspool算法所做的操作完全一致。
然而在遇到一个不匹配字符之前,如果已经有k(0<k<m)个字符成功匹配,这两个算法的操作是不同的。
在这种情况下,Boyer-Moore算法会参考两个数值来确定移动的距离:第一个数值是由文本中的一个字符c确定的,它导致了模式中的相应字符和它不匹配,因此称为坏符号移动。可以用 t 1 ( c ) − k t_1(c)-k t1(c)−k来计算移动的距离,其中 t 1 ( c ) t_1(c) t1(c)是Horspool算法用到的预先算好的表中的单元格,而k是成功匹配的字符串个数。
😄坏符号移动 d 1 = m a x { t 1 c − k , 1 } d_1=max\lbrace t_1c-k,1\rbrace d1=max{t1c−k,1},如果 d 1 d_1 d1>0,为 t 1 ( c ) − k t_1(c)-k t1(c)−k,否则则为1。
第二种移动是由模式中最后k>0个成功匹配的字符确定的。把模式的结尾部分叫做模式的长度为k的后辍,记作suff(k),把这种类型称为好后辍移动。好后辍移动表是根据模式后辍的长度1,…,m-1来分别填充表格的。 d 2 d_2 d2是从右数第二个suff(k)到最右边的suff(k)之间的距离。
2)流程:

3)时间复杂度:最坏情况下是线性的。
4)实例


6.4 散列法
6.4.1 思想
1)思想
把键分布在一个称为散列表的一维数组H[0…m-1]中,通过对每个键计算某些被称为散列函数的预定义函数h的值,来完成这种分布。该函数为每个键指定一个称为散列地址的位于0到m-1之间的整数。
2)特点
散列函数需要满足下列要求
(1)散列表的长度相对于键的个数不应过大,但也不应过小
(2)散列函数需要把键在散列表的单元格中尽可能均匀分布
(3)散列函数必须容易计算
如果散列表长度m小于键的数量n,会遇到碰撞
6.4.2 开散列(分离链)
1)思想:键被存储在附着于散列表单元格上的链表中。
2)实例:假设使用用于字符串的简单函数来作为散列函数,即将词中的字母在字母表中的位置全部加起来,在除以13以后,计算出这个和的余数,这就是散列表的长度。

查找:设要查找键KID,先算出h(KID)=11,发现附着在单元格11上的链表不为空:先把KID与ARE比较,然后与SOON比较之后,才以失败告终。
如果散列函数大致均匀将n个键分布在散列表的m个单元格中,每个链表长度大约为n/m个键,其比率a=n/m称为散列表的负载因子。假设在成功查找和不成功查找中平均需检查的指针个数分别为S和U,他们的值分别为: S = 1 + a 2 , U = a S=1+\frac {a}{2},U=a S=1+2a,U=a
6.4.3 闭散列(开式寻址)
1)思想:所有的键都存储在散列表本身中,而没有使用链表。可采用不同的策略来解决碰撞:线性探查,它检查碰撞发生处后面的单元格,如果该单元格为空,新的键就放置在那里;如果该单元格被占用,则检查该单元格的后继是否可用,以此类推,如果到达了散列表的尾部,就折回到表的开始处。
2)实例:

查找:设要查找键KID,先算出h(KID)=11,如果单元格为空,则查找失败,如果单元格不为空,则将其与单元格的内容进行比较,如果相等,就找到了一个匹配的键;如果不相等,就拿键KID与下一个单元格中的键比较,直到遇到一个匹配的键或一个空的单元格。
在成功查找和不成功查找的情况下,对于负载因子为a的散列表,该算法要访问的次数分别为: S ≈ 1 2 ( 1 + 1 1 − a ) S\approx \frac {1}{2}(1+\frac {1}{1-a}) S≈21(1+1−a1)和 U ≈ 1 2 [ 1 + 1 ( 1 − a ) 2 ] U\approx \frac {1}{2}[1+\frac{1}{(1-a)^2}] U≈21[1+(1−a)21]
线性探查中的聚类是一系列被连续占据的单元格(包括可能的环绕),聚类对于散列是一个坏消息,因为他们降低了字典操作的效率。
6.5 B树
1)思想:所有的数据记录(或者记录的键)都按照键的升序存储在叶子中,他们的父母节点作为索引。每个父母节点包含n-1个有序的键 K 1 < ⋯ < K n − 1 K_1<\cdots <K_{n-1} K1<⋯<Kn−1,子树 T 0 T_0 T0中的所有键都小于 K 1 K_1 K1,子树 T 1 T_1 T1中的所有键都大于等于 K 1 K_1 K1且小于 K 2 K_2 K2

2)特性
对于一颗次数为 m ≥ 2 m\geq 2 m≥2的B树要满足以下特性:
- 它的根要么是一个叶子,要么具有2到m个子女
- 除了根和叶子以外的每个节点,具有m/2到m个子女
- 这棵树是完美平衡的,也就是说他的所有叶子都在同一层上
2)算法:
查找:和二叉查找树的查找非常相似,时间效率为O(logn)
插入:和2-3树插入算法非常相似。
七、动态规划
7.1 原理
动态规划是一种算法设计技术,有着相当有趣的历史,是一种是多阶段决策过程最优的通用方法。
7.1 背包问题
1)概述:给定n个重量为 w 1 , w 2 , … … w n w_1,w_2,……w_n w1,w2,……wn,价值为 v 1 , v 2 , … … , v n v_1,v_2,……,v_n v1,v2,……,vn的物品和一个承重为W的背包,求这些物品中一个最有价值的子集,并且要能够装到背包中。
2)算法:
设F(i,j)为该实例的最优解的物品总价值,背包的承重量为j,物品的重量分别为 w 1 , ⋯ w i w_1,\cdots w_i w1,⋯wi,价值分别为
v 1 , ⋯ v i v_1,\cdots v_i v1,⋯vi;则有
(1)在不包括第i个物品的子集中,最优子集的价值是F(i-1,j)
(2)在包括第i个物品的子集中,最优子集是由该物品和前i-1个物品中能够放进承重量 j − w i j-w_i j−wi的背包的最优子集组成,这种最优子集的总价值为 v i + F ( i − 1 , j − w i ) v_i+F(i-1,j-w_i) vi+F(i−1,j−wi)。
😄 F ( i , j ) = { m a x { F ( i − 1 , j ) , v i + F ( i − 1 , j − w i ) } , j − w i ≥ 0 F ( i − 1 , j ) , j − w i < 0 F(i,j)=\begin{cases} max\lbrace F(i-1,j),v_i+F(i-1,j-w_i)\rbrace, & \text j-w_i \geq 0 \\[4ex] F(i-1,j), & \text j-w_i<0 \end{cases} F(i,j)=⎩ ⎨ ⎧max{F(i−1,j),vi+F(i−1,j−wi)},F(i−1,j),j−wi≥0j−wi<0
当 j ≥ 0 时, F ( 0 , j ) = 0 ; 当 i ≥ 0 时, F ( i , 0 ) = 0 j \geq 0时,F(0,j)=0;当i \geq 0时,F(i,0)=0 j≥0时,F(0,j)=0;当i≥0时,F(i,0)=0
3)实例:

7.2 最优二叉查找树
1)思想:设 a 1 , ⋯ , a n a_1,\cdots ,a_n a1,⋯,an是从小到大排列的互不相等的键, p 1 , ⋯ , p n p_1,\cdots ,p_n p1,⋯,pn是他们的查找概率。 T i j T^j_i Tij是由键 a i , ⋯ , a j a_i,\cdots ,a_j ai,⋯,aj构成的二叉树,C(i,j)是这棵树中成功查找的最小平均查找次数,其中i,j是一些整数的下标。从键 a i , ⋯ , a j a_i,\cdots ,a_j ai,⋯,aj中选择一个根 a k a_k ak,使得他的左子树最优排列,右子树最优排列。

当 1 ≤ i ≤ j ≤ n 时 , C ( i , j ) = m i n i ≤ k ≤ j m i n { C ( i , k − 1 ) + C ( k + 1 , j ) } + ∑ s = i j p s 1 \leq i \leq j\leq n时,C(i,j)=min_{i\leq k\leq j} min\lbrace C(i,k-1)+C(k+1,j)\rbrace +\sum ^j_{s=i}p_s 1≤i≤j≤n时,C(i,j)=mini≤k≤jmin{C(i,k−1)+C(k+1,j)}+∑s=ijps
当 1 ≤ i ≤ n 时 , C ( i , i ) = p i 1 \leq i \leq n时,C(i,i)=p_i 1≤i≤n时,C(i,i)=pi
当
1
≤
i
≤
n
+
1
时
,
C
(
i
,
i
−
1
)
=
0
1 \leq i \leq {n+1}时,C(i,i-1)=0
1≤i≤n+1时,C(i,i−1)=0

2)实例:


2)算法:
算法 OptimalBST(P[1..n])
//用动态规划算法求最优二叉查找树
//输入:一个n个键的有序列表的查找概率数组P[1..n]
//输出:在最优BST中成功查找的平均比较次数,以及最优BST中子树的根表R
for i <- 1 to n do
C[i,i-1] <- 0
C[i,i] <- P[i]
R[i,i] <- i
C[n+1,n] <- 0
for d <- to n-1 do //对角数计数
for i <- 1 to n-d do
j <- i+d
minval <- 无穷
for k <- i to j do
if C[i,k-1]+C[k+1,j]<minval
minval <- C[i,k-1]+C[k+1,j];kmin <- k
R[i,j] <- kmin
sum <- P[i];for s <- i+1 to j do sum <- sum+P[s]
C[i,j] <- minval+sum
return C[1,n],R
3)时间复杂度:立方级
7.3 Warshell算法
1)思想:
😢定义:一个n顶点有向图的传递闭包可以定义为一个n阶布尔矩阵 T = { t i j } T=\lbrace t_{ij} \rbrace T={tij},如果从第i个顶点到第j个顶点之间存在一条有效的有向路径(即长度大于0的有向路径),矩阵第i行第j列的元素为1,否则为0。

假设有向图的顶点数目为n,因此顶点矩阵的行和列可以用1到n表示,Warshell算法通过一系列n阶布尔矩阵来构造传递闭包。 R ( 0 ) , ⋯ , R ( k − 1 ) , R ( k ) , R ( n ) R^{(0)},\cdots ,R^{(k-1)},R^{(k)},R^{(n)} R(0),⋯,R(k−1),R(k),R(n) (8.9)
Warshell算法核心是任何 R ( k ) R^{(k)} R(k)中的所有元素都可以通过它在序列(8.9)中的直接前趋 R ( k − 1 ) R^{(k-1)} R(k−1)计算得到。把矩阵 R ( k ) R^{(k)} R(k)中第i行第j列的元素 r i j ( k ) r_{ij}^{(k)} rij(k)置为1。意味着存在一条从第i个顶点 v i v_i vi到第j个顶点 v j v_j vj的路径,路径中每一个中间顶点的编号都不大于k。
r i j ( k ) = r i j ( k − 1 ) 或 r i k ( k − 1 ) 和 r k j ( k − 1 ) r_{ij}^{(k)}=r_{ij}^{(k-1)}或r_{ik}^{(k-1)}和r_{kj}^{(k-1)} rij(k)=rij(k−1)或rik(k−1)和rkj(k−1)
2)实例:
3)算法:


时间复杂度: Θ ( n 3 ) \Theta (n^3) Θ(n3)
7.4 Floyd算法
1)思想:给定一个加权连通图(无向的或有向的),安全最短路径问题要求找到从每个顶点到其他所有顶点之间的距离(最短路径长度)。把最短路径的长度记录在距离矩阵的n阶矩阵D中:矩阵第i行第j列的元素 d i j d_{ij} dij指出了从第i个顶点到第
j个顶点之间最短路径的长度 ( 1 ≤ i , j ≤ n ) (1 \leq i,j\leq n) (1≤i,j≤n)。可以采用一种类似于Warshell算法来生成距离矩阵。

Floyd算法通过一系列n阶矩阵来计算一个n顶点加权图的距离矩阵: D ( 0 ) , ⋯ , D ( k − 1 ) , D ( k ) , ⋯ , D ( 0 ) , D^{(0)},\cdots,D^{(k-1)},D^{(k)},\cdots ,D^{(0)}, D(0),⋯,D(k−1),D(k),⋯,D(0),
当 k ≥ 1 , d i j ( 0 ) = w i j 时, d i j ( k ) = m i n { d i j ( k − 1 ) , d i k ( k − 1 ) + d k j ( k − 1 ) } k \geq 1,d_{ij}^{(0)}=w_{ij}时,d_{ij}^{(k)}=min \lbrace d_{ij}^{(k-1)},d_{ik}^{(k-1)}+d_{kj}^{(k-1)}\rbrace k≥1,dij(0)=wij时,dij(k)=min{dij(k−1),dik(k−1)+dkj(k−1)}
2)实例:
3)算法:
算法 Floyd(W[1..n,1..n])
//实现计算完全最短路径的Floyd算法
//输入:不包含长度为负的回路的图的权重矩阵W
//输出:包含最短路径长度的距离矩阵
D <- W //如果可以改写W,这一步可以省略
for k <- 1 to n do
for i <- 1 to n do
for j <- 1 to n do
D[i,j] <- min{D[i,j],D[i,k]+D[k,j]}
return D
时间复杂度: Θ ( n 3 ) \Theta (n^3) Θ(n3)
八、贪婪技术
8.1 原理
通过一系列步骤来构造问题的解,每一步对目前构造的部分解做一个拓展,直到获得问题的完整解为止。这个技术的核心是,所做的每一步选择都必须满足以下条件:
(1)可行性:即它必须满足问题的约束
(2)局部最优:是当前步骤所有可行选择中最佳的局部选择
(3)不可取消:选择一旦做出,在算法的后面步骤中就无法改变了。
8.2最小生成树问题
8.2.1 Prim算法
参考学习最小生成树 - OI Wiki (oi-wiki.org)
1)思想:
定义:连通图的一颗生成树是包含图的所有顶点的连通无环子图(也就是一棵树)。加权连通图的一棵最小生成树是图的一棵权重最小的生成树,其中,树的权重定义为所有边的权重总和。最小生成树问题就是求一个给定的加权连通图的最小生成树问题。
Prim算法通过一系列不断扩张的子树来构造一棵最小生成树。从图的顶点集合V中任意选择一个单顶点,作为序列中的初始子树。每一次迭代以一种贪婪的方式来扩张当前的生成树,即把不在树中的最近顶点添加到树中。当图的所有顶点都包含在所构造的树中以后,该算法就停止了。
2)算法:
3)时间复杂度: O ( ∣ E ∣ l o g ∣ V ∣ ) O(|E|log|V|) O(∣E∣log∣V∣)
8.2.2 Kruskal算法
😄参考学习最小生成树 - OI Wiki (oi-wiki.org)
1)思想:将一个加权连通图G=<V,E>的最小生成树看作一个具有|V|-1条边的无环子图,并且边的权重和是最小的。
该算法开始时,会按照权重的非递减顺序对图的边进行排序,然后从一个空子图开始,扫描这个有序列表,并试图把列表中的下一条边加到当前的子图中,如果产生了回路,则把这条边跳过。
2)算法:
3)时间复杂度:假如排序算法是高效的: O ( ∣ E ∣ l o g ∣ E ∣ ) O(|E|log|E|) O(∣E∣log∣E∣)
8.3 Dijkstra算法
参考学习[最短路径问题]Dijkstra算法(含还原具体路径) - MarisaMagic - 博客园 (cnblogs.com)
1)思想:
单起点最短路径问题:对于加权连通图的一个称为起点的给定顶点,求出它到所有其他顶点之间的一系列最短路径。
Dijkstra算法按照从给定起点到图中顶点的距离,顺序求出最短的路径。首先求出从起点到最接近起点的顶点之间的最短路径,然后求出第二近的,以此类推。
2)实例:
3)算法:
8.4 哈夫曼树及编码
参考学习霍夫曼树 - OI Wiki (oi-wiki.org)
1)思想:
假设必须为文本中的每一个字符赋予一串称为代码字的比特位,对n个不同字符组成的文本进行编码,并且这些字符都来自于某张字母表。
给定N个权值作为N个叶子结点,构造一棵二叉树,若该树的带权路径长度达到最小,称这样的二叉树为最优二叉树,也称为哈夫曼树。哈夫曼树是带权路径长度最短的树,权值较大的结点离根较近。
哈夫曼树最重要的应用是哈夫曼编码
2)算法:
🦀哈夫曼算法:
(1)初始化n个单节点的树,并为他们标上字母表中的字符。把每个字符的概率记在树的根中,用来指出树的权重(树的权重等于树中所有叶子的概率之和)
(2)重复以下步骤,直到只剩一颗单独的树。找到两棵权重最小的树(对于权重相同的树,可任选其一)。把它们作为新树中的左右子树,并把其权重之和作为新的权重记录在新树的根中。
🦀哈夫曼编码:
一种最优的自由前缀变长编码方案,基于字符在给定文本中的出现频率,把位串赋给字符。这是通过贪婪地构造一棵二叉树来完成的,二叉树的叶子代表字母表中的字符,而树中的边则标记为0或1。
3)实例:



















 3235
3235

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









