






摘要:
本文围绕STM32中的PID控制展开。介绍了PID的比例、积分、微分三部分作用,以及积分限幅和输出值限幅。阐述了位置式、增量式和串级PID的原理与代码。还讲述了Kp、Ki、Kd调参要点,并介绍了野火多功能调试助手的调参方法及通信代码。
一、知识点
1. PID是什么?
在PID控制中,P、I、D分别代表比例(Proportional)、积分(Integral)、微分(Derivative)三个部分。它们是PID控制器中的三个调节参数,用于调节控制系统的输出,以使系统的反馈与期望值更加接近。
P(比例)部分:根据当前偏差的大小来调节输出。当偏差较大时,P部分的作用就越强烈,输出的变化也就越大。P控制项对应于系统的当前状态,它的作用是减小系统对设定值的超调和稳定时间。
I(积分)部分:对偏差的积累进行调节。它的作用是消除稳态误差,使系统更快地达到稳定状态。I控制项对应于系统过去的行为,它的作用是减小系统对外部干扰的影响。
D(微分)部分:根据偏差变化的速度来调节输出。它的作用是预测系统未来的行为,以减小系统的振荡和过冲现象,提高系统的响应速度和稳定性。
综合来说,PID控制器通过比例、积分、微分三个部分的组合来调节系统的输出,以实现对系统的精确控制。
2. 积分限幅–用于限制无限累加的积分项
因为积分系数的Ki是与累计误差相乘的,所以效果是累加,随着时间的推移,积分项的值会升到很高,积分本来的作用是用来减小静态误差,但积分项过大会引起过大的震荡,所以我们可以加一个判断函数if,当积分项的值达到一定值后,就让积分项保持这个值,避免引起更大的震荡。积分限幅的最大值,要根据经验实际多调试调试。
//为了防止积分项过度累积,引入积分项的限幅是一种常见的做法。
//限制积分项的幅值可以防止积分项过度增加,从而限制了系统的累积误差。这样可以避免系统过度响应或者不稳定。
float abs_limit(float value, float ABS_MAX) //积分限幅,设置最大值。
{
if(value > ABS_MAX)
value = ABS_MAX;
if(value< -ABS_MAX)
value = -ABS_MAX;
return value;
}3. 输出值限幅–用于任何pid的输出
这个需要查看产生pwm的定时器的计数周期初值设定。如Motor_PWM_Init(7200-1,0);,则outputmax就不能大于7200。
//限制输出最大值,防止出现突发意外。输出outputmax的最大值
if(pid->output > pid->outputmax ) pid->output = pid->outputmax;
if(pid->output < - pid->outputmax ) pid->output = -pid->outputmax4. PID工程
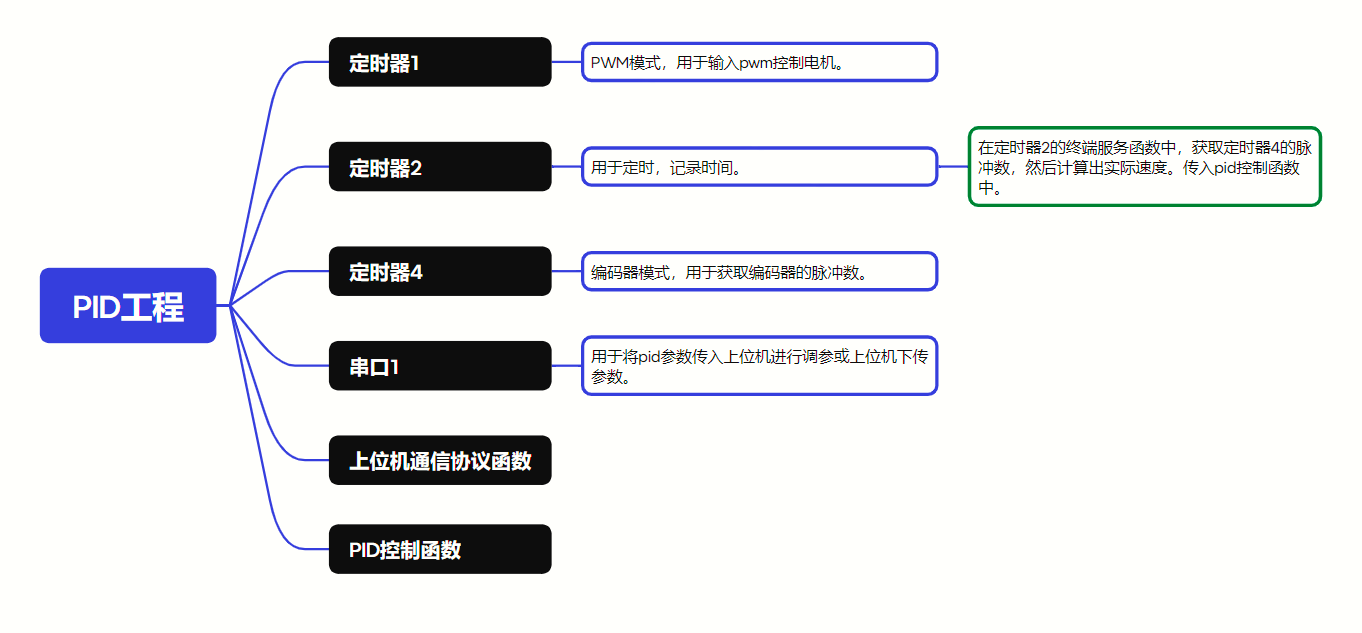
(1)定时器1(产生pwm)tim1.c
#include "tim1.h"
void Motor_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIO外设时钟使能
//设置该引脚为复用输出功能,输出TIM1 CH1 CH4的PWM脉冲波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; //TIM_CH1 //TIM_CH4
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC4Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
TIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能
TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH4预装载使能
TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIMx在ARR上的预装载寄存器
TIM_Cmd(TIM1, ENABLE); //使能TIM1
} tim1.h
#ifndef __TIM1_H
#define __TIM1_H
#include <sys.h>
#define PWMB TIM1->CCR4 //PA11
void Motor_PWM_Init(u16 arr,u16 psc);
#endif(2)定时器2(定时)
#include "tim2.h"
#include "led.h"
#include "usart.h"
#include "sys.h"
void MotorControl(void)
{
Encoder_Posion = Read_Position();//1.获取定时器3的编码器数值
Speed=PosionPID_realize(&PosionPID,Encoder_Posion);//2.输入位置式PID计算
Set_Pwm(Speed); //3.PWM输出给电机
//指令/通道/发送数据/个数
set_computer_value(SEND_FACT_CMD, CURVES_CH2, &Encoder_Posion, 1); /*4.给上位机通道2发送实际的电机速度值,详情看下面内容*/
}
void Time2_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = arr; //电机PWM频率要和定时器采样频率一致
TIM_TimeBaseInitStructure.TIM_Prescaler = psc;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM2, ENABLE);
}
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
MotorControl();
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}(3)定时器4(编码器)
#include "stm32f10x.h" // Device header
void Encoder_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseInitStructure);
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;
TIM_ICInitStructure.TIM_ICFilter = 0xF;
TIM_ICInit(TIM4, &TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;
TIM_ICInitStructure.TIM_ICFilter = 0xF;
TIM_ICInit(TIM4, &TIM_ICInitStructure);
/*TI1和TI2都计数,上升沿计数*/
TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
TIM_Cmd(TIM4, ENABLE);
}
int16_t Read_Position(void)
{
int16_t Temp;
Temp = TIM_GetCounter(TIM4); //获取定时器计数值
TIM_SetCounter(TIM4, 0);
return Temp;
}(4)串口1 usart.c
#include "sys.h"
#include "usart.h"
#if SYSTEM_SUPPORT_OS
#include "includes.h" //ucos 使用
#endif
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记
void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
}
void USART1_IRQHandler(void)//串口中断服务函数
{
u8 Res;
if(USART_GetITStatus(USART1, USART_IT_RXNE)== SET ) //产生了接收中断
{
USART_ClearITPendingBit(USART1,USART_IT_RXNE); //清除接收中断标志位
Res=USART_ReceiveData(USART1);
protocol_data_recv(&Res,1);
}
}
void usart1_send(u8*data, u8 len) //发送数据函数
{
u8 i;
for(i=0;i<len;i++)
{
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
USART_SendData(USART1,data[i]);
}
}usart.h
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "sys.h"
#define USART_REC_LEN 200 //定义最大接收字节数 200
#define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收
extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u16 USART_RX_STA; //接收状态标记
void uart_init(u32 bound);
void usart1_send(u8*data, u8 len);
#endif二、各类PID
1. 位置式PID(用于位置环)
测量位置就是通过stm32去采集编码器的脉冲数据,通过脉冲计算出位置(角度)。目标位置和测量位置之间做差这个就是目前系统的偏差。送入 PID 控制器进行计算输出,然后再经过电机驱动的功率放大控制电机的转动去减小偏差, 最终达到目标位置的过程。

















 697
697

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









