




 本文详细介绍了电机的基本概念,包括直流电机(有刷与无刷)、步进电机、伺服电机和舵机等,重点讲解了它们的工作原理、特点和应用场景,突出了直流电机的操控便利性和伺服电机的高精度特性。
本文详细介绍了电机的基本概念,包括直流电机(有刷与无刷)、步进电机、伺服电机和舵机等,重点讲解了它们的工作原理、特点和应用场景,突出了直流电机的操控便利性和伺服电机的高精度特性。
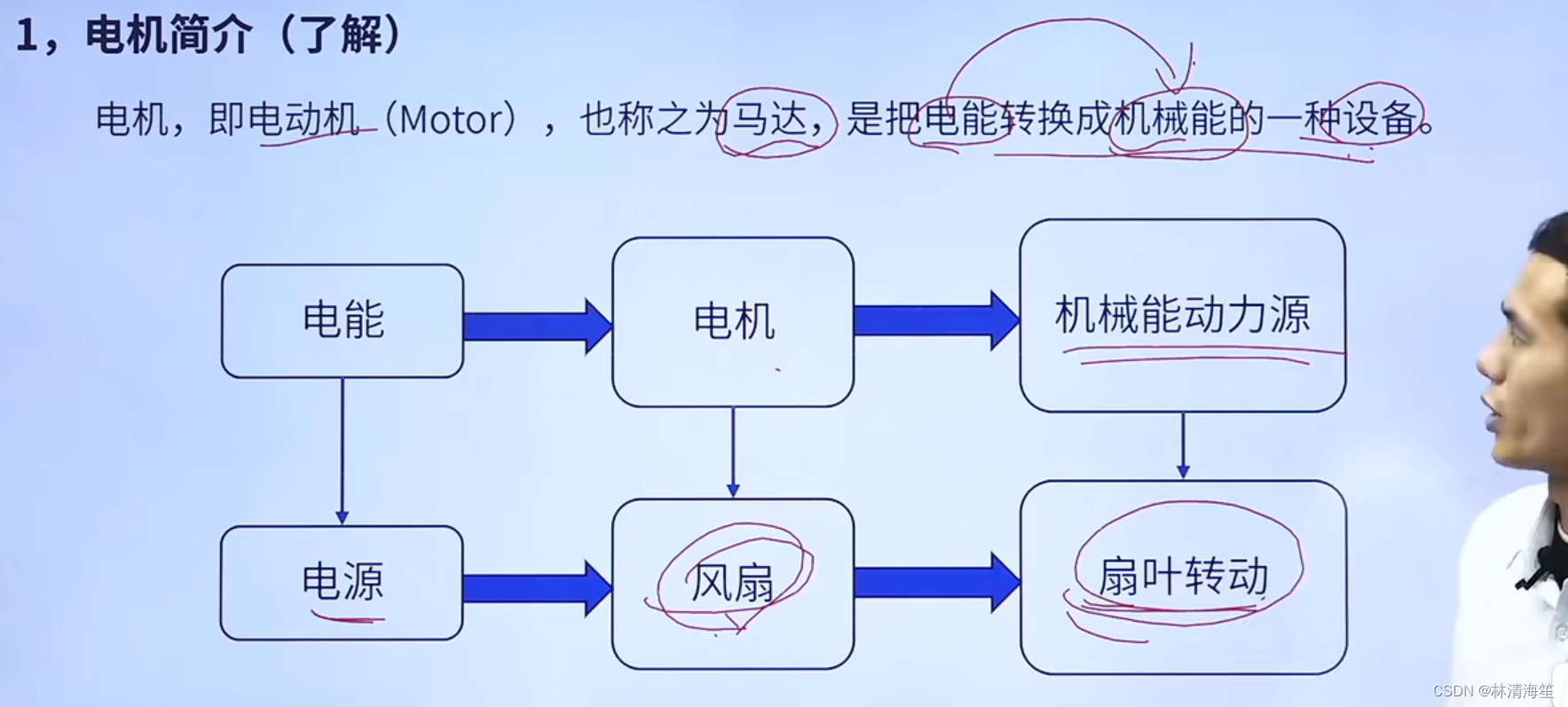
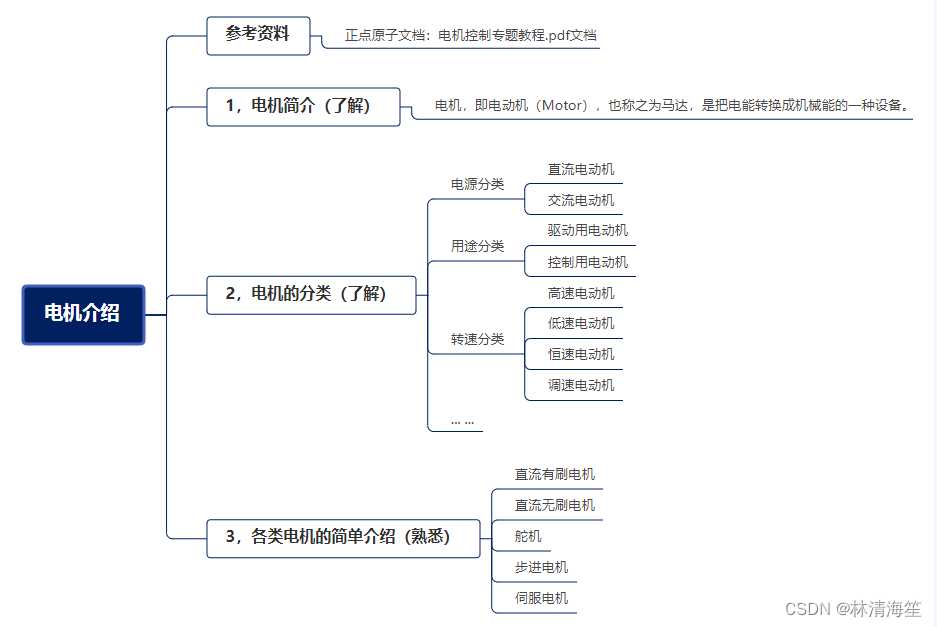
一. 电机简介(了解)
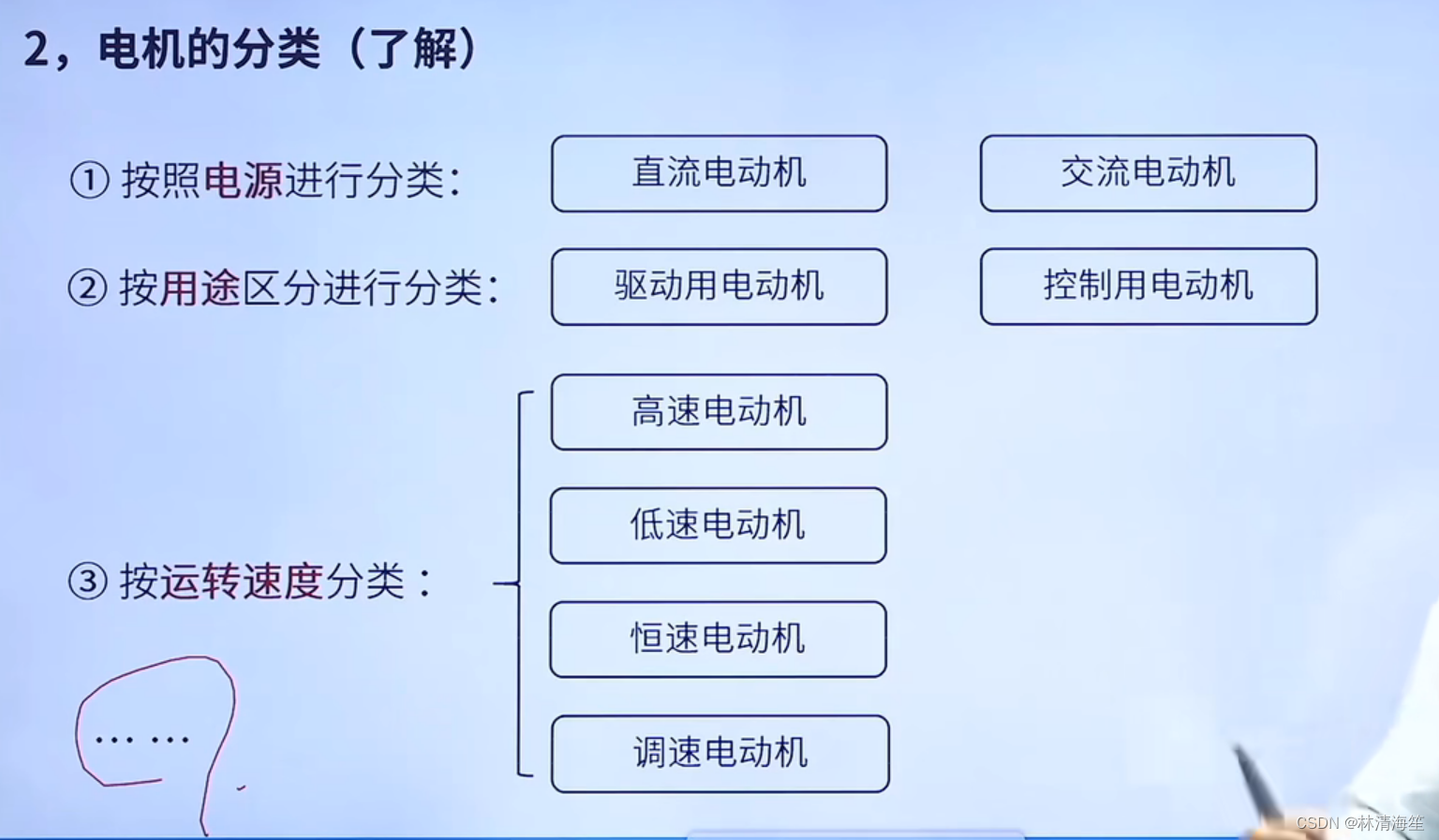
二.电机的分类 (了解)
- 直流电驱动和交流电驱动电动机
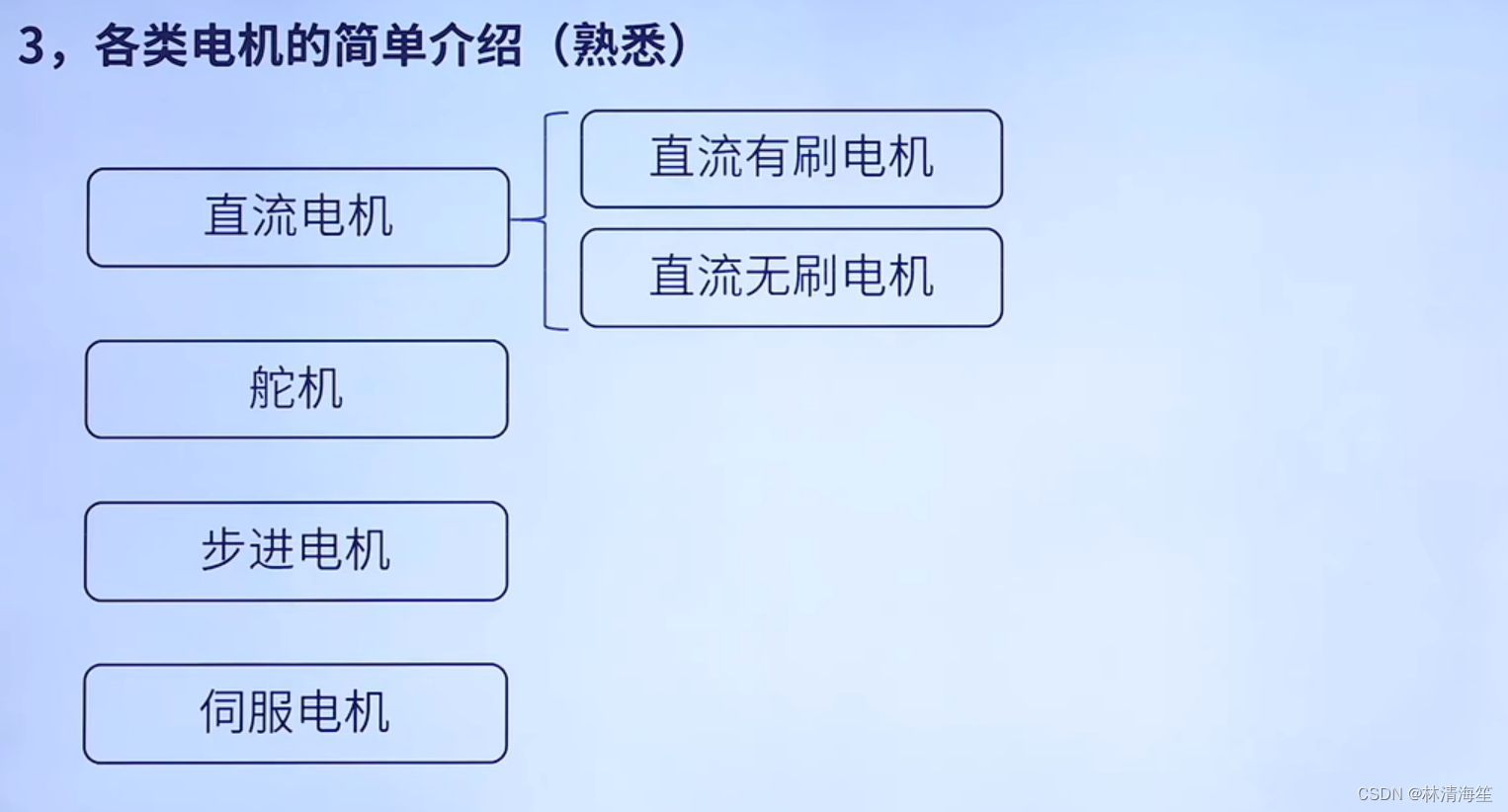
三.各类电机的简单介绍(熟悉)
五种常用的电机
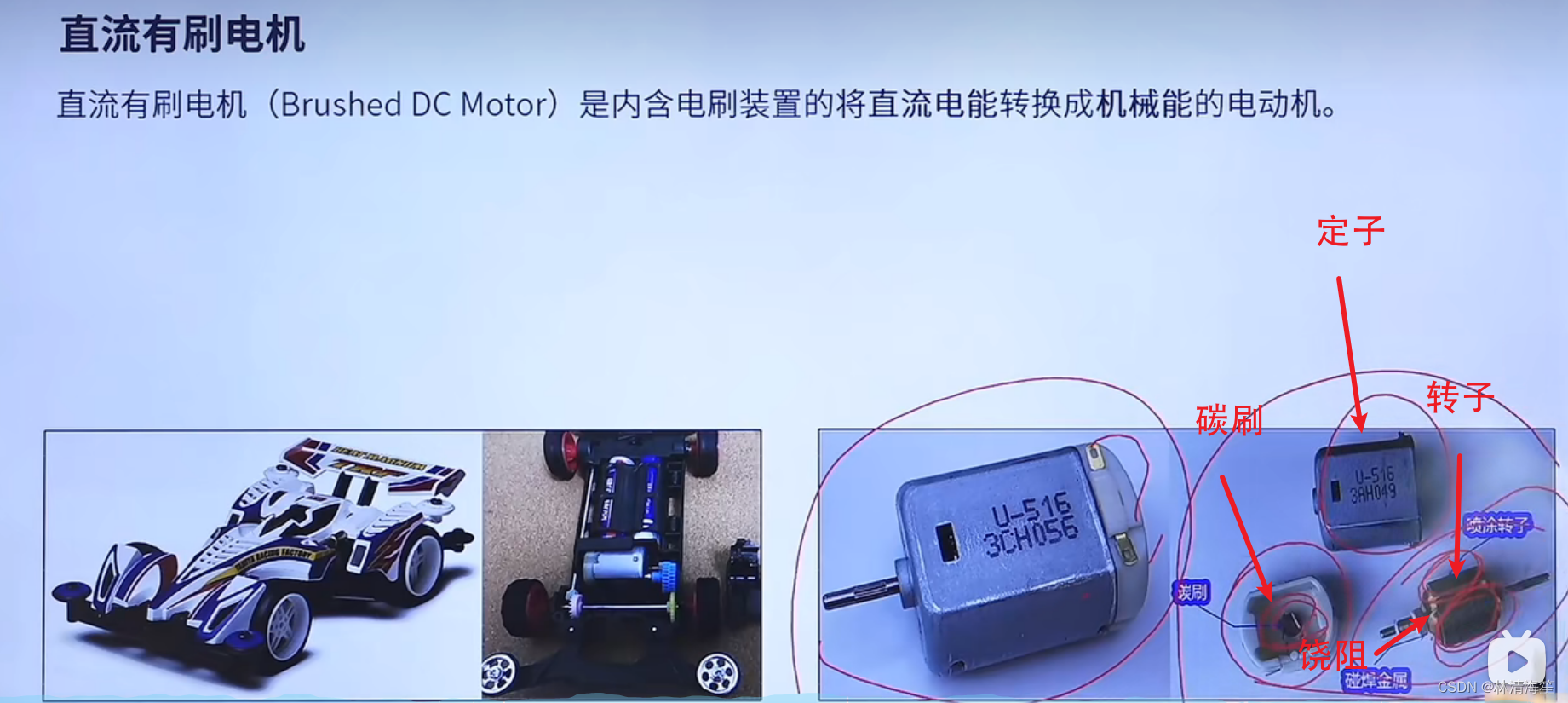
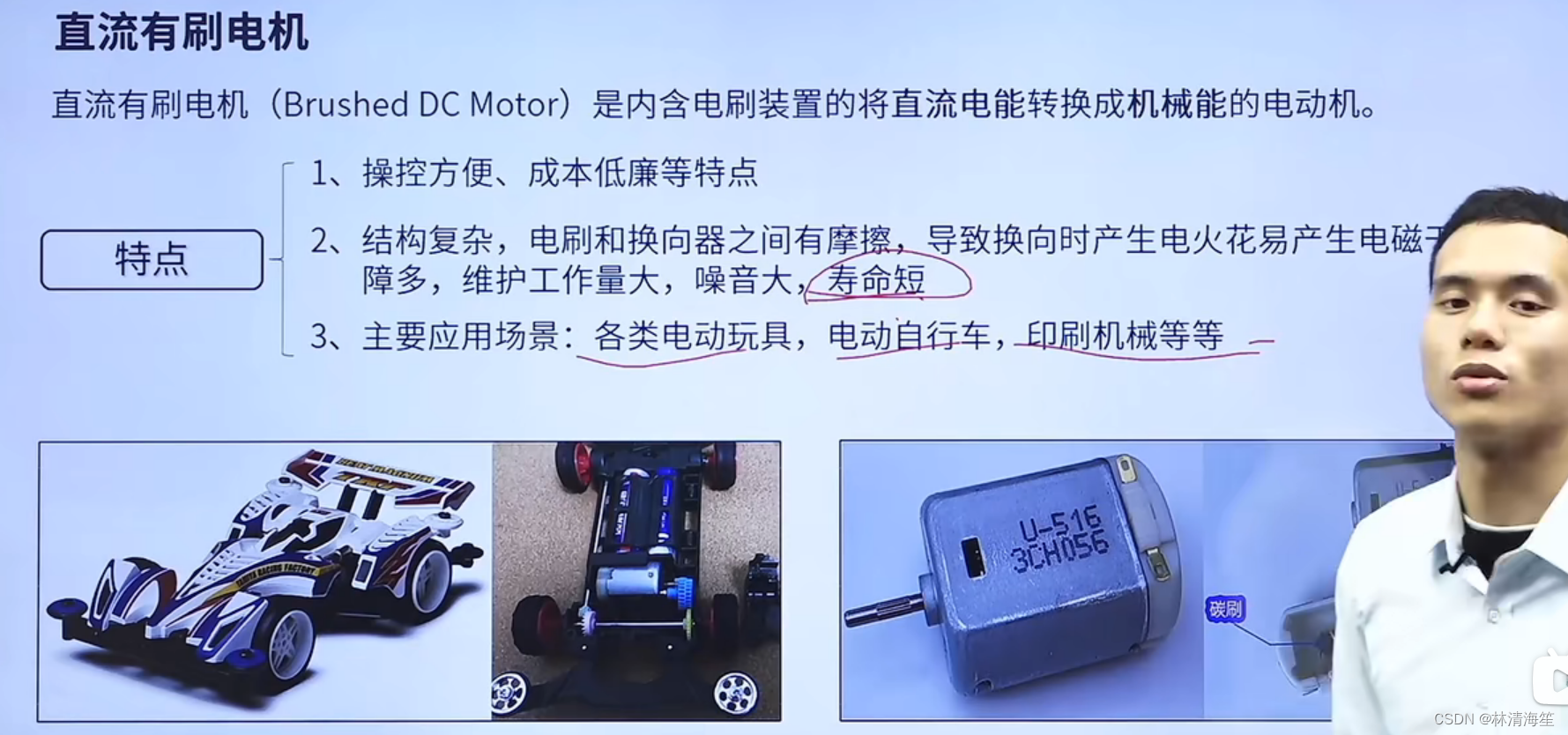
1. 直流有刷电机(BDC)
(1)介绍
Brushed就是刷子的意思。
生活中常见的是赛车,内部有小马达
特点:
1.当电机左边接线端口接正,右边端口接负,就能顺时针转动,如果需要逆时针旋转,那么左边接负,右边接正。所以操纵方便,给大一点的电压就能转得更快一点。
2.内部既有刷子,又有换向器,内部结构复杂。电刷和换向器之间容易产生电火花导致电磁干扰,所以故障相对较多。通常连续工作600-1000个小时就会出现故障。
但是坏了很好维修,因为通常是电刷坏了,只需要更换一个电刷就能让其继续工作起来了,
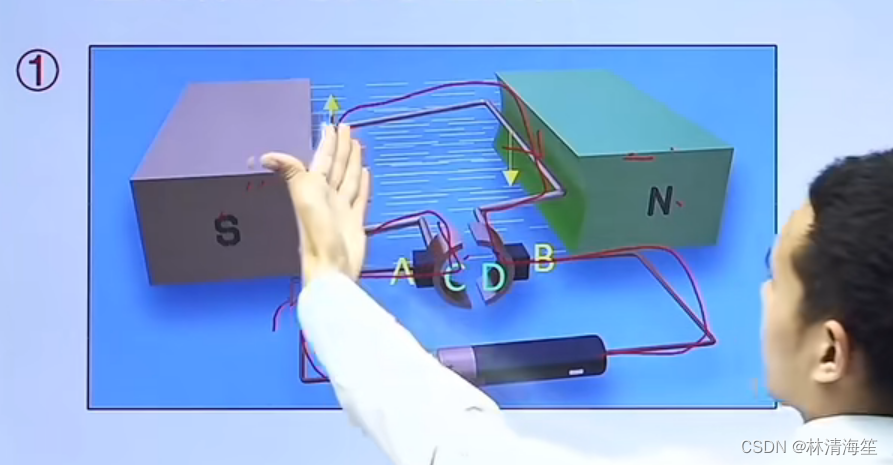
(2)原理流程
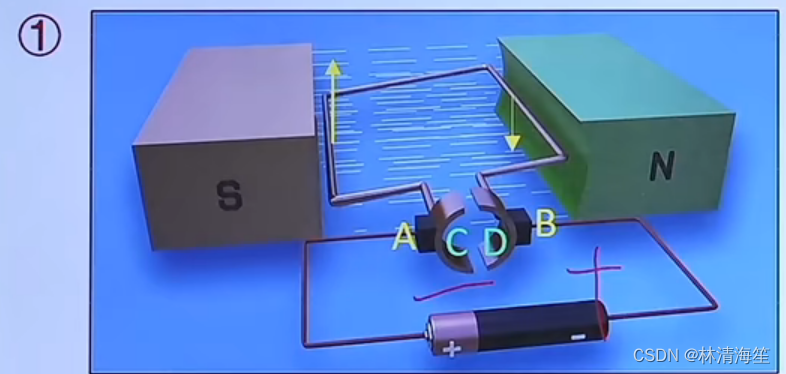
A和B就是碳刷,C和D就是换向器,换向器前面连接的就是转子,图1中简化为一个绕组,S和N就是定子,里面有N极和S极。
当外部接上电源,此时电流流向A,和C接触后,流到绕组上,形成一个闭合回路。
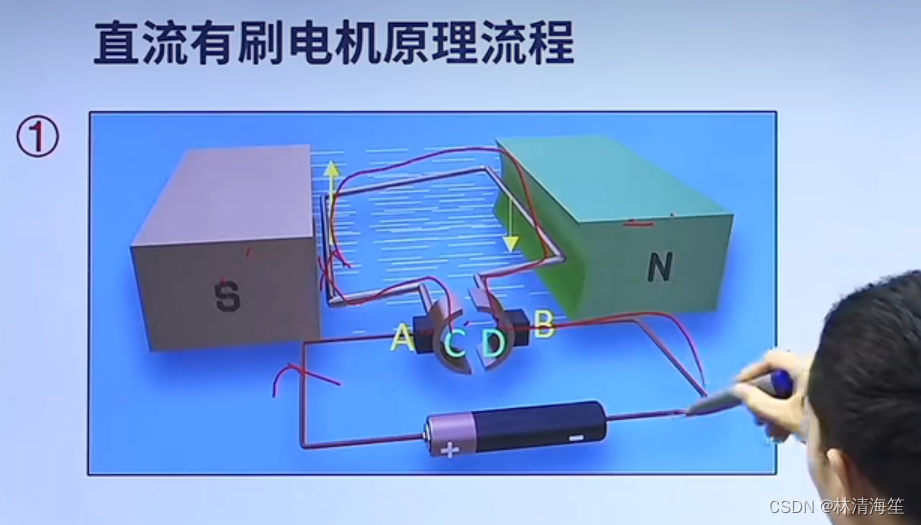
然后使用左手定则,判断绕组的受力方向,掌心由磁导线穿过,由N极指向S极,四指顺着电流的方向,然后大拇指就是导线的受力方向了,就是向上。另一侧导线电流方向相反,所以受力向下,这时候两边就会受到相反的力,一个向上一个向下,导致线圈顺时针旋转起来。
当旋转到中间位置时,由于换向器中间是有空隙的,中间没有与转子发生接触,此时线圈是没有电流的,就不会受到力,但还是会有惯性继续向前。
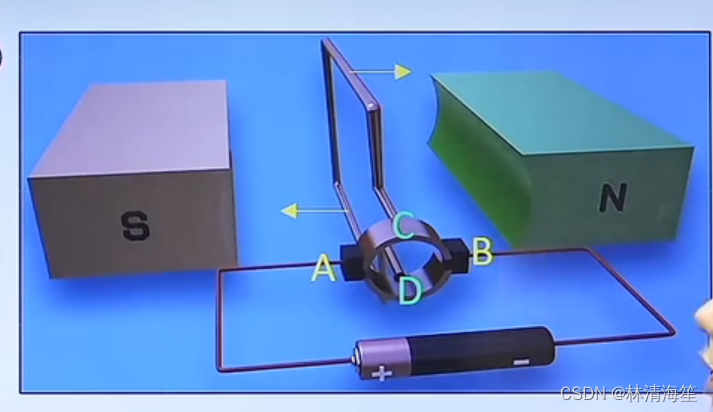
转到另一边的时候,又会受到向上的力和向下的力使线圈转动,就这样循环不断的旋转起来了。
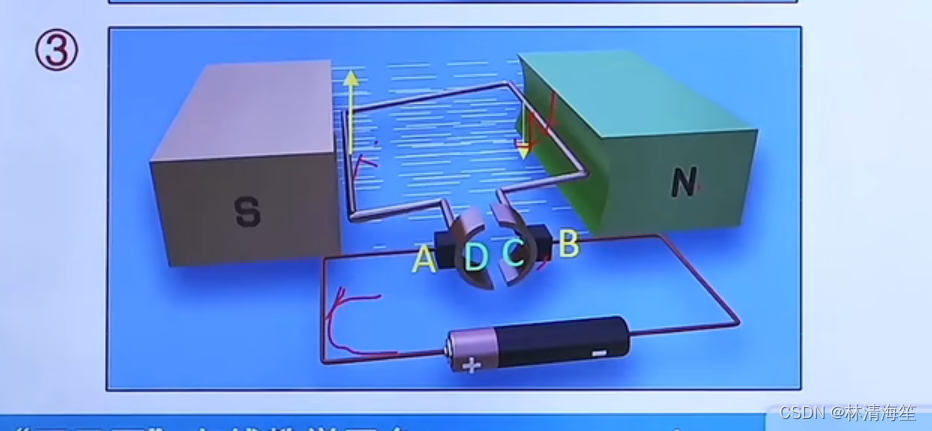
那么如果需要逆时针旋转,那么就将电源正负对调即可。
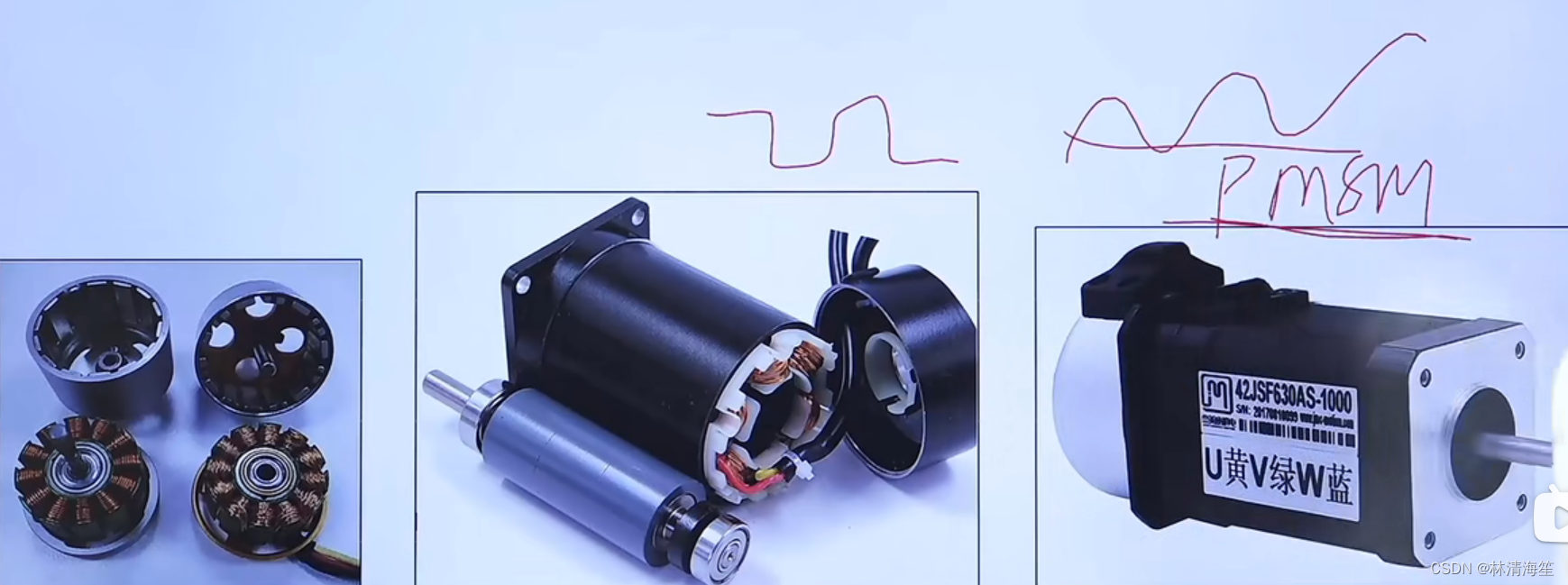
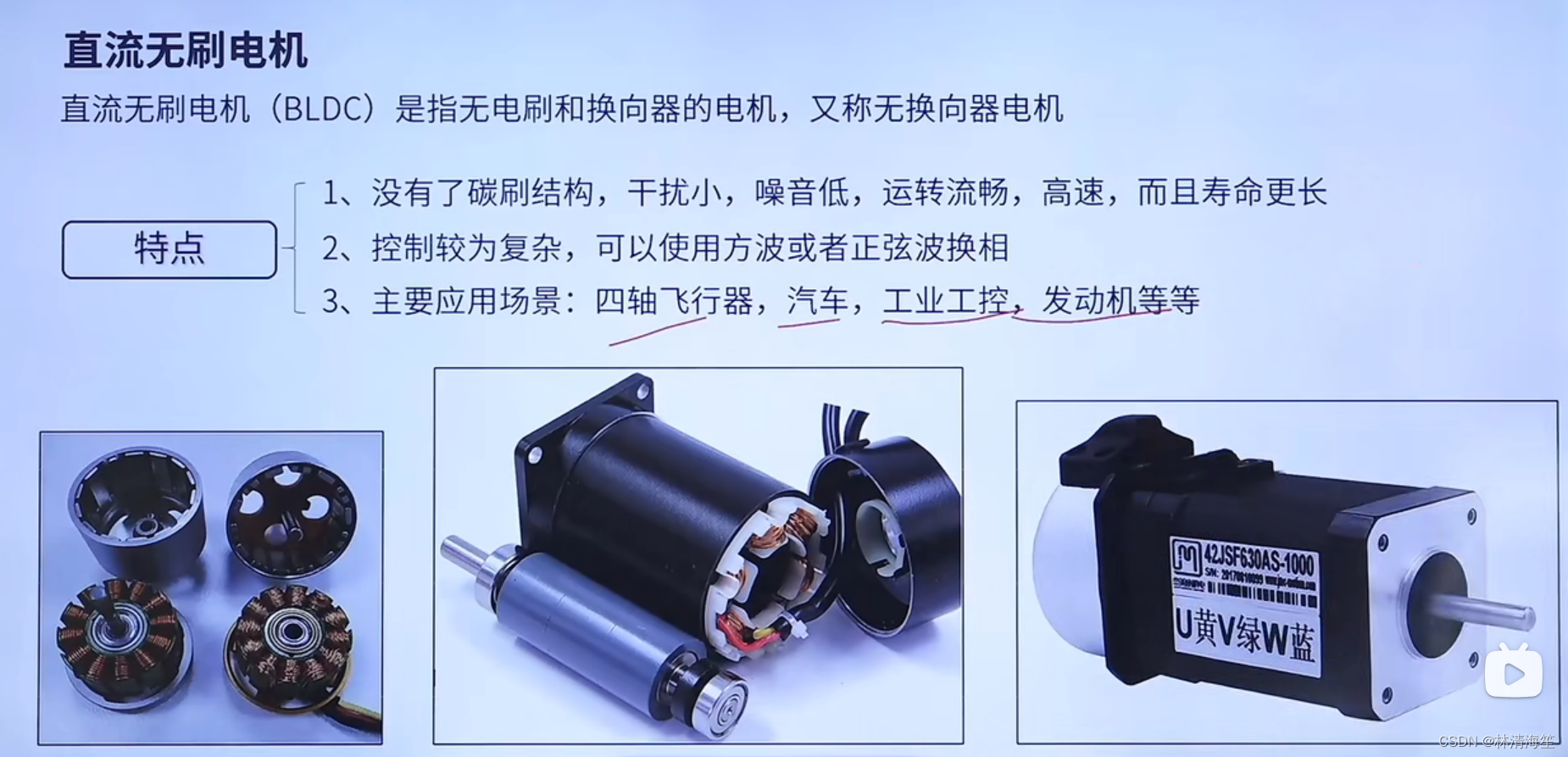
2. 直流无刷电机(BLDC)
(1)介绍
- 没有电刷和换向器的电机。
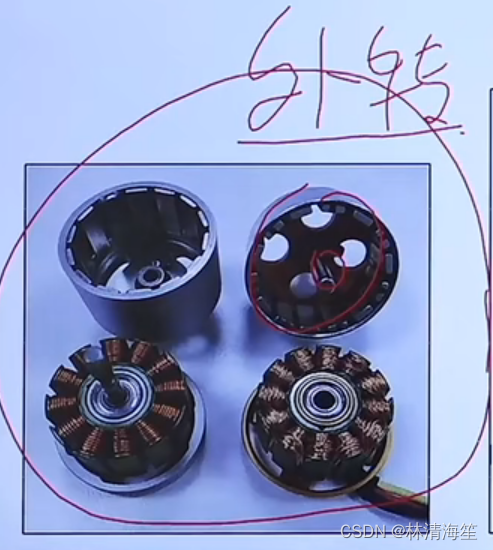
那么无人机上四轴就会运用到图1外转式的直流电机,这是因为其转子和外壳是连接在一起的,也就是你一转动,整个外壳都会跟着旋转(四轴飞行器)
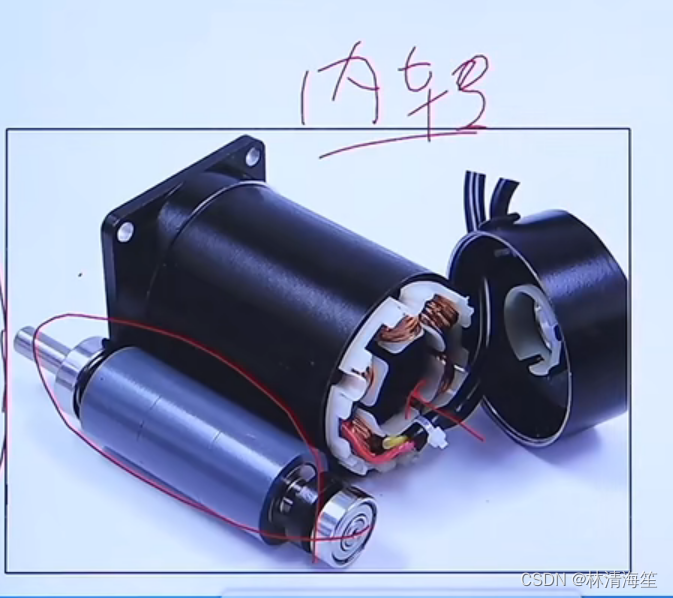
还有一种是内转式的,转子是塞在里面的,转动的时候,只有里面的轴会转动,外面的外壳是不会跟着转动的(工业)
永磁同步电机(PMSM),与前两种电机最大的区别是内部饶阻的区别,还有反电动势不一样,前两种内转式和外转式是方形波(T形波),而PMSM是反电动势是正弦波,正弦波的运转会更加的流畅,而且效率会更高。
(2)特点
1.没有碳刷结构,干扰就小,噪音也低,最大的优点是高速,寿命更长,上万小时以上的寿命。
2.维护比较麻烦,通常一坏掉就要整个都跟着换掉
3.控制比较复杂,方波换相用于控制内转式和外转式的电机,正弦波换相用于PMSM电机(即FOC),难度更加的高。
3. 步进电机
(1)简介
给电机一个脉冲信号,电机就会旋转一定的角度,或者位移一段距离,这一段距离称为一步,也就是一个脉冲对应一步,两个脉冲对应两步。
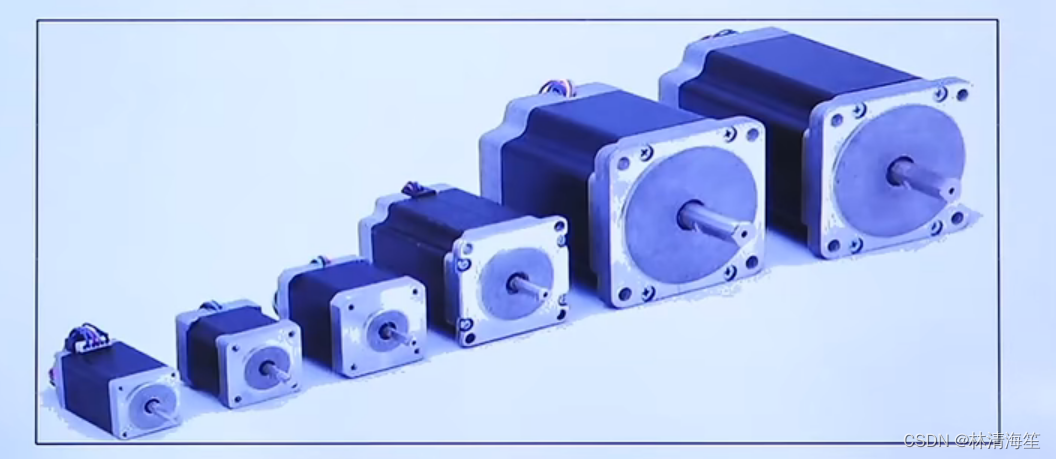
命名都是根据尺寸命名的,比如42电机,就是尺寸为42mm长,
(2)特点
1.控制简单,在低速的情况下,扭矩是非常大的,扭矩越大,所能载动的负载也就越大,这也是电机选型的一个重要特性。
速度只取决于脉冲频率,一个脉冲对应一步,假设在一秒内发射10个脉冲,和一秒内发射100个脉冲,速度会更加的快。但是有一个上限,不能超过最大运行的频率,这不是可以无限往上加的速度。
有多少个脉冲,就对应有多少个角位移。
2.空载启动频率,在不加任何负载的情况下,从停止到运转,最大的频率是多少,是不可以高过这个频率,否则就会出现丢步或者堵转的现象。

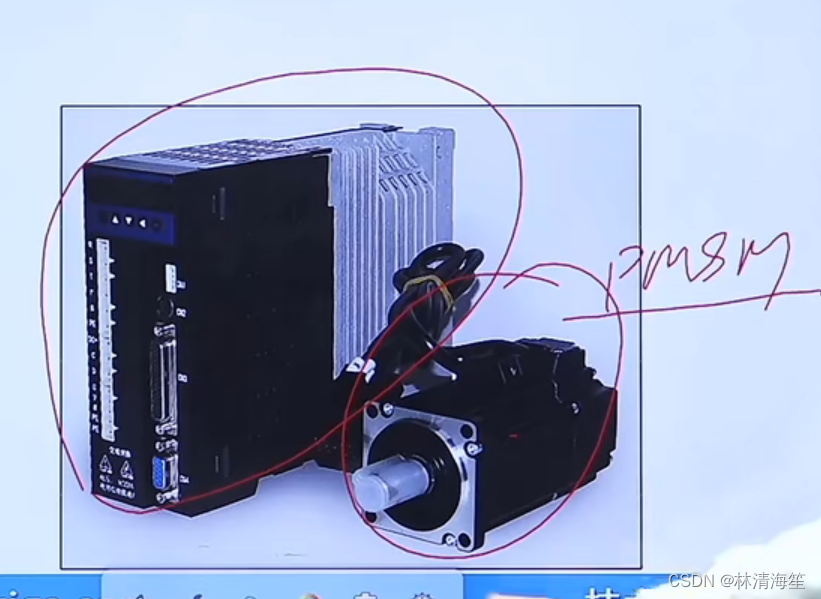
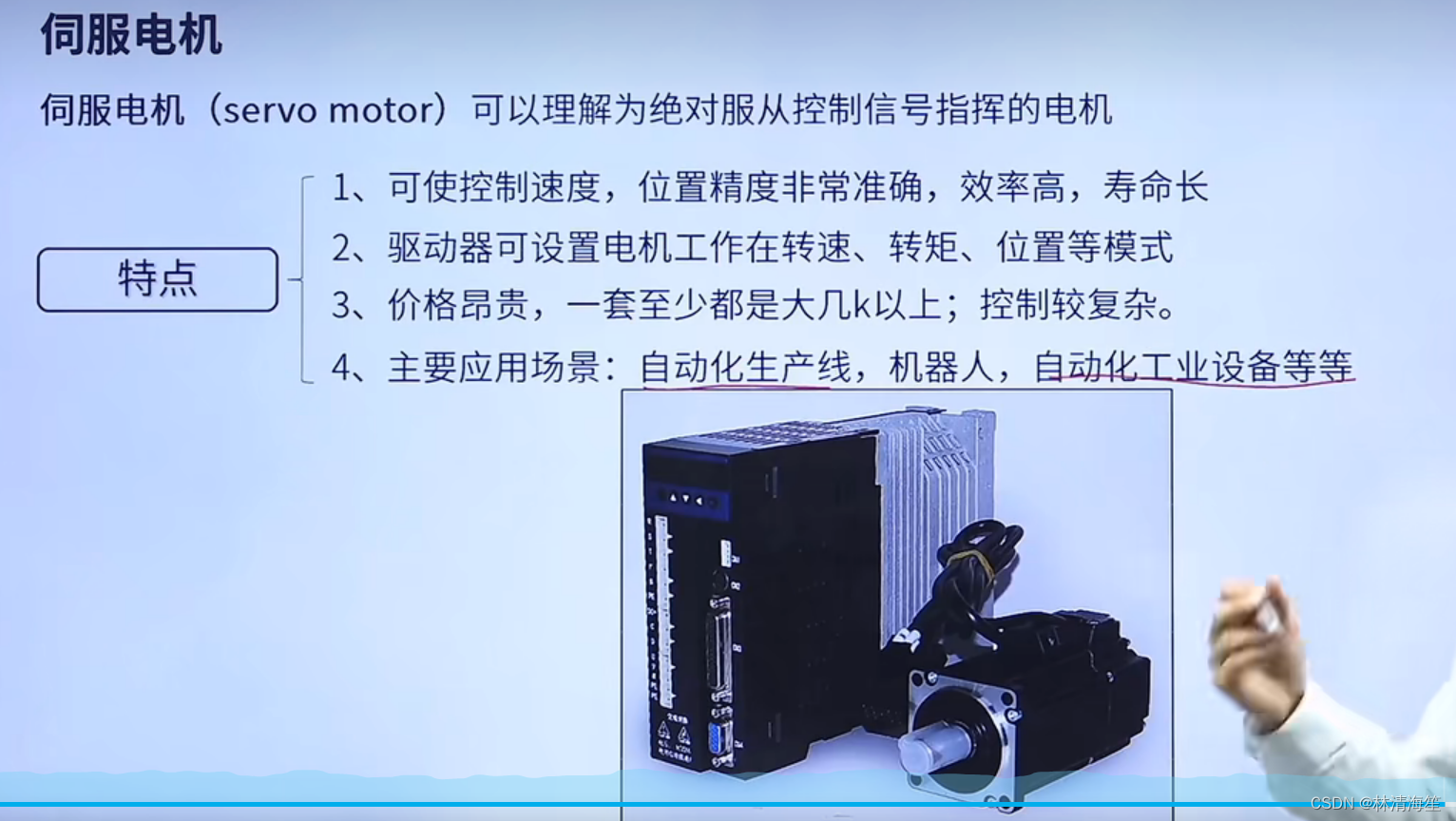
4.伺服电机(servo motor)
(1)简介
servo意为奴隶,比较听话,让其干嘛就干嘛,所以伺服电机就是绝对服从控制信号指挥的电机。

其实物图是比较大的,内部有一个伺服驱动器,一个是伺服电机,也就是永磁同步电机(pmsm)。这两个部分组成伺服系统。
(2)特点
1.控制速度和精度非常高,效率非常高,寿命非常长,
2.价格高。
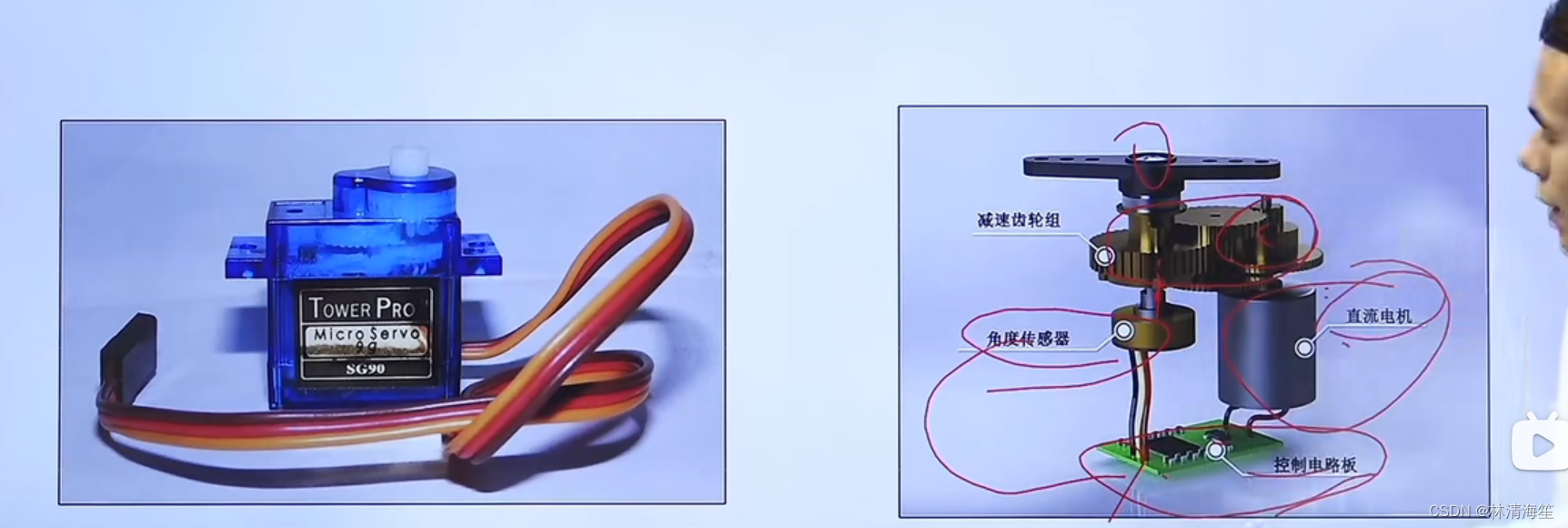
5.舵机(servo)
控制面板给直流电机脉冲信号,直流电机就会转动,然后就会带动减速齿轮组的转轴转动,然后与其相连的角度传感器也会转动,传感器就会把比例电压反馈给控制面板,就能知道当前选择的角度。形成了闭环的回路。
特点:

四.课后总结



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











