







 本文介绍了PID控制算法的基本概念,包括其工作原理和在小车速度控制中的应用。提供了Python代码示例,展示了如何使用增量式和位置式PID控制计算PWM值,并通过vofa软件观察输出。最后,分享了相关代码链接。
本文介绍了PID控制算法的基本概念,包括其工作原理和在小车速度控制中的应用。提供了Python代码示例,展示了如何使用增量式和位置式PID控制计算PWM值,并通过vofa软件观察输出。最后,分享了相关代码链接。
一、任务说明
了解PID、利用PID控制小车速度。
二、PID简介
参考资料:电机控制进阶——PID速度控制_电机 pid 算法-优快云博客
PID 是 Proportional(比例)、Integral(积分)、Differential(微分)的首字母缩写,它是一种结
合比例、积分和微分三个环节于一体的闭环控制算法。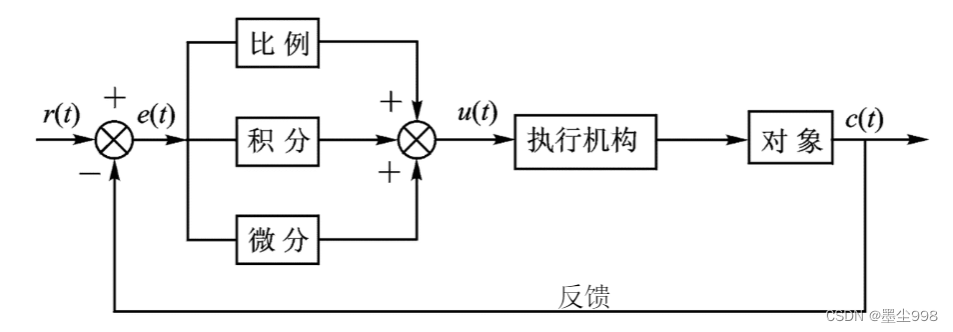
本质:根据输入的偏差值,按照比例、积分、微分的函数关系进行运算,运算结果用以控制输出。
三、编写代码
//PID算法
float target_val=20; //目标值
float error; //本次误差
float err_last1; //上一个误差
float err_last2;
float Kp=6,Ki=20,Kd=2.5; //比例、积分、微分系数 增量式 6 20 2.5
float output_val; //输出值
float pwm_max=899;
float pwm_min=0;
float PWM=0;
//增量式
float PID_control(float val)
{
error = target_val - val; /*误差项:目标值-测量值*/ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1584
1584

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









