






 该博客介绍了如何在ROS环境中创建机器人模型,包括新建功能包,编写URDF文件来描述机器人结构,然后在launch文件中集成URDF与Rviz进行模型显示。作者详细阐述了每个步骤,从工作空间初始化、创建依赖,到urdf和xacro文件的编写,最后在Rviz中成功显示机器人模型并进行了坐标系调整。这是一个关于ROS机器人建模和可视化的实践教程。
该博客介绍了如何在ROS环境中创建机器人模型,包括新建功能包,编写URDF文件来描述机器人结构,然后在launch文件中集成URDF与Rviz进行模型显示。作者详细阐述了每个步骤,从工作空间初始化、创建依赖,到urdf和xacro文件的编写,最后在Rviz中成功显示机器人模型并进行了坐标系调整。这是一个关于ROS机器人建模和可视化的实践教程。
实现流程:
-
准备:新建功能包,导入依赖
-
核心:编写 urdf 文件
-
核心:在 launch 文件集成 URDF 与 Rviz
-
在 Rviz 中显示机器人模型
1.创建工作空间并初始化
mkdir -p demo03/src
cd demo03
catkin_make
2.进入 src 创建 ros 包并添加依赖(通过vs code来进行)
urdf xacro
创建功能包,导入依赖
创建一个新的功能包,名称自定义,导入依赖包:urdf与xacro
在当前功能包下,再新建4个目录:
urdf: 存储 urdf 文件的目录
meshes:机器人模型渲染文件(暂不使用)
config: 配置文件
launch: 存储 launch 启动文件
在urdf文件夹下新建urdf 和 xacro 文件夹
然后在子urdf文件夹下新建文件 demo01_helloworld.urdf
<robot name="mycar">
<link name="base_link">
<visual>
<geometry>
<box size="0.5 0.2 0.1" />
</geometry>
</visual>
</link>
</robot>
在launch文件夹下新建文件 demo01helloworld.launch
<launch>
<!-- 设置参数 -->
<param name="robbot_discription" textfile="$(find urdf01_rviz)/urdf/urdf/demo01_helloworld.urdf"/>
<!-- 设置参数 -->
<node pkg="rviz" type="rviz" name="rviz"/>
</launch>
3.编译并运行
vscode中新建终端
source ./devel/setup.bash
roslaunch urdf01_rviz demo01_helloworld.launch
打开rviz
插入小方块
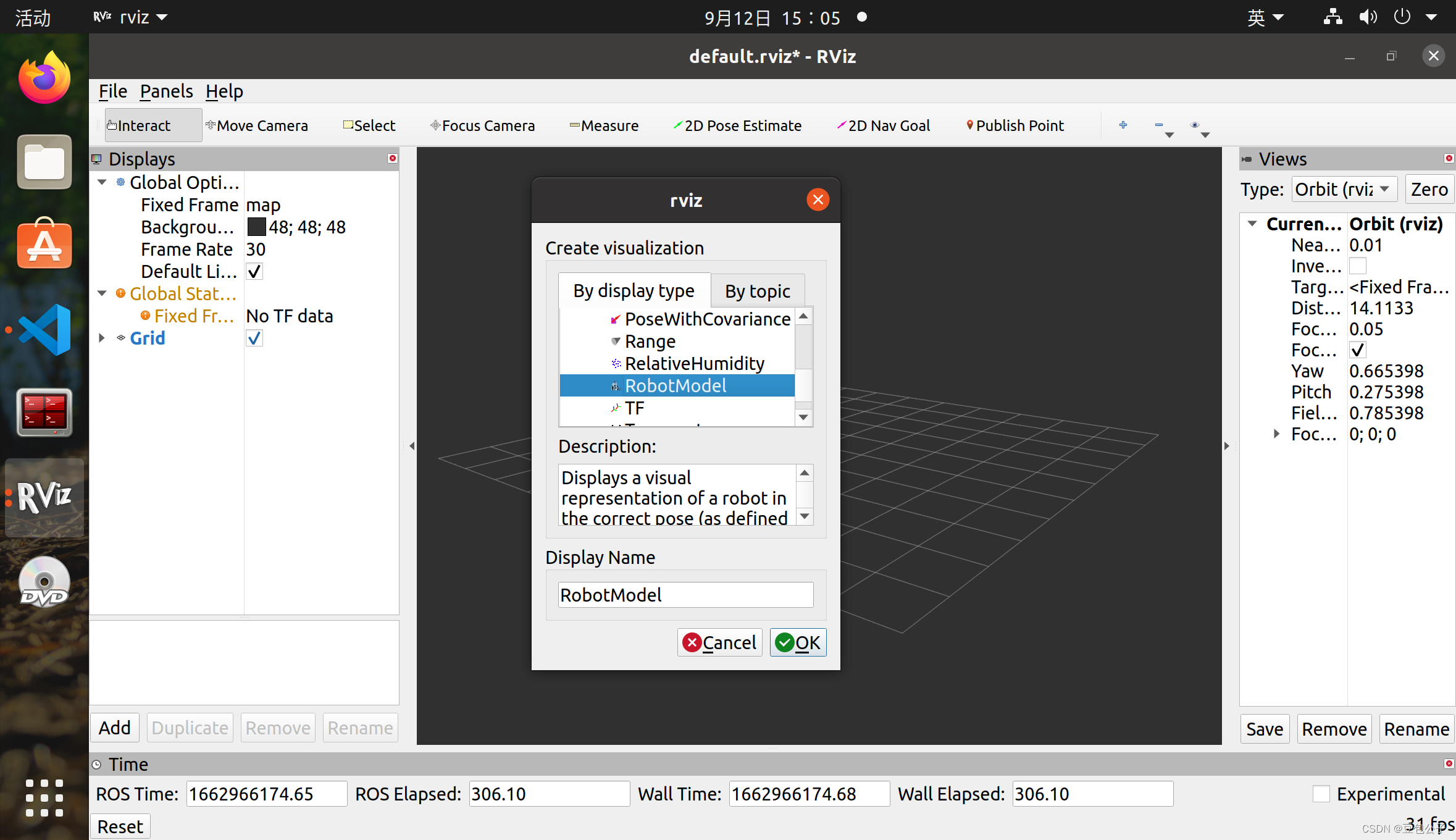
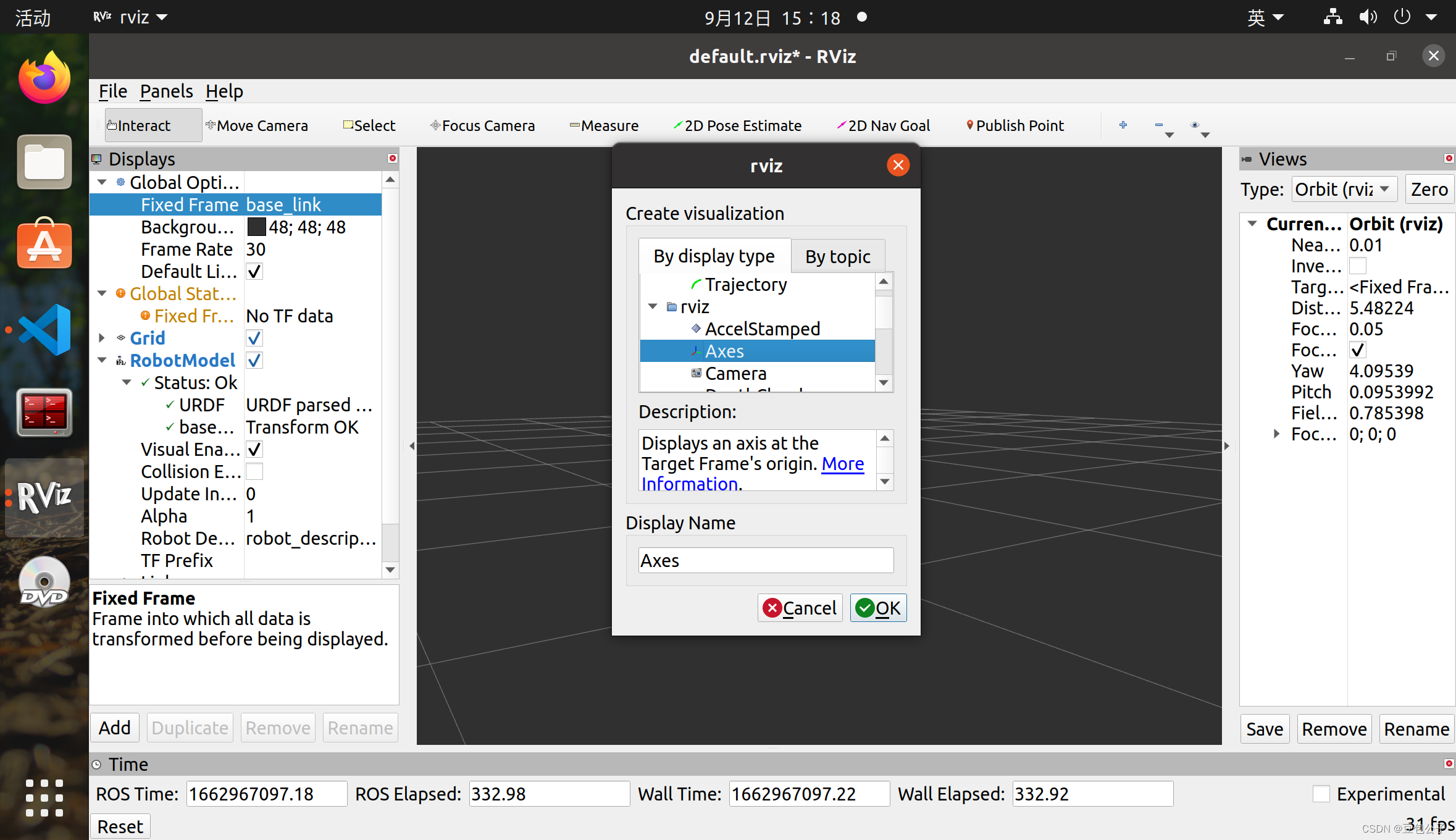
但坐标系有问题,将Fixed Frame 更改为 base_link
并插入坐标系
5.优化 rviz 启动

















 901
901

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









