







© Fu Xianjun. All Rights Reserved.
几何变换
几何变换是指一幅图像映射到另外一幅图像内的操作。OpenCV提供了多个与映射有关的函数,这些函数使用起来方便灵活,能够高效地完成图像映射。
根据OpenCV函数的不同,将映射关系划分为缩放、翻转、仿射变换、透视、重映射等。
提示:以下是本篇文章正文内容,下面案例可供参考
一、缩放
使用函数cv2.resize()来实现对图像的缩放。
形式为:dst = cv2.resize(src, dsize [, fx [, fy [, interpolation] ] ] )
- dst代表输出的目标图像,该图像的类型与src相同,其大小为dsize(当值非零),或者通过src.size()、fx、fy计算得到。
- src代表需要缩放的原始图像。
- dsize代表输出图像大小。
- fx代表水平方向的缩放比例。
- fy代表垂直方向的缩放比例。
- interpolation代表插值方式。
(示例):将图片宽变成0.9倍,长变成0.8倍
代码如下(示例):
import cv2
import numpy as np
img=cv2.imread("pig.jpg")
rows,cols,_ = img.shape
size1 = (int(rows*0.9),int(cols*0.8))
img_resize1 = cv2.resize(img,size1)
cv2.imshow("SRC",img)
cv2.imshow("RESIZE1",img_resize1)
cv2.waitKey(0)
cv2.destroyAllWindows()- 当缩小图像时,使用区域插值方式(INTER_AREA)能够得到最好的效果;当放大图像时,使用三次样条插值(INTER_CUBIC)方式和双线性插值(INTER_LINEAR)方式都能够取得较好的效果。
二、翻转
使用函数cv2.flip()来实现对图像的翻转,水平翻转、垂直翻转、两个方向同时翻转。
形式为:dst = cv2.flip(src, flipCode)
- dst代表和原始图像具有同样大小、类型的目标图像。
- src代表需要处理的原始图像。
- flipCode代表旋转类型。
flipCode参数的意义:
| 参数值 | 说明 | 意义 |
|---|---|---|
| 0 | 只能是0 | 绕着X轴转 |
| 正数 | 1、2、3等任意正数 | 绕着Y轴转 |
| 负数 | -1、-2、-3等任意负数 | 围绕X、Y轴同时翻转 |
(示例):绕x轴翻转
代码如下(示例):
img_flip1=cv2.flip(img,0)#x轴翻转
cv2.imshow("FLIP1",img_flip1)
cv2.waitKey(0)
cv2.destroyAllWindows()三、图像仿射变换
函数cv2.warpAffine()实现仿射变换。
其语句为:dst = cv2.warAffine(src , M , dsize)
- src代表要仿射的原始图像。
- M代表一个2x3的变换矩阵。使用不同的变换矩阵,就可以实现不同的仿射变换。
- dsize代表输出图像的尺寸大小。
1.平移
代码如下(示例):
rows,cols,_ = img.shape
x = 100
y = 200
M = np.float32([[1,0,x],[0,1,y]])
img_move=cv2.warpAffine(img,M,(cols,rows))
cv2.imshow("MOVE",img_move)
cv2.waitKey(0)
cv2.destroyAllWindows()2.旋转
语法:retval = cv2.getRotationMatrix2D(center,anle,scale)
- center:旋转中心
- angle:旋转角度,正数为逆时针旋转,负数为顺时针旋转
- scale:缩放大小
代码如下(示例):
height,width,_ = img.shape
M = cv2.getRotationMatrix2D((width/2, height/2), 45, 0.6)
img_rotate=cv2.warpAffine(img,M,(width, height))
cv2.imshow("ROTATE",img_rotate)
cv2.waitKey(0)
cv2.destroyAllWindows()四、透视
语法1:转换矩阵 M = cv2.getPerspectiveTransform(pts_o, pts_d)
- pts_o为原始4个点坐标。
- pts_d为变换后4个点坐标。
语法2:dst = cv2.warpPerspective(img, M, dsize)
- img为原图。
- dst为变换后的图。
- M为转换矩阵。
- dsize为变换后图像的大小。
代码如下(示例):
img = cv2.imread('shudu.jpg')
rows, cols,_ = img.shape
pts_o = np.float32([[88, 177], [716, 85], [216, 695], [957, 551]])
pts_d = np.float32([[0, 0], [600, 0], [0, 600], [600, 600]])
M = cv2.getPerspectiveTransform(pts_o, pts_d)
dst = cv2.warpPerspective(img, M, (600, 600))
cv2.imshow('img', img)
cv2.imshow('dst', dst)
cv2.waitKey(0)
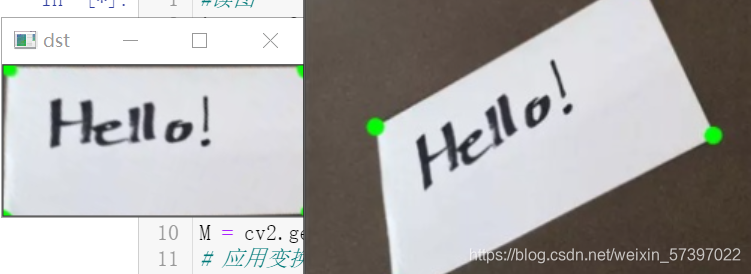
cv2.destroyAllWindows()小例题
将图像通过透视变换矫正
代码如下(示例):
#读图
img = cv2.imread('lianxi.png')
rows, cols = img.shape[:2]
# 原始点阵
pts_o = np.float32([[45, 180], [220, 80], [60, 290], [270, 190]])
pts_d = np.float32([[0, 0], [200, 0], [0, 100], [200, 100]])
# 获取转换矩阵
M = cv2.getPerspectiveTransform(pts_o, pts_d)
# 应用变换
dst = cv2.warpPerspective(img, M, (200, 100))
cv2.imshow('img', img)
cv2.imshow('dst', dst)
cv2.waitKey(0)
cv2.destroyAllWindows()效果如下(示例):


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









