







 本文介绍了NuImages数据集的下载、数据结构、属性、校准传感器等信息,并探讨了mmdetection3D在该数据集上的训练方法,包括类别映射、实例分割模型及转换数据集到COCO格式的步骤。
本文介绍了NuImages数据集的下载、数据结构、属性、校准传感器等信息,并探讨了mmdetection3D在该数据集上的训练方法,包括类别映射、实例分割模型及转换数据集到COCO格式的步骤。

Nuimages 数据介绍和mmdet3d训练方法
Nuimages 数据集下载
地址:
https://nuscenes.org/nuimages
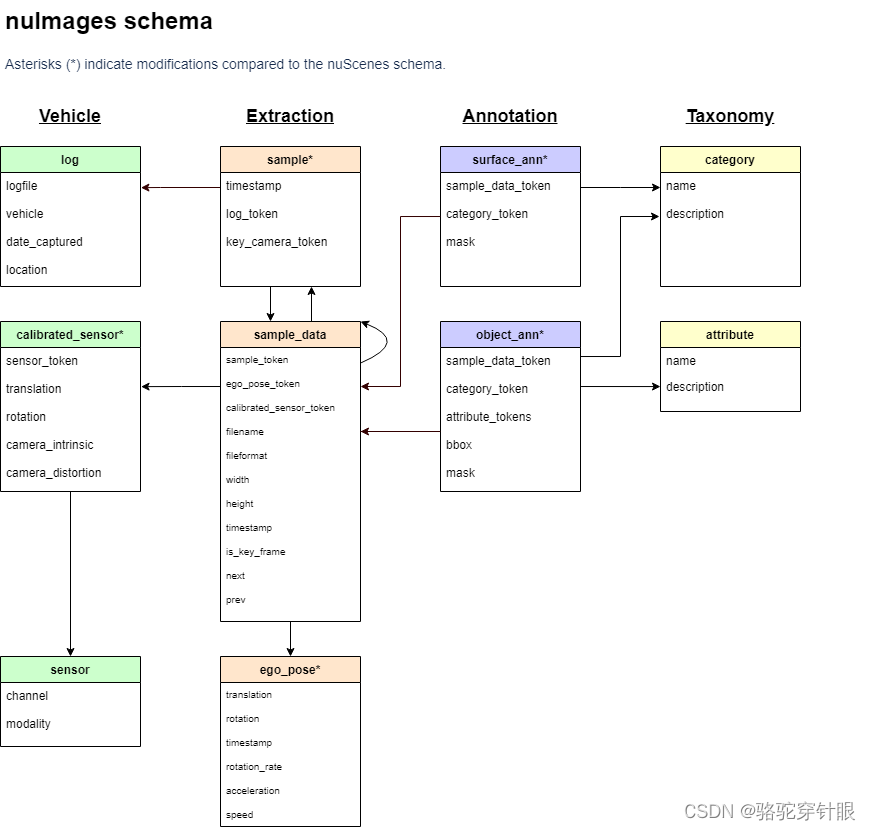
数据结构
属性
属性是实例的一种属性,它可以在类别不变的情况下发生变化。例如:车辆停放/停止/移动,以及自行车是否有骑手。nuImages 中的属性是 nuScenes 中属性的
attribute {
"token": <str> -- Unique record identifier.
"name": <str> -- Attribute name.
"description": <str> -- Attribute description.
}
校准传感器
在特定车辆上校准的特定摄像机的定义。所有外在参数都是根据自我车身框架给出的。与 nuScenes 相反,所有摄像机图像都是扭曲和未校正的。
calibrated_sensor {
"token": <str> -- Unique record identifier.
"sensor_token": <str> -- Foreign key pointing to the sensor type.
"translation": <float> [3] -- Coordinate system origin in meters: x, y, z.
"rotation": <float> [4] -- Coordinate system orientation as quaternion: w, x, y, z.
"camera_intrinsic": <float> [3, 3] -- Intrinsic camera calibration. Empty for sensors that are not cameras.
"camera_distortion": <float> [5 or 6] -- Camera calibration parameters [k1, k2, p1, p2, k3, k4]. We use the 5 parameter camera convention of the CalTech camera calibration toolbox, that is also used in OpenCV. Only for fish-eye lenses in CAM_BACK do we use the 6th parameter (k4).
}
类别
物体类别分类法(如车辆、人体)。子类别以句号划分(如 human.pedestrian.adult )。nuImages 中的类别与 nuScenes(w/o lidarseg)中的类别相同,外加 flat.driveable_surface 。
category {
"token": <str> -- Unique record identifier.
"name": <str> -- Category name. Subcategories indicated by period.
"description": <str> -- Category description.
}
ego_pose 自车定位
特定时间戳下的自我车辆姿态。以日志地图的全球坐标系给出。自我姿态是我们论文中描述的基于激光雷达地图的定位算法的输出结果。定位是 x-y 平面上的二维定位。警告:nuImages 收集自近 500 个不同地图版本的日志。因此,不应对不同日志的坐标进行比较,也不能在 nuScenes 的语义地图上进行渲染。
ego_pose {
"token": <str> -- Unique record identifier.
"translation": <float> [3] -- Coordinate system origin in meters: x, y, z. Note that z is always 0.
"rotation": <float> [4] -- Coordinate system orientation as quaternion: w, x, y, z.
"timestamp": <int> -- Unix time stamp.
"rotation_rate": <float> [3] -- The angular velocity vector (x, y, z) of the vehicle in rad/s. This is expressed in the ego vehicle frame.
"acceleration": <float> [ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1575
1575

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









