









DCF的标准公式使用循环相关,这允许通过快速傅立叶变换(FFT)有效地实现学习。然而,FFT要求滤波器和搜索区域大小相等,这限制了检测范围。由于循环移位特性,滤波器在包含不现实的、环绕循环移位的目标的许多模板山被训练。减少开窗问题的一种简单方法是从更大的区域学习滤波器。然而,由于该区域中的大面积背景,DCF的跟踪性能显著下降。
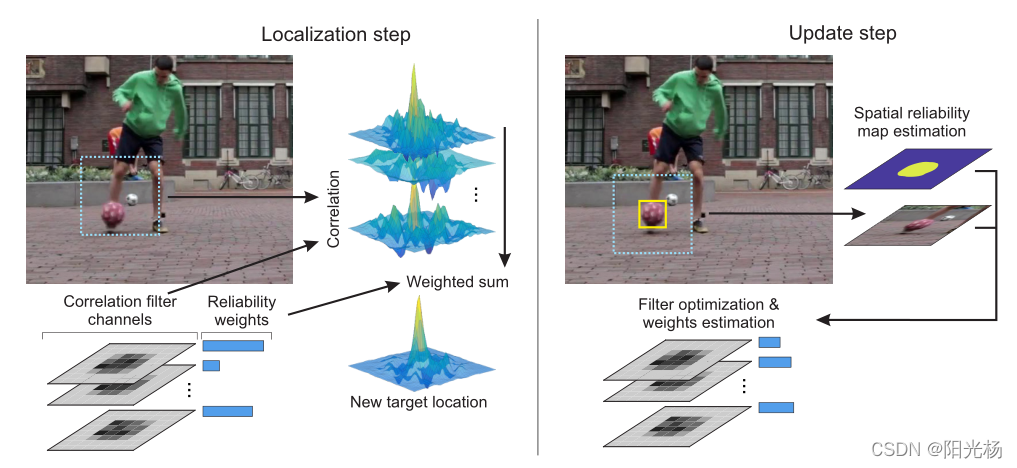
本文提出了一种空间可靠性与通道可靠性去解决上述问题,如图所示:
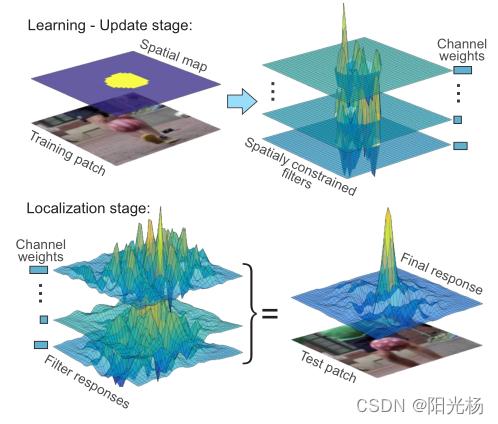
上面一行对应空间可靠性,下面一行对应通道可靠性。空间可靠性利用了一个mask矩阵从而可以实现搜索区域的任意大小,并且文中还采用了图像分割的思想将不规则目标的特征提取出来。
通道可靠性引入了一个通道权重矩阵W(每个特征通道的辨别能力的缩放因子),并且在定位阶段运用于计算相关响应,这个权重矩阵可以有效降低加权平均滤波器响应的噪声。
下面我们先介绍如何求M和W:
求解mask矩阵:
这里引入了一个全概率公式:
注意:这里涉及到了很多概率论的知识,不了解的话可以参考这篇文章:
其中![]() 是一个观察值,表示的是在训练区域第i个像素的颜色
是一个观察值,表示的是在训练区域第i个像素的颜色![]() 和位置
和位置![]()
c表示前景/背景的颜色直方图c = {cf,cb}。mi ∈ {0,1}是表示未知前景/背景标签的随机变量。(我认为这里的m跟掩码的原理差不多,目标出为1,背景处为0)
我们可以根据这张图理解这个公式
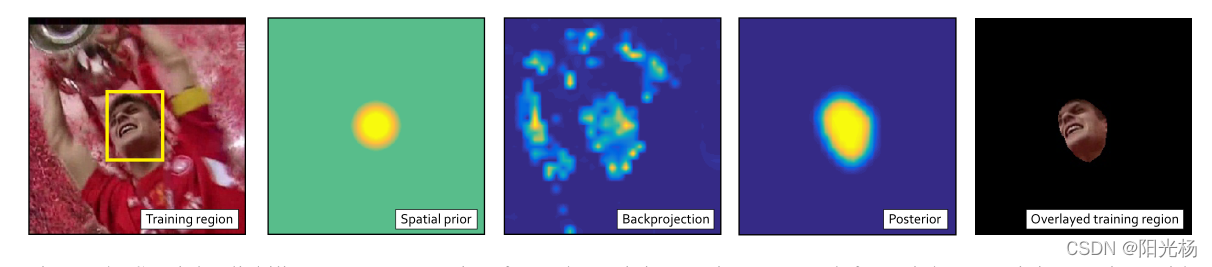
![]() 是一个先验概率,由前景/背景直方图提取的区域大小之间的比率来定义。
是一个先验概率,由前景/背景直方图提取的区域大小之间的比率来定义。
![]() 表示搜索区域的位置的概率,也可以叫做空间可能性,靠近目标中间的部分概率大,其他概率很小,对应与第二副图。由于远离中心的像素同样可能属于对象或背景,所以作者利用一个Epanechnikov核函数进行中心位置的加强。
表示搜索区域的位置的概率,也可以叫做空间可能性,靠近目标中间的部分概率大,其他概率很小,对应与第二副图。由于远离中心的像素同样可能属于对象或背景,所以作者利用一个Epanechnikov核函数进行中心位置的加强。
![]() 表示的是外观可能性,通过贝叶斯规则从对象前景/背景颜色模型cf和cb中计算得到。对应与第三幅图。
表示的是外观可能性,通过贝叶斯规则从对象前景/背景颜色模型cf和cb中计算得到。对应与第三幅图。
![]() 与
与![]() 相乘就会得到第四张图,这里用到了马尔可夫随机场正则化(MRF),然后将其二值化后(mask矩阵)再作用域第一幅图(目标区域),就会得到最后一幅图,这里用到了图像分割的思想,并没有直接采用目标区域的矩形框,而是利用的目标的不规则区域作为特征提取。
相乘就会得到第四张图,这里用到了马尔可夫随机场正则化(MRF),然后将其二值化后(mask矩阵)再作用域第一幅图(目标区域),就会得到最后一幅图,这里用到了图像分割的思想,并没有直接采用目标区域的矩形框,而是利用的目标的不规则区域作为特征提取。
求解通道权重矩阵W:
信道可靠性w反映了每个信道在目标定位阶段的重要性。它包括两种类型的可靠性度量:(I)在滤波器学习阶段计算的信道学习可靠性![]() ,(ii)在目标定位阶段计算的信道检测可靠性
,(ii)在目标定位阶段计算的信道检测可靠性![]() 。
。
联合信道可靠性![]() 被计算为两个可靠性度量的乘积:
被计算为两个可靠性度量的乘积:
![]()
信道学习可靠性![]() 的直接测量是学习信道滤波器的最大响应值,计算如下:
的直接测量是学习信道滤波器的最大响应值,计算如下:
![]()
信道检测可靠性![]() 为:
为:
![]()
![]() 表示的是基于通道响应中第二个和第一个最高非相邻峰值之比,这两个最大峰值是在3×3非最大值抑制后获得的两个最大值。该比率不利于多个相似物体出现在目标附近的情况,所以为了解决这种情况,不允许最终值低于0.5。
表示的是基于通道响应中第二个和第一个最高非相邻峰值之比,这两个最大峰值是在3×3非最大值抑制后获得的两个最大值。该比率不利于多个相似物体出现在目标附近的情况,所以为了解决这种情况,不允许最终值低于0.5。
学习阶段:
传统DCF的目标函数为:
它是将各个通道的响应求和,再与期望输出求二范数,这样会导致一些通道可能会抑制其他通道一个数量级,如下图所示:
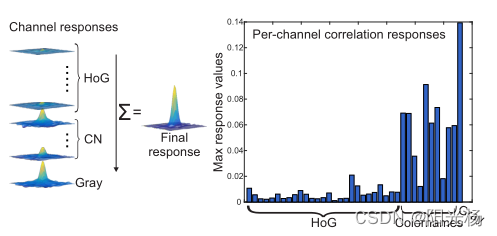
本文为了消除这种问题,独立考虑每个通道,其目标函数如下:
利用ADMM迭代法对这个目标函数进行优化,利用![]() 这个等式约束构造拉格朗日乘子:ADMM解法
这个等式约束构造拉格朗日乘子:ADMM解法

![]() 相当于
相当于![]() ,m是上面所求的mask矩阵。
,m是上面所求的mask矩阵。
迭代子公式为:
求解得:
![]()
具体的推导在论文的附录部分。
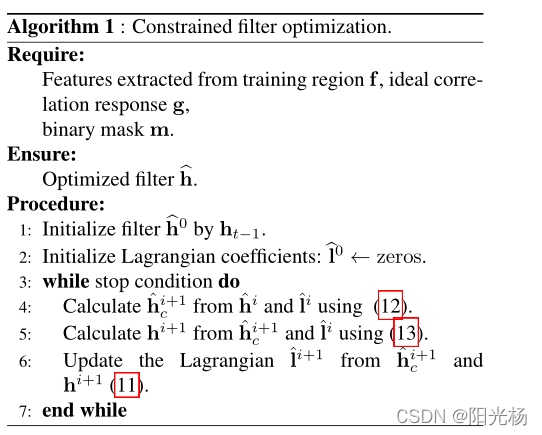
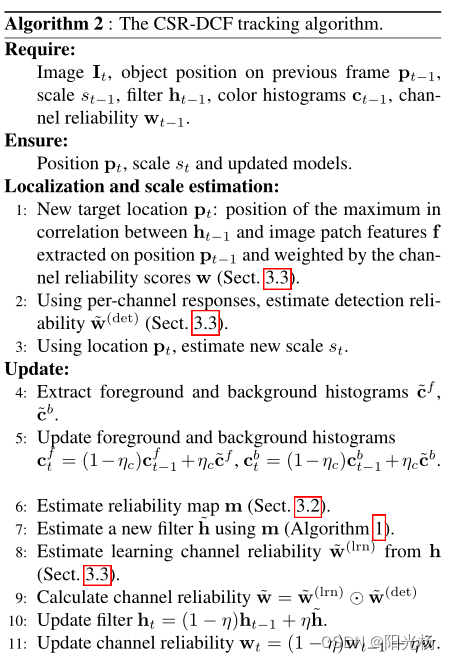
算法流程如下:
求相关响应得分(定位阶段):
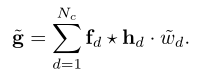
![]() 为上述所求的通道权重矩阵。可以被认为是基于每个特征通道的辨别能力的缩放因子。
为上述所求的通道权重矩阵。可以被认为是基于每个特征通道的辨别能力的缩放因子。
前景和背景直方图c被提取并通过具有学习速率ηc的指数平均衰减来更新。前景直方图由估计的对象边界框内的Epanechnikov核提取,背景从两倍于对象大小的邻域中提取。
特征是从在前一帧中以目标估计位置为中心的搜索区域中提取的,并与学习滤波器![]() 相关联。通过对信道可靠性分数
相关联。通过对信道可靠性分数![]() 加权的相关响应求和来定位目标。每个通道滤波器响应用于计算相应的检测可靠性值
加权的相关响应求和来定位目标。每个通道滤波器响应用于计算相应的检测可靠性值![]()


















 9268
9268

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











