







ROS核心概念
-
节点Node
执行单元 类似于.exe -
节点管理器ROS Master
为节点提供命名与通讯服务,类似婚介所
全局对象字典:记录全局变量的变量值和名称 -
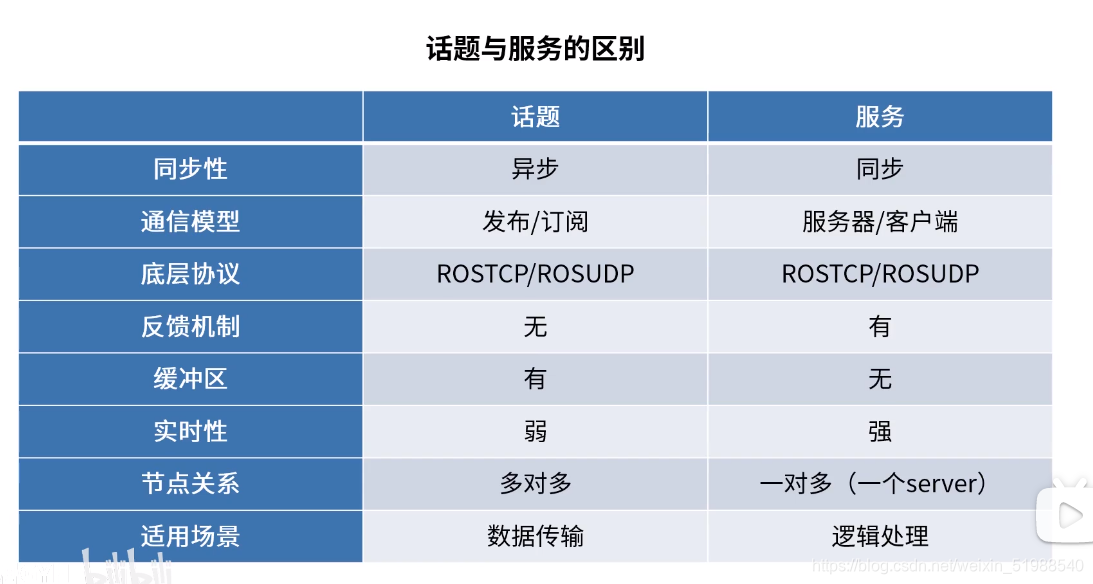
话题Topic
异步通信机制;类似于数据线;数据由发布者传输到订阅者 -
消息Message
具有一定的类型和数据结构,例如图像中的RGB信息
自定义:.msg -
服务Service
使用客户端/服务器模型;客户发送请求数据,服务器完成处理后返
回应答数据 ;是有反馈的数据通讯
自定义:.sry
-
参数Paramaster
全局共享字典;可以通过网络访问
setParam(“foo”,1) 设置foo = 1
getParam(“foo”)
不适合动态参数的;ROS有专门的动态参数配置 -
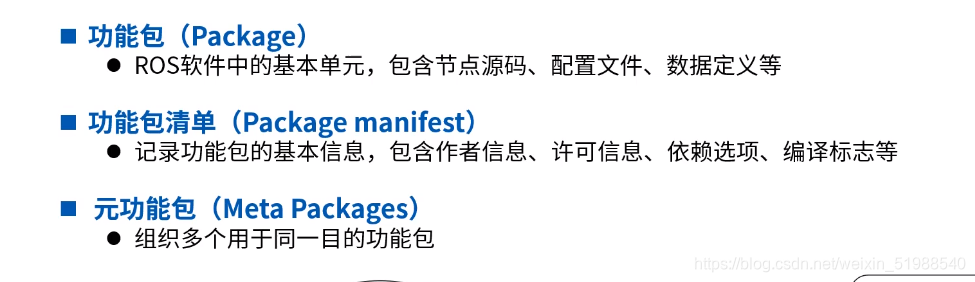
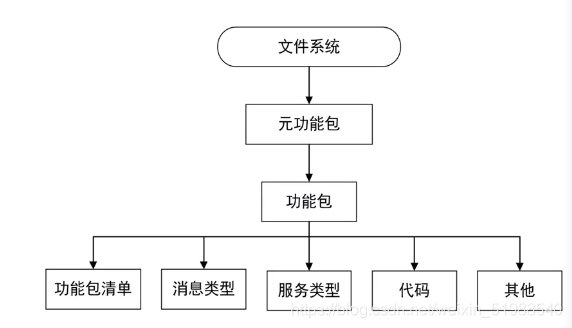
功能包Package
-
元功能包 Meta Packages
-
功能包清单 Package manifest



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











