






汉捷咨询 胡红卫
iDSTE战略管理数字化平台是基于软件包驱动业务变革(PEBT,Package Enable Business Transformation)思想构建的。我们在iDSTE系统中构建了业界最佳的战略管理思想、战略管理模式、DSTE流程与最佳实践,这样就可以通过iDSTE系统实施与运行,驱动或使能DSTE流程高效运行。具体来说,iDSTE系统主要通过十二个步骤的运行,驱动DSTE流程从SP,到BP,到战略执行运营的端到端高效运行,打造“8311战略工程”,即“看8年、谋3年、定1年、干1年,并落实到每1天”,如下图:
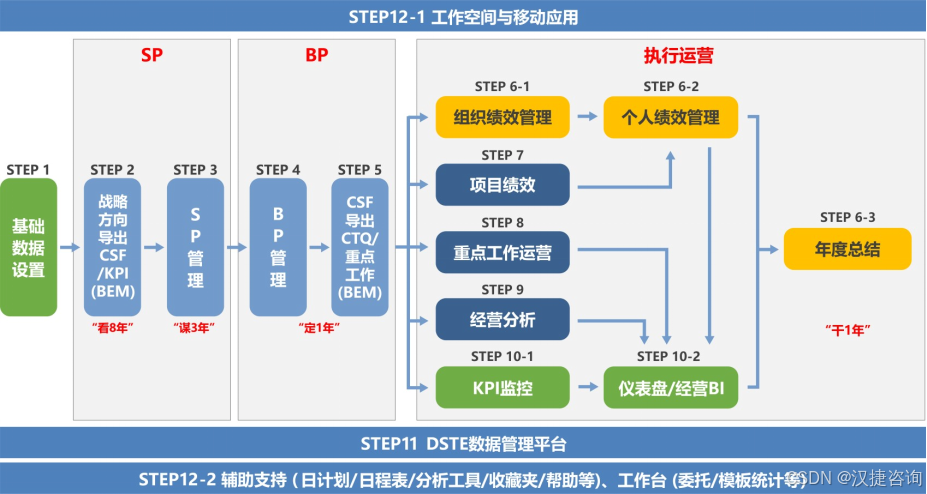
为何首先是“看8年”?因为战略要强调长期主义,即根据战略方向与愿景目标,明确战略路径与战略衡量指标(即中长期的关键成功要素与战略KPI),在一些关键结果领域制定中长期(如8年)的战略目标,并预先进行持续投入和行动。正如亚马逊贝索斯所讲:“一切从长远目标出发!如果你依据7年目标行事,你将很少有竞争对手,否则将有大量竞争对手”。这里的“看8年”只是例如8年,其实可以是10年,7年或5年等,总之战略不仅要有长远的愿景与使命,还需要中长期的战略目标和战略路径。
“谋3年”就是制定未来3年或5年的战略规划(SP),包括:
1.公司级战略规划(CSP):公司战略回顾与双差分析、市场洞察、战略意图、业务组合与战略专题、竞争战略与平台战略、关键战略举措与资源规划及风险评估等。
2.业务单位级战略规划(BUPL-SP):业务单位战略规划与双差分析、市场洞察与市场细分、战略意图、细分市场及产品组合与战略专题、业务设计、目标市场业务策略及计划、关键战略举措与资源规划及风险评估等。
3.职能领域战略规划(FSP):职能领域战略回顾与双差分析、内外环境分析、战略意图、功能建设路径与创新、功能支撑与服务里程碑、关键战略举措与资源规划及风险评估等。
“定1年”就是制定下一年度的年度经营计划(BP),包括:
1.公司年度经营计划(CBP):公司年度机会洞察、年度经营策略与目标、年度KPI目标、年度TOPN重点工作、年度销售计划、年度研发计划、年度品牌与市场推广计划、年度生产计划、年度固定资产投资计划、年度管理策略与管理变革计划、公司组织结构、年度人力计划、年度财务预算、高层个人绩效承诺/合同、年度风险评估等。
2.业务单位年度经营计划(BUPL-BP):业务单位年度机会洞察、年度销售预测与订发货计划、年度经营策略与目标、年度KPI目标、年度TOPN重点工作、年度销售计划、年度新产品开发计划、年度市场行销计划、年度生产计划、年度管理策略与管理变革计划、业务单位组织结构、年度人力计划、年度财务预算、年度风险评估等。
3.职能部门战略规划(FBP):功能部门年度机会洞察、年度经营策略与经营目标(针对具有收入中心或利润中心部门的情况)、年度KPI目标、年度TOPN重点工作、年度销售计划(针对具有销售收入的情况)、年度中研研发计划(针对平台研发部门)、年度销售支持计划(针对营销部门)、年度生产计划与采购计划(针对供应链部门)、年度管理策略与管理变革计划、功能部门组织结构、年度人力计划、年度财务预算、年度风险评估等。
“干1年”就是根据年度经营计划(BP)进行执行,并开展各方面的战略执行运营活动,包括:
1.组织绩效管理与个人绩效管理:组织绩效关注组织KPI目标与承接的年度重点工作的完成情况,个人绩效管理首先制定个人绩效计划与考核表(相当于个人PBC),支持OKR模式,然后按照绩效管理过程运行。
2.项目绩效管理:对企业各类项目进行定义,包括产品开发项目、技术开发项目、市场推广项目、销售项目、管理变革项目、产品交付项目等,衔接各类项目的WBS计划,开展项目绩效管理,并与个人绩效管理紧密结合,推动项目的跨部门运行,提升项目绩效。尤其对于研发项目的考核,可以采用简评与详评两种方式,适配企业研发项目管理的水平。
3.重点工作运营:根据BEM解码,创建各组织层级(一般为公司层级、一级部门层级)的年度TOPN重点工作,并进行立项与重点工作任务分解。从重点工作项目经理、重点工作归属组织两个层面开展运营管理,并把重点工作任务纳入到项目绩效管理中,确保各项重点工作保质保量完成。
4.经营分析:以实现年度/季度经营目标为中心目的,分组织层级、按月度对经营/财务目标、KPI目标完成情况进行统计与回顾,结合季度目标甚至全年目标达成预测,预先开展差距与对策分析,召开月度经营分析会议,经过集体研讨与评审,形成纠偏任务令或行动事项(Action Item)并跟进落实。
5.仪表盘与经营BI:及时统计各组织层级KPI目标完成情况,监控KPI完成情况与趋势,对于明显的偏差进行分析并干预。从不同领域(如财务、销售、产品线、客户群等),按不同维度(包括产品、部门、时间、项目类别等)创建仪表盘或看板,并提供领导经营驾驶舱,帮助企业管理者随时掌握经营状况,支持经营与管理决策。
“落实到每1天”践行“把战略转化为日常行动”与“日日不断,滴水穿石”的理念,提供日程制定、日计划制定与监控等功能。尤其是“日计划”功能应用,支持个人开展日计划制定与自我管理、上级评价,与日程管理功能应用有机结合,而且关联KPI目标、重点工作任务、阶段性重要事项、业务项目任务、线索与商机跟进、行动事项(Action Item)库,使得每日工作事项随时瞄准战略要求的工作任务。笔者认为:战略执行是通过“每一人、每一天、每一事”来实现的,所以真正的战略执行要落实到这“三个一”上,也印证了德鲁克对战略的洞见:战略不是未来做什么,而是现在做什么才有未来!

















10-25
 574
574
574
05-28
314
314
06-02

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









