







PID的基础知识
自己去补吧,这个很简单,相信大家在做这个的时候PID已经很熟了
pid_controller.v模块实现的pid控制器
直接先上代码:
module pid_controller (
input clk,
input rst_n,
input pid_en,
input signed [31:0] desired_value,
input signed [31:0] current_value,
input [31:0] Kp,
input [31:0] Ki,
input [31:0] Kd,
output pid_ack,
output signed [31:0] out
);
// 状态定义
localparam
IDLE = 3'b001, // 空闲状态
CALC_P = 3'b010, // 计算比例项
CALC_I = 3'b011, // 计算积分项
CALC_D = 3'b100, // 计算微分项
REDUCE = 3'b101, // 量化处理
OUTPUT = 3'b110; // 输出结果
// 寄存器声明
reg [2:0] current_state;
reg [2:0] next_state;
reg signed [31:0] error; // 当前误差
reg signed [31:0] last_error; // 上次误差
reg signed [36:0] integral; // 积分项累加值
reg signed [31:0] p_term; // 比例项
reg signed [36:0] i_term; // 积分项
reg signed [31:0] d_term; // 微分项
reg signed [31:0] p_reduced; // 量化后的比例项
reg signed [31:0] i_reduced; // 量化后的积分项
reg signed [31:0] d_reduced; // 量化后的微分项
reg signed [31:0] pid_output; // PID输出
// 状态机主逻辑
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
current_state <= IDLE;
error <= 0;
last_error <= 0;
integral <= 0;
p_term <= 0;
i_term <= 0;
d_term <= 0;
p_reduced <= 0;
i_reduced <= 0;
d_reduced <= 0;
pid_output <= 0;
end else begin
current_state <= next_state;
case (current_state)
IDLE: begin
if (pid_en) begin
error <= desired_value - current_value;
end
end
CALC_P: begin
p_term <= error * Kp;
end
CALC_I: begin
// 抗积分饱和处理
if (!((integral > 2000 && error > 0) ||
(integral < -2000 && error < 0))) begin
integral <= integral + error;
end
i_term <= integral * Ki;
end
CALC_D: begin
d_term <= (error - last_error) * Kd;
last_error <= error;
end
REDUCE: begin
// 右移7+右移9 ≈ 除以102.4
p_reduced <= (p_term >>> 7) + (p_term >>> 9);
i_reduced <= (i_term >>> 7) + (i_term >>> 9);
d_reduced <= (d_term >>> 7) + (d_term >>> 9);
end
OUTPUT: begin
pid_output <= p_reduced + i_reduced + d_reduced;
// 可以在这里添加输出限幅逻辑
end
endcase
end
end
// 状态转移逻辑
always @(*) begin
case (current_state)
IDLE: next_state = pid_en ? CALC_P : IDLE;
CALC_P: next_state = CALC_I;
CALC_I: next_state = CALC_D;
CALC_D: next_state = REDUCE;
REDUCE: next_state = OUTPUT;
OUTPUT: next_state = IDLE;
default: next_state = IDLE;
endcase
end
// 输出赋值
assign out = pid_output;
assign pid_ack = (current_state == OUTPUT);
endmodule
- 需要注意的点,注意按情况改变
error <= desired_value - current_value;的顺序,如果仿真的时候控制器输出out出现不正常的值,那么应该换一下顺序; - 一般是按照流水线计算输出的,因为首先思路清晰,其次,可以避免在一个时钟周期内干很多事情,比如一堆的乘法,如果加入乘法器的ip核,那么可以实现节约资源,每次复用一个乘法单元;
- 注意下面的地方:
这里的意思是把传进来的p_reduced <= (p_term >>> 7) + (p_term >>> 9); i_reduced <= (i_term >>> 7) + (i_term >>> 9); d_reduced <= (d_term >>> 7) + (d_term >>> 9);kp、ki、kd都进行缩小,这个具体原因可以deepseek
测试案例(相信初学的人这里最头疼)
直接上代码:
`timescale 1ns/1ps
module tb_pid_controller;
reg clk;
reg rst_n;
reg pid_en;
wire pid_ack;
reg signed [31:0] desired_value;
reg signed [31:0] current_value;
reg [31:0] Kp;
reg [31:0] Ki;
reg [31:0] Kd;
wire signed [31:0] out;
//假设一个模型,用来和pid控制器形成闭环
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
desired_value <= 0;
current_value <= 0;
end
else if (pid_ack) begin
current_value <= current_value + (out >>> 4);
end
end
//初始化pid模块
pid_controller uut (
.clk(clk),
.rst_n(rst_n),
.pid_en(pid_en),
.desired_value(desired_value),
.current_value(current_value),
.Kp(Kp),
.Ki(Ki),
.Kd(Kd),
.pid_ack(pid_ack),
.out(out)
);
//模拟时钟
initial begin
clk = 0;
forever #10 clk = ~clk;
end
//初始化
initial begin
clk = 1'b0;
rst_n <= 1'b0;
pid_en <= 1'b0;
desired_value <= 0;
current_value <= 0;
Kp <= 32'd100; // Proportional gain
Ki <= 32'd5; // Integral gain
Kd <= 32'd2; // Derivative gain
// Apply reset
#20;
rst_n <= 1'b1;
#20;
desired_value <= 1000;
pid_en <= 1'b1;
end
endmodule
- 注意你为什么有的时候会测试失败(本人也踩了几天的坑),因为你一定要等到pid_controller.v模块计算好了
out之后再更新模型的信息,随便假设一模型测试一下,比如最简单的积分模型current_value <= current_value + (out >>> 4);也就是:
//假设一个模型,用来和pid控制器形成闭环
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
desired_value <= 0;
current_value <= 0;
end
else if (pid_ack) begin//只有当控制器算出来可以用的时候更新
current_value <= current_value + (out >>> 4);
end
end
modelsim测试结果

此时你很皮,想的是,为什么都测试一个不变的值呢,万一目标是sin这种变动的呢,有没有变动的值呢,有的xd,有的xd,哎,我一下是定值1000,稳定后一下改变为sin图像
直接上代码:
`timescale 1ns/1ps
module tb_pid_controller;
reg clk;
reg rst_n;
reg pid_en;
wire pid_ack;
reg signed [31:0] desired_value;
reg signed [31:0] current_value;
reg [31:0] Kp;
reg [31:0] Ki;
reg [31:0] Kd;
wire signed [31:0] out;
//假设一个模型,用来和pid控制器形成闭环
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
desired_value <= 0;
current_value <= 0;
end
else if (pid_ack) begin
current_value <= current_value + (out >>> 4);
end
end
// 正弦波生成变量
real sin_phase = 0;
real sin_step;
reg desired_value_sin_flag; // 标志着期望轨迹从期望值变为期望的sin图像
// 正弦波期望值
initial begin
sin_step = 2 * 3.1415926 / (20000 / 10);
end
always @(posedge clk) begin
if (desired_value_sin_flag) begin
sin_phase <= sin_phase + sin_step;
if (sin_phase >= 2 * 3.1415926) begin
sin_phase <= sin_phase - 2 * 3.1415926;
end
desired_value <= $floor(1000 * $sin(sin_phase));
end
end
//初始化pid模块
pid_controller uut (
.clk(clk),
.rst_n(rst_n),
.pid_en(pid_en),
.desired_value(desired_value),
.current_value(current_value),
.Kp(Kp),
.Ki(Ki),
.Kd(Kd),
.pid_ack(pid_ack),
.out(out)
);
//模拟时钟
initial begin
clk = 0;
forever #10 clk = ~clk;
end
//初始化
initial begin
clk = 1'b0;
rst_n <= 1'b0;
pid_en <= 1'b0;
desired_value <= 0;
current_value <= 0;
desired_value_sin_flag <= 0;
Kp <= 32'd100; // Proportional gain
Ki <= 32'd5; // Integral gain
Kd <= 32'd2; // Derivative gain
// Apply reset
#20;
rst_n <= 1'b1;
#20;
desired_value <= 1000;
pid_en <= 1'b1;
# 20000 //注意这里的话我已经测试了desired_value <= 1000;,是20000ns的时候收敛了,这时候才开始sin的图形
desired_value_sin_flag <= 1;//期望轨迹变为了sin图形
end
endmodule
- 相比于前面的测试案例只增加了:
// 正弦波生成变量
real sin_phase = 0;
real sin_step;
reg desired_value_sin_flag; // 标志着期望轨迹从期望值变为期望的sin图像
// 正弦波期望值
initial begin
sin_step = 2 * 3.1415926 / (20000 / 10);
end
always @(posedge clk) begin
if (desired_value_sin_flag) begin
sin_phase <= sin_phase + sin_step;
if (sin_phase >= 2 * 3.1415926) begin
sin_phase <= sin_phase - 2 * 3.1415926;
end
desired_value <= $floor(1000 * $sin(sin_phase));
end
end
以及用一个标志位desired_value_sin_flag标记期望值发生了变化
# 20000 //注意这里的话我已经测试了desired_value <= 1000;,是20000ns的时候收敛了,这时候才开始sin的图形
desired_value_sin_flag <= 1;//期望轨迹变为了sin图形
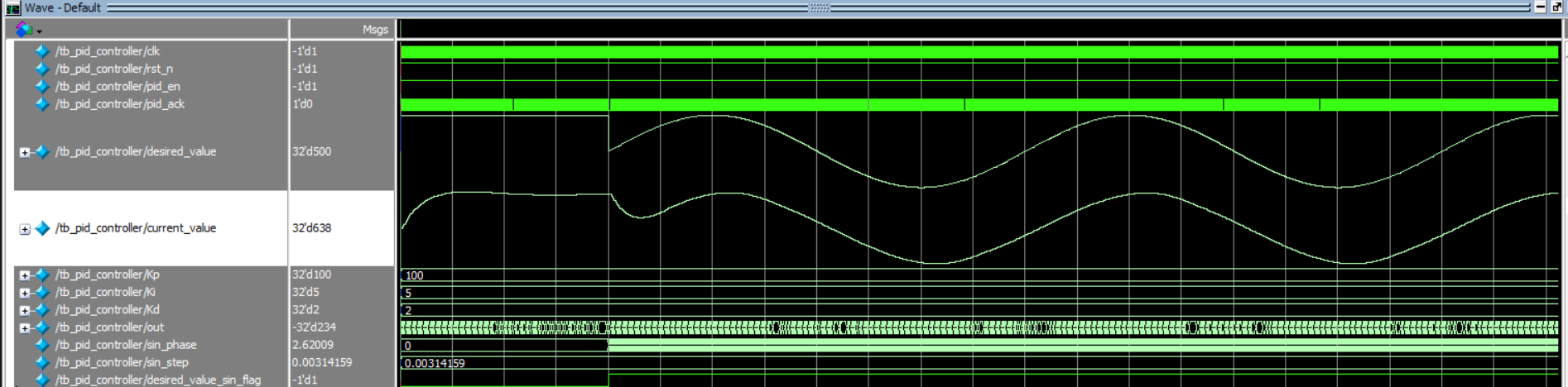
仿真结果

















 5631
5631

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









