






 本文介绍了CAN(Controller Area Network)通信的基础知识,包括CAN的作用、总线电平信号和帧种类。重点讲解了数据帧的构成,如仲裁段、控制段、数据段、CRC段和ACK段,并提供了CubeMX中的CAN配置示例以及发送和接收函数的代码实现,帮助读者理解和应用CAN通信。
本文介绍了CAN(Controller Area Network)通信的基础知识,包括CAN的作用、总线电平信号和帧种类。重点讲解了数据帧的构成,如仲裁段、控制段、数据段、CRC段和ACK段,并提供了CubeMX中的CAN配置示例以及发送和接收函数的代码实现,帮助读者理解和应用CAN通信。
前言
作为一个小萌新,在通过CAN控制6020、3508、2006驱动并实现相关功能后,我决定根据自己的理解介绍一下can通信,不足的地方敬请指正
- can的作用
- can总线的电平信号
- can的帧种类
一、CAN的作用
CAN是控制器局域网络的简称,是ISO国际标准化的串行通信协议。它的英文全称是Controller Area Network,一般简写为CAN。CAN是由以研发和生产汽车电子产品著称的德国BOSCH公司开发的,并最终成为国际标准(ISO 11898),是国际上应用最广泛的现场总线之一
它的特点是:
其为多主机工作模式,可以在一条通信线路上实现多个设备发送信息。各个系统拥有唯一的ID号,在他们同时发送信息时,可以通过自动仲裁机制来使得优先级高的设备优先发送信息,避免了冲突与拥挤。
二、CAN总线的电平信号

can用两条线进行数据传输,一为CAN_H,另一个是CAN_L。
can通过判断这两条数据线的压差来进行仲裁,即
- 当CAN_H=3.5V,CAN_L=1.5V时,即为逻辑一,代表隐性(Recessive)
- 当CAN_H=2.5V,CAN_L=2.5V时,即为逻辑零,代表显性(Dominant)
这就是差分信号。
三、CAN的帧种类
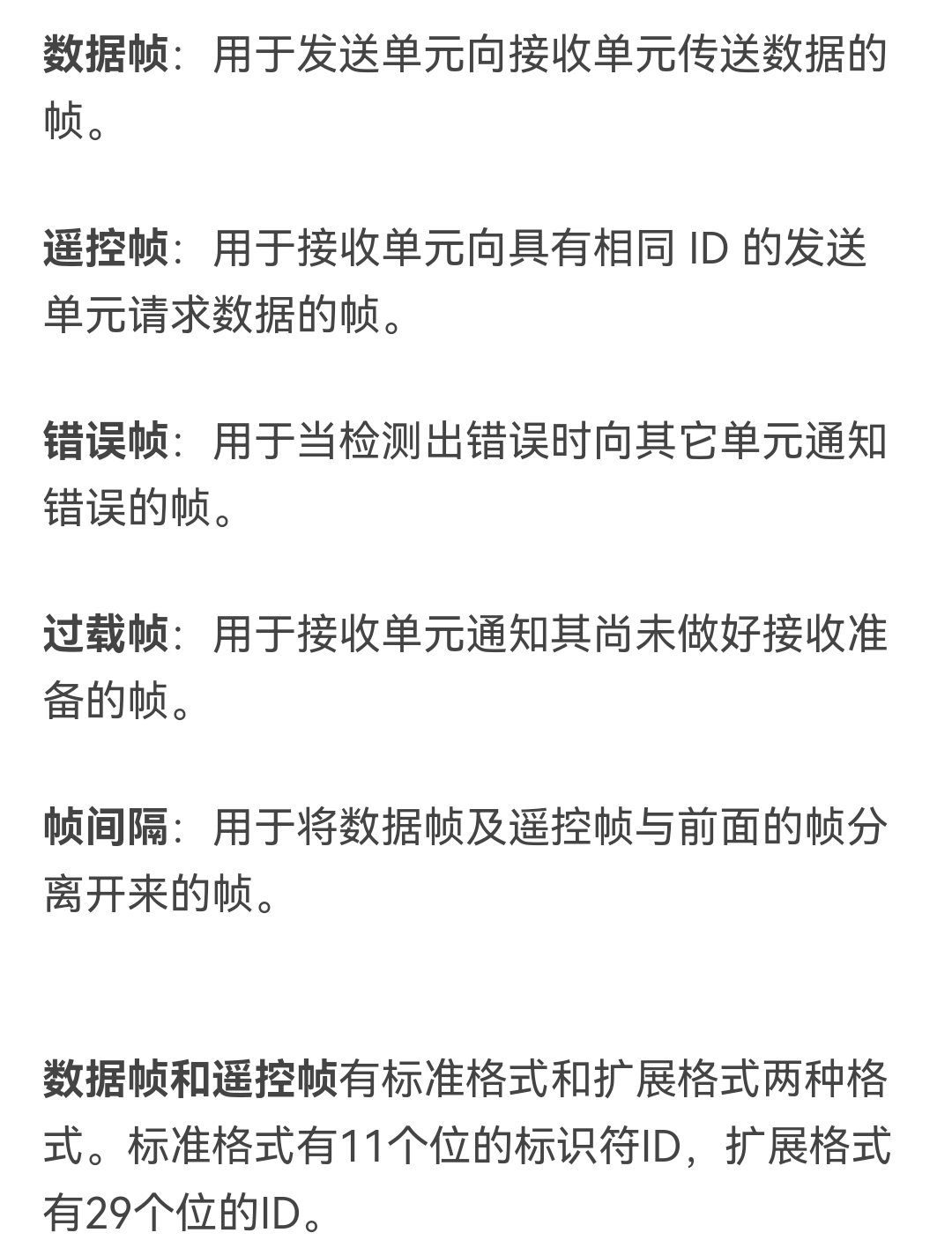
此中,只介绍数据帧
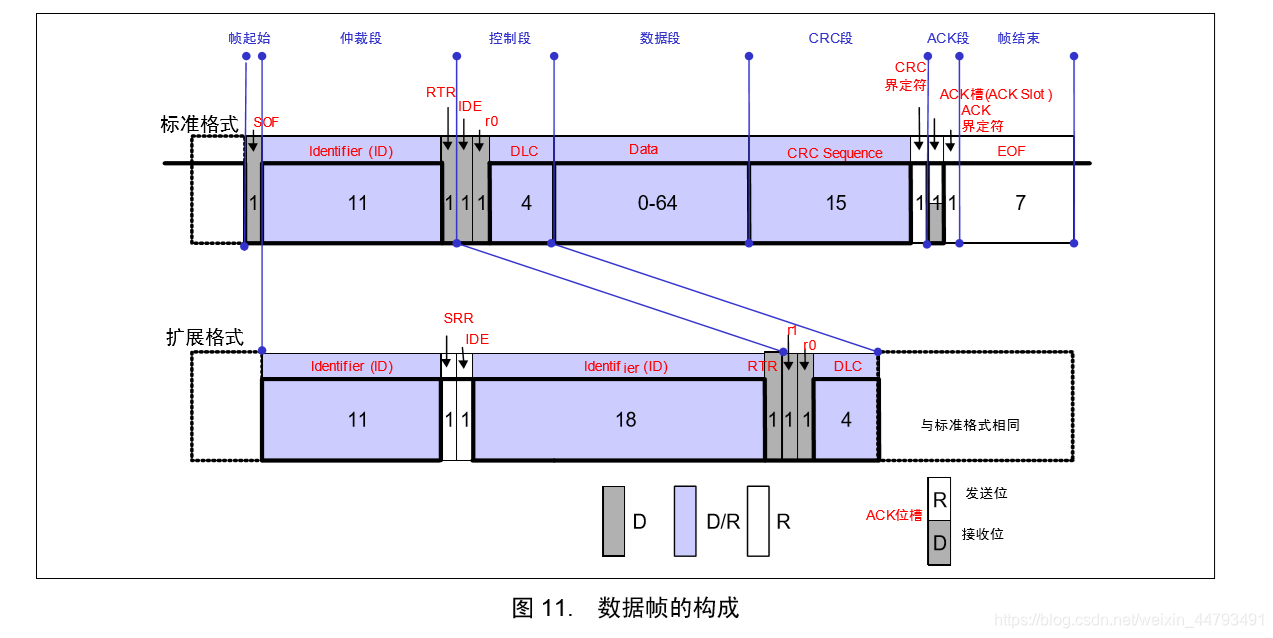
-
仲裁段:包括目标设备的ID号和RTR。
ID号是用来标识接收设备的。其中的标准格式
CAN_ID_STD(0)与扩展格式(!0)取决于ID号的长度。RTR是用来标识其是数据帧
CAN_RTR_DATA(0)还是遥控帧(!0)的 -
控制段:
IDE指的即为刚刚所讲的ID号;
r0是保留位(用途暂时不清楚,但要求设为显性电平);
DLC指的是数据长度。设为
0x08的时候,可以支持多个设备。 -
数据段:
用于存放数据
-
CRC段:
用于检验报文在传输过程中是否出错。这个是由can硬件自动完成的
-
ACK段:
相当于一个标志位,发送方的设置为隐形位,当接收方成功接收了之后,变为显性。
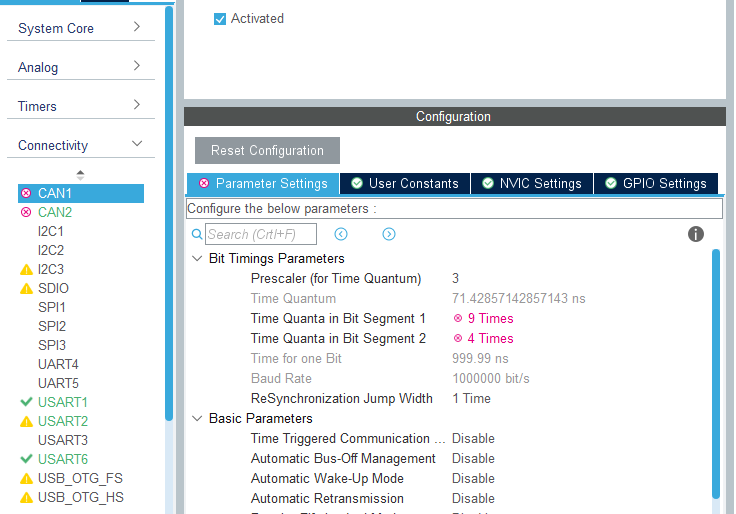
在CubeMX上的相关配置
- can的相关参数配置
-
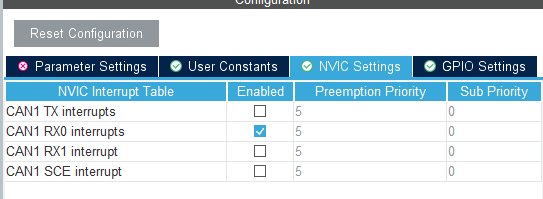
打开中断
-
控制代码
//过滤器配置
void CAN_FilterInit(CAN_HandleTypeDef *hcan)
{
CAN_FilterTypeDef CAN_FilterInitStructure;
CAN_FilterInitStructure.FilterMode=CAN_FILTERMODE_IDMASK;
CAN_FilterInitStructure.FilterScale=CAN_FILTERSCALE_32BIT;
CAN_FilterInitStructure.FilterIdHigh=0x0000;
CAN_FilterInitStructure.FilterIdLow=0x0000;
CAN_FilterInitStructure.FilterMaskIdHigh=0x0000;
CAN_FilterInitStructure.FilterMaskIdLow=0x0000;
CAN_FilterInitStructure.FilterBank=0;
CAN_FilterInitStructure.FilterFIFOAssignment=CAN_RX_FIFO0;
CAN_FilterInitStructure.FilterActivation=ENABLE ;
CAN_FilterInitStructure.SlaveStartFilterBank=14; //因为这里规定要是
if(HAL_CAN_ConfigFilter (hcan,&CAN_FilterInitStructure)!=HAL_OK )
{
Error_Handler () ;
}
if(HAL_CAN_Start(hcan) !=HAL_OK)
{
Error_Handler () ;
}
if(HAL_CAN_ActivateNotification(hcan , CAN_IT_RX_FIFO0_MSG_PENDING)!=HAL_OK )
{
Error_Handler () ;
}
}
//接收函数
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
CAN_RxHeaderTypeDef rx_header;
rx_header .IDE =CAN_ID_STD ; //使用标准id
rx_header .RTR =CAN_RTR_DATA ;//使用数据帧
rx_header .DLC=0x08;
HAL_CAN_GetRxMessage (&hcan1 ,CAN_RX_FIFO0 ,&rx_header,rx_data);
//这里写你的数据解包函数
}
//发送函数
void CAN_Send_Msg(CAN_HandleTypeDef *hcan,uint32_t ID,short int i1,short int i2,short int i3,short int i4)
{
static CAN_TxHeaderTypeDef tx_header;
// uint32_t Tx_mail;
tx_header .StdId =ID; //标识符
tx_header .IDE =CAN_ID_STD ; //使用标准id
tx_header .RTR =CAN_RTR_DATA ;//使用数据帧
tx_header .DLC=8;
tx_data [0] = i1 >>8;
tx_data [1] = i1;
tx_data [2] = i2 >>8;
tx_data [3] = i2;
tx_data [4] = i3 >>8;
tx_data [5] = i3;
tx_data [6] = i4 >>8;
tx_data [7] = i4;
HAL_CAN_AddTxMessage(&hcan1,&tx_header,tx_data,(uint32_t *)CAN_TX_MAILBOX0);
}


















 2288
2288

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











