






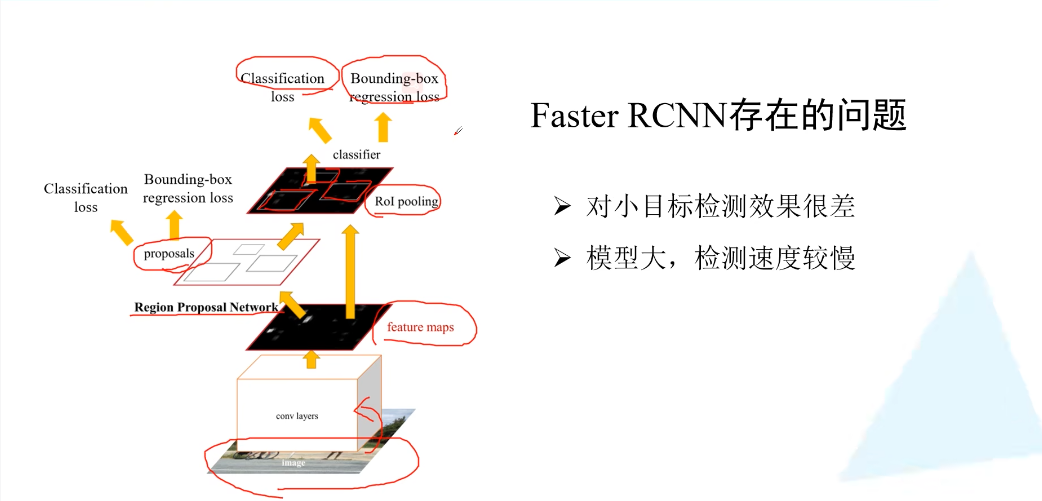
Faster RCNN对小目标检测效果差的原因:
它只是在一个特征层上进行预测的,而这个特征层是经过很多卷积层之后得到的feature maps,它已经被抽象到一个比较高的层次了。而抽象的层次越高的话,它的一些细节的保留就越少,而检测小目标通常就需要这些细节信息。所以,直接在一个高层的特征层上预测小目标检测效果就没有那么好。
Faster RCNN检测速度慢的原因:
因为在预测过程中分成两步走,首先在RPN部分进行了一次预测,在Fast RCNN部分又进行了一次预测(Two-Stage网络的通病)
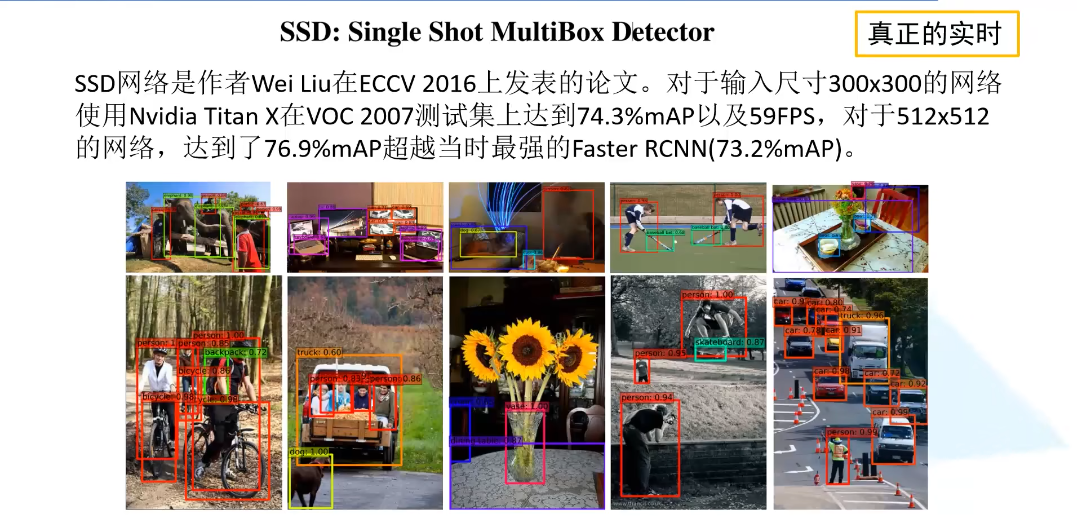
SSD网络模型框架
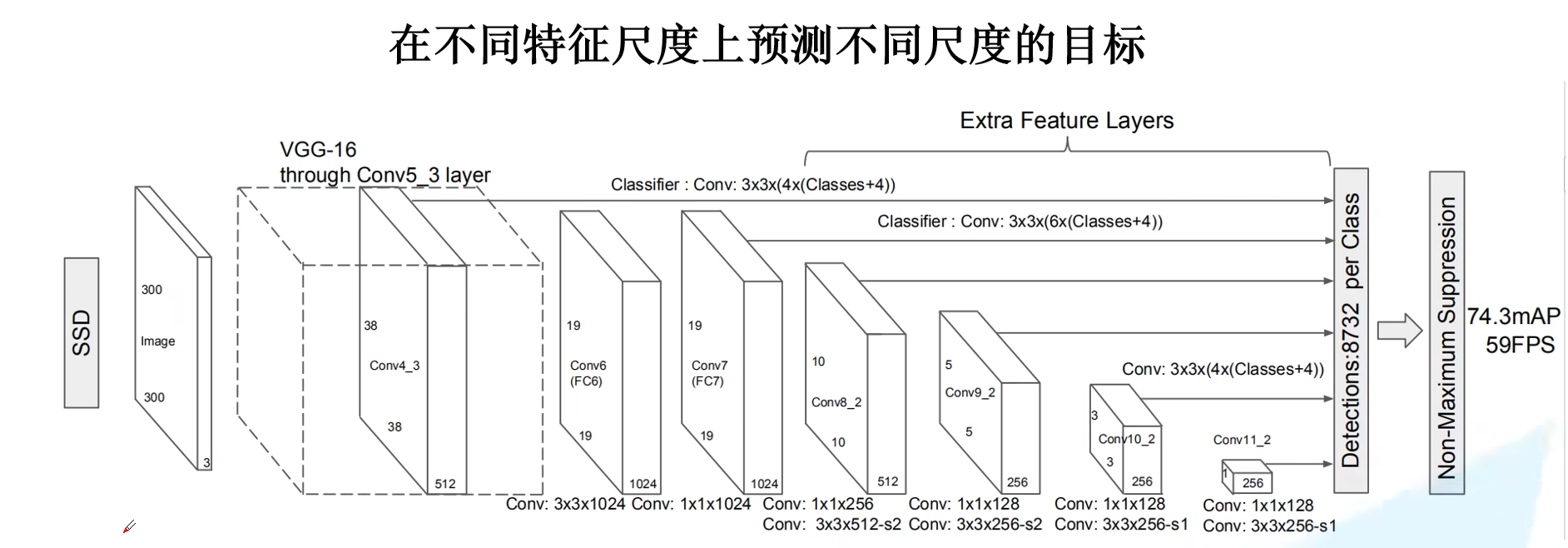
1.输入图像必须是300×300(缩放)的RGB图像
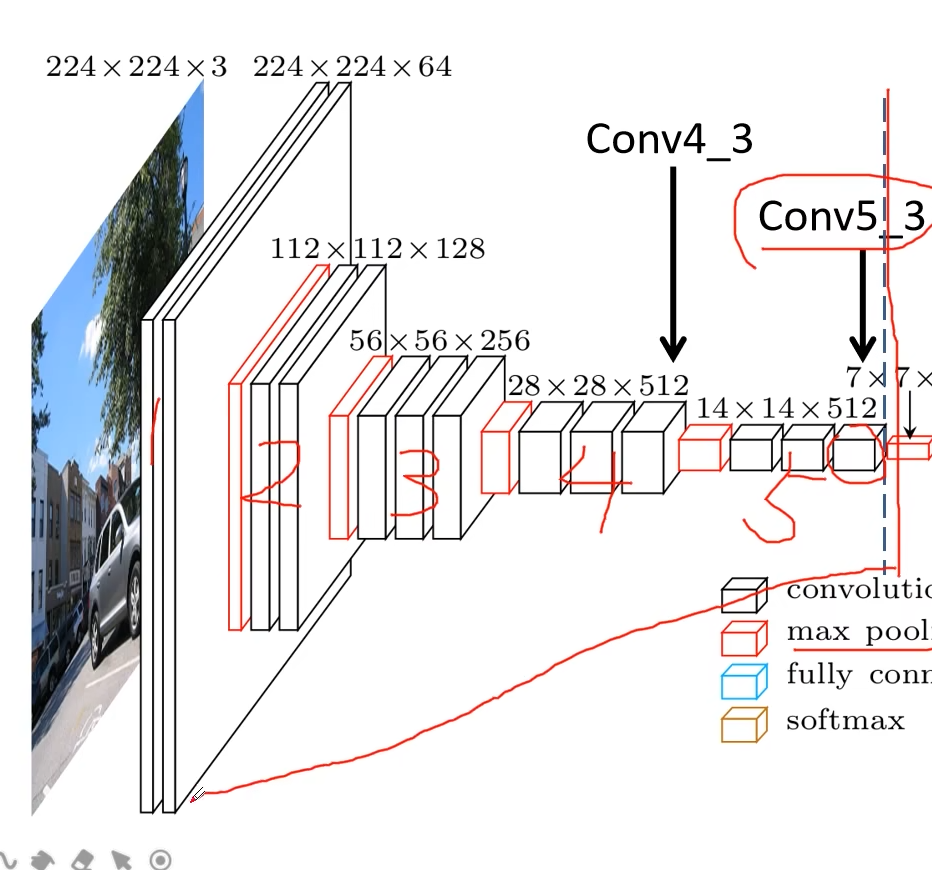
2.Conv5_3 layer
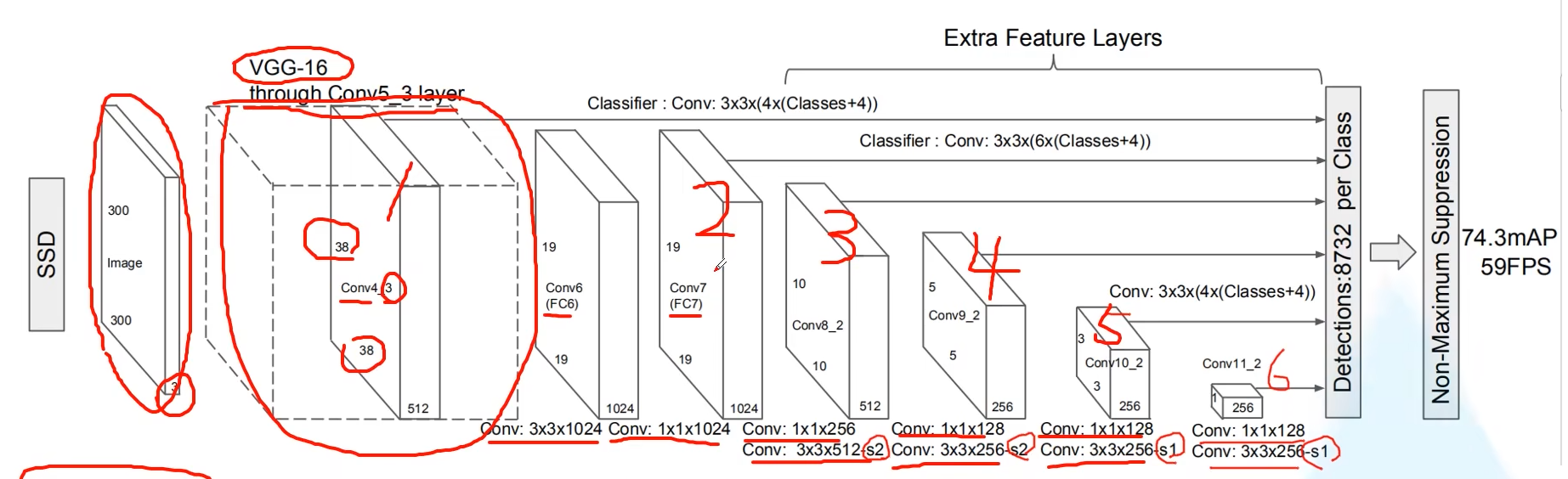
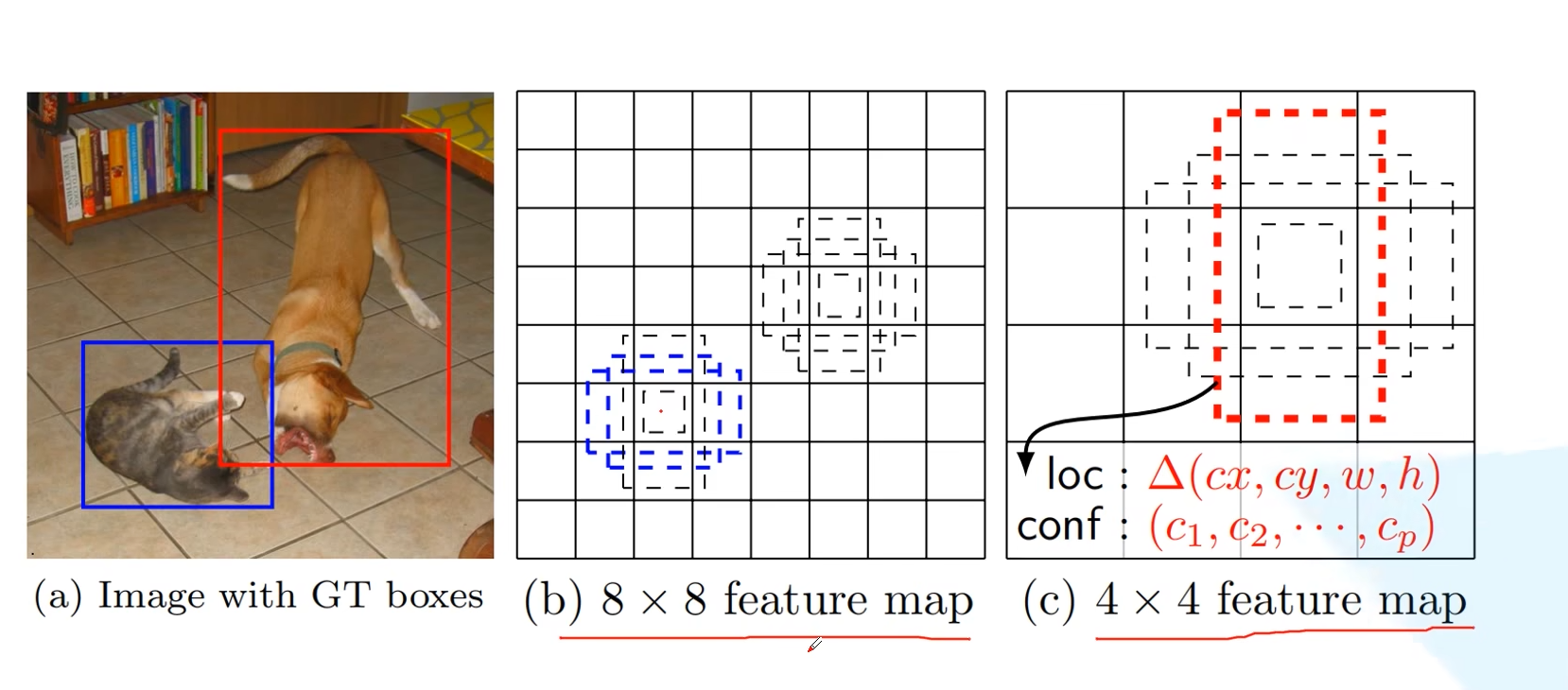
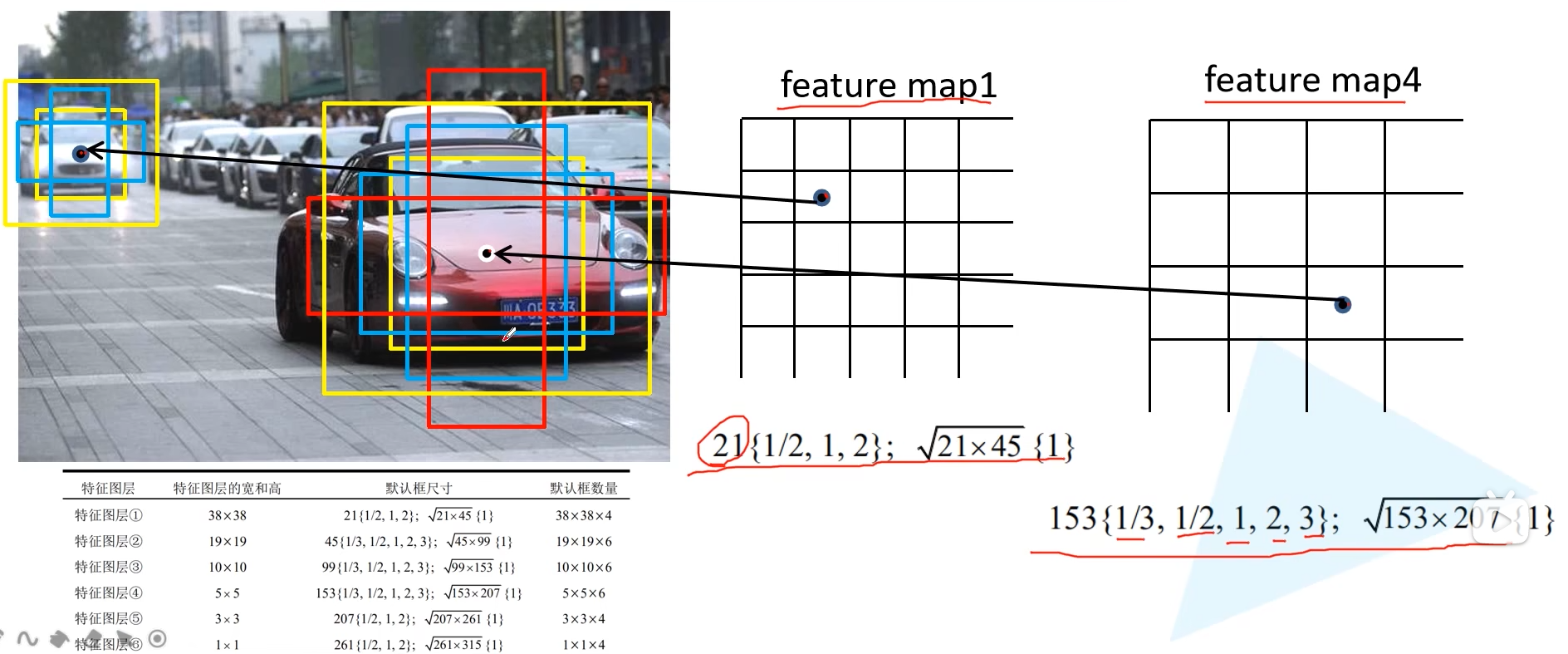
这样得到了6个预测特征层,分别去预测不同大小的目标。(小-->大)
Default Box 的 scale尺度以及 aspect比例设定
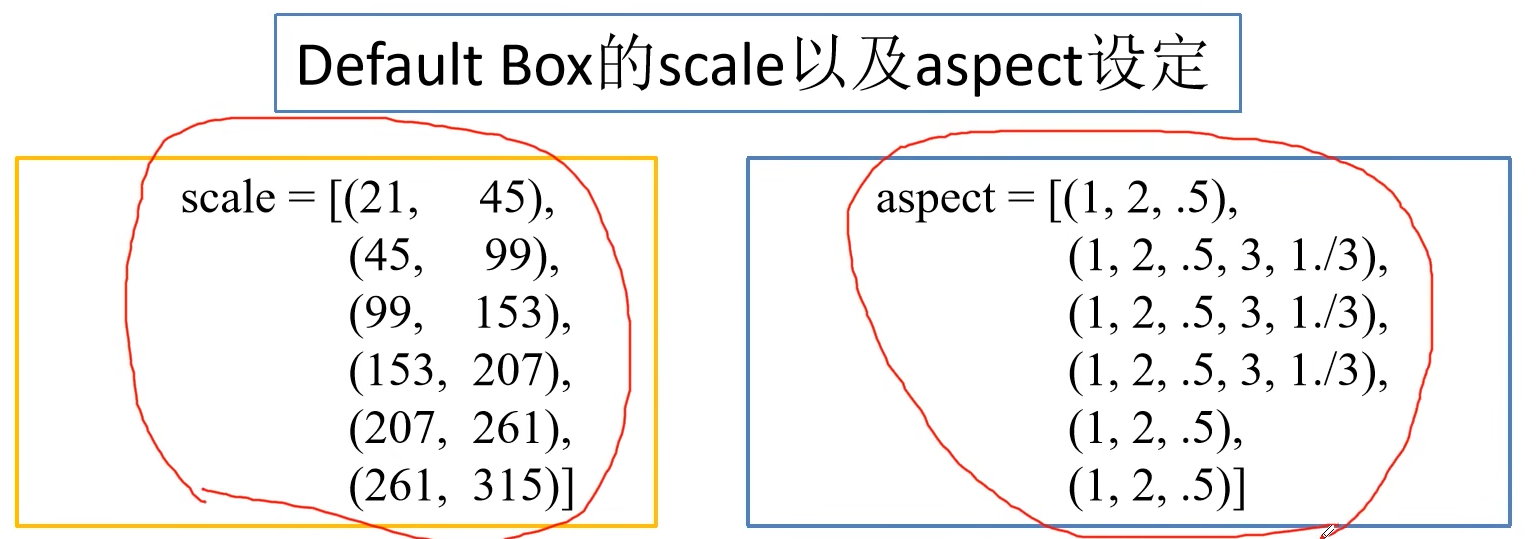

Sk就是scale的第一个元素,Sk+1是第二个元素

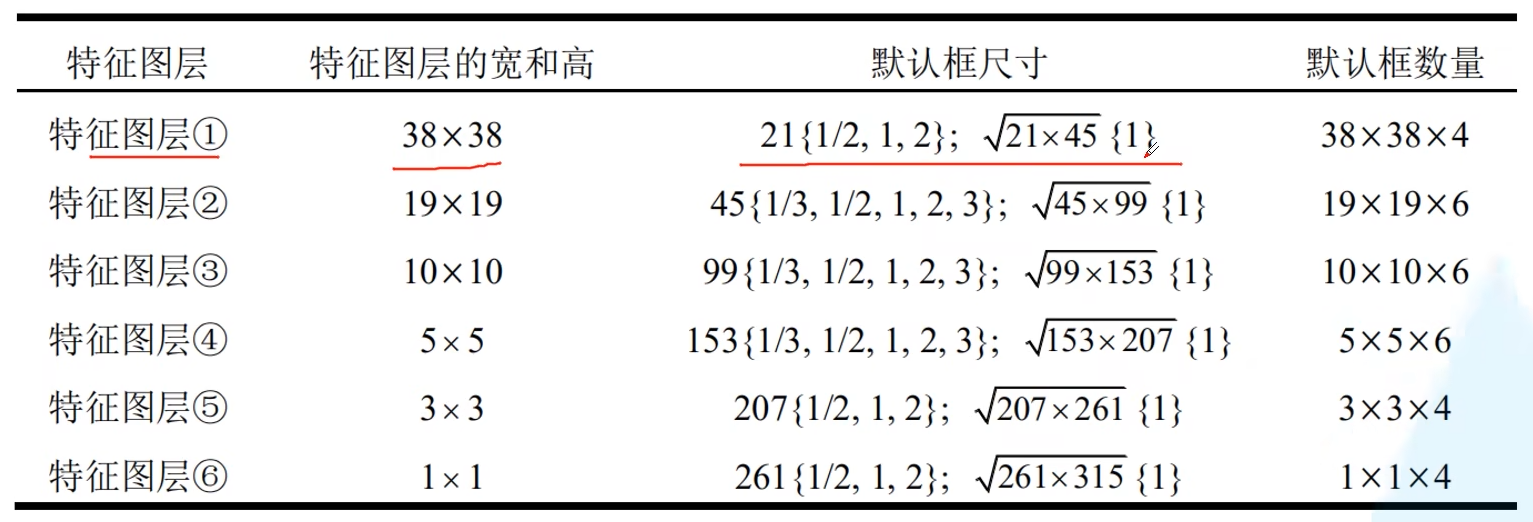
总共生成8732个default box
预测器的实现


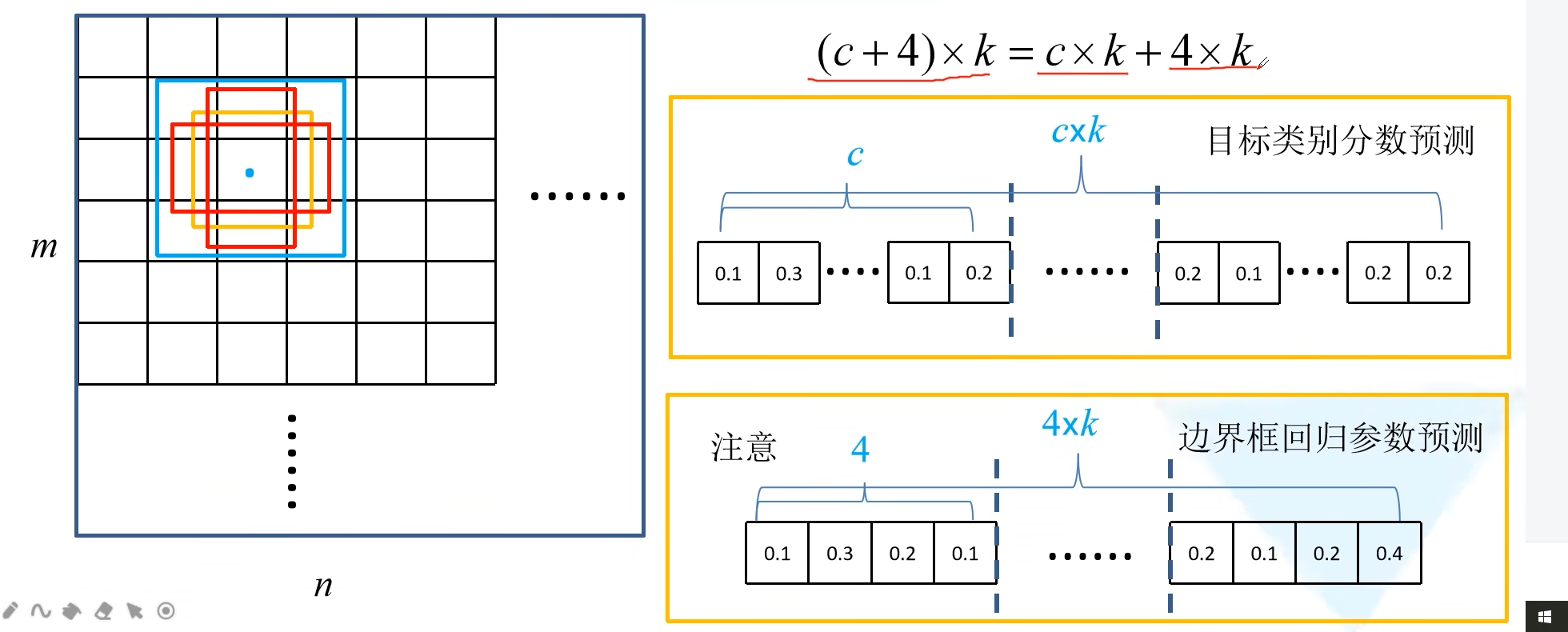
回归参数预测中:
分别表示x,y,w,h的偏移量
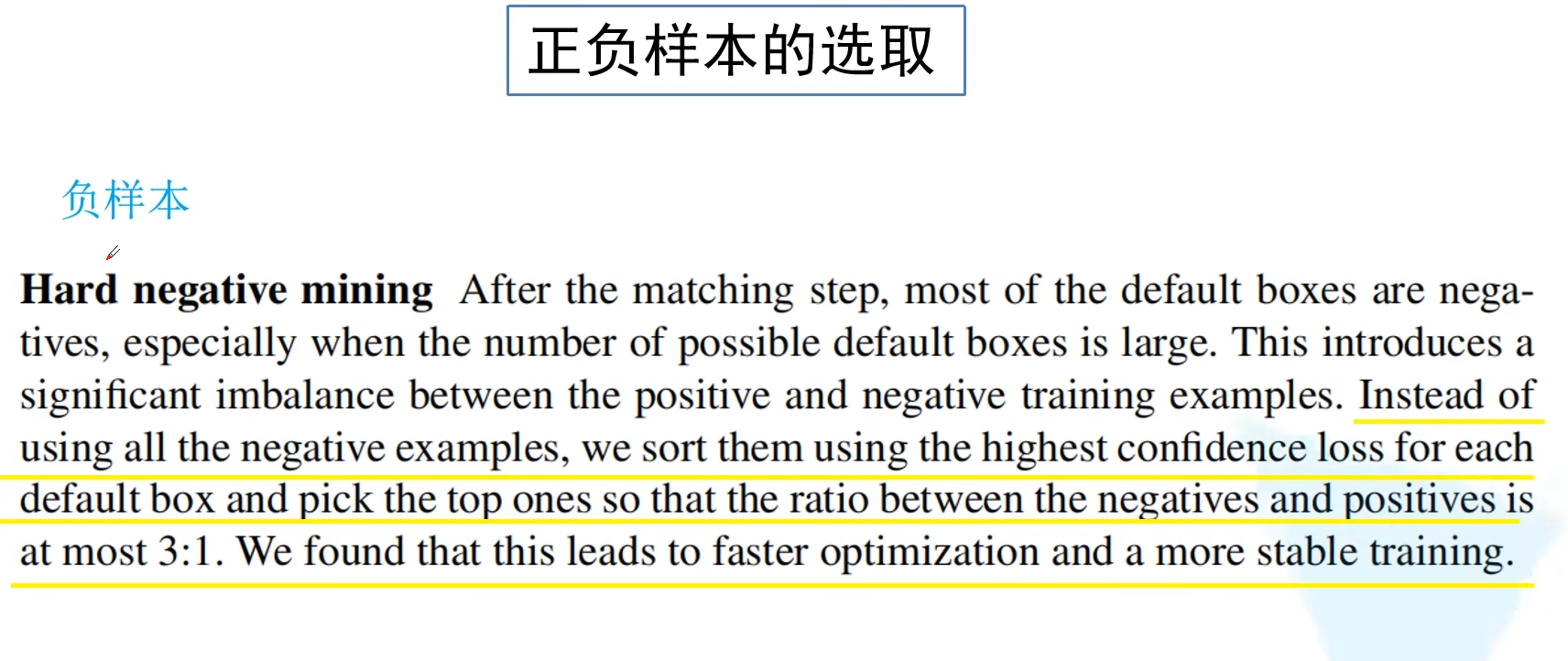
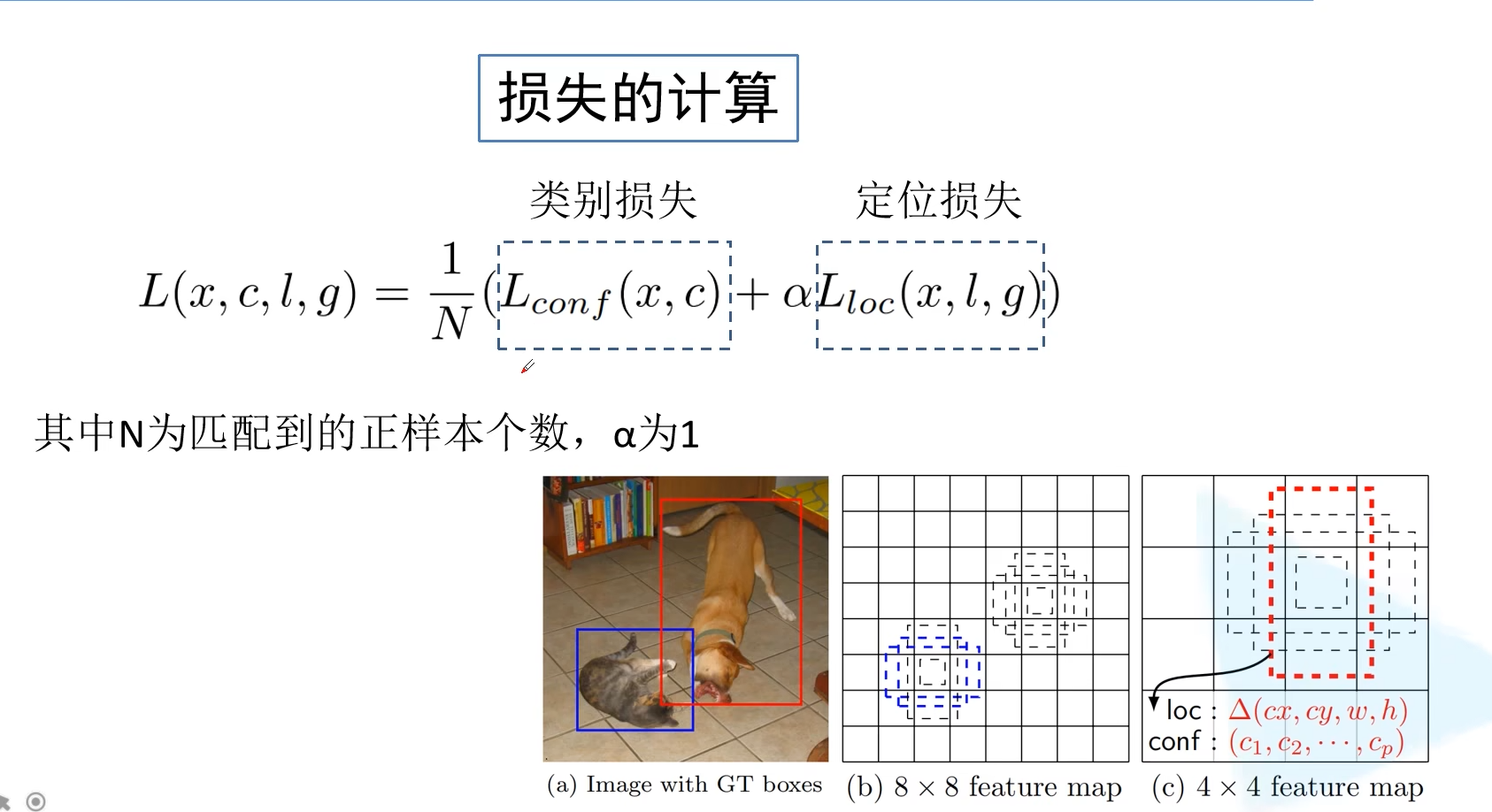
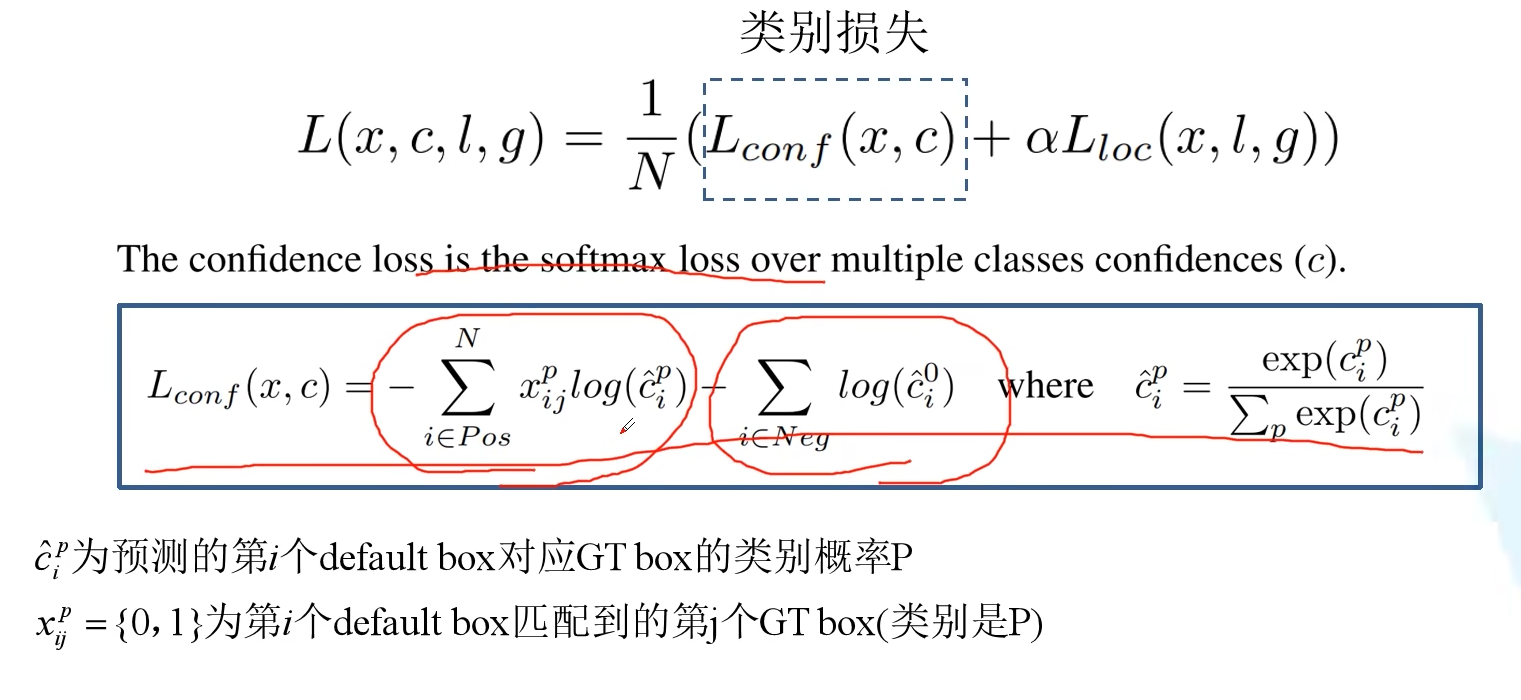
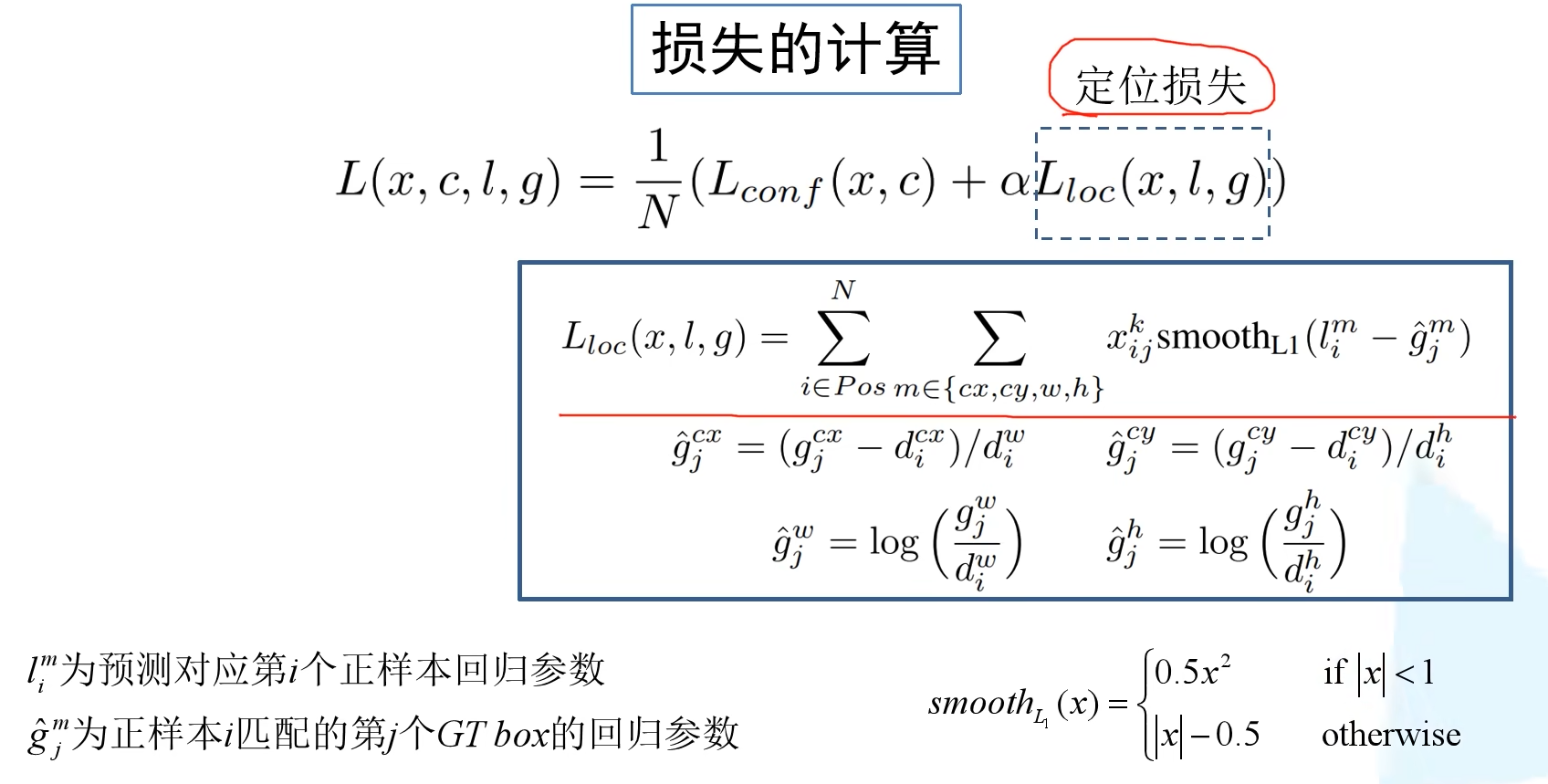
损失的计算
res50_ssd.png

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









