







一、文本介绍
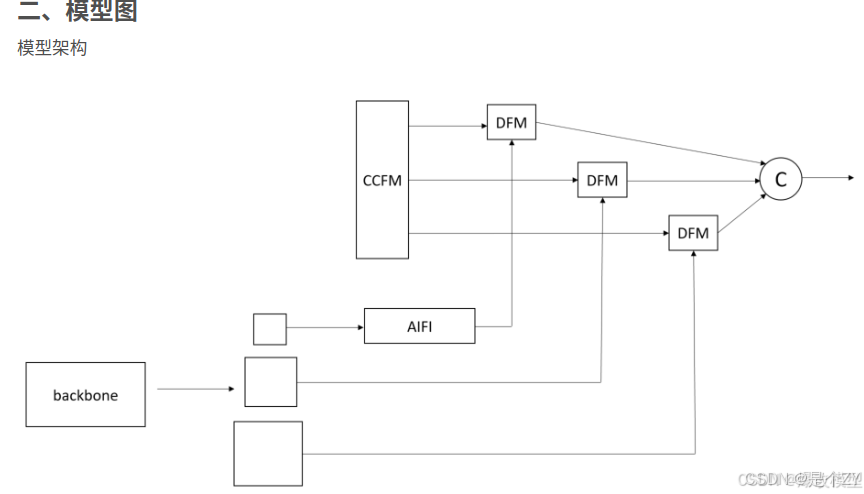
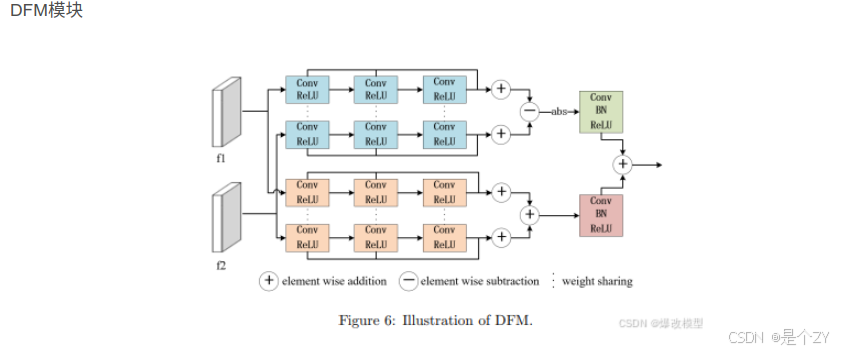
本文修改的模型是RT-DETR,在原本的RT-DETR中,CCFM模块输出的多尺度特征图作为 IoU-aware Query Selection的输入。本文将骨干网络及AIFI模块输出的特征图与CCFM模块输出的特征图使用DFM模块进行特征融合。DFM是一种基于密集连接的简单而有效的特征融合模块,可以减少特征不对齐,并计算出更准确的变化特征。
参考DFM代码:https://github.com/chenpan0615/FCCDN_pytorch
DFM论文:https://arxiv.org/pdf/2105.10860
二、模型图
模型架构
DFM模块
三、核心代码
代码目录结构
dfm.py定义了DFM模块,batchnorm.py主要是对BN层的定义。batchnorm.py和comm.py可以直接从开源代码中拷贝。
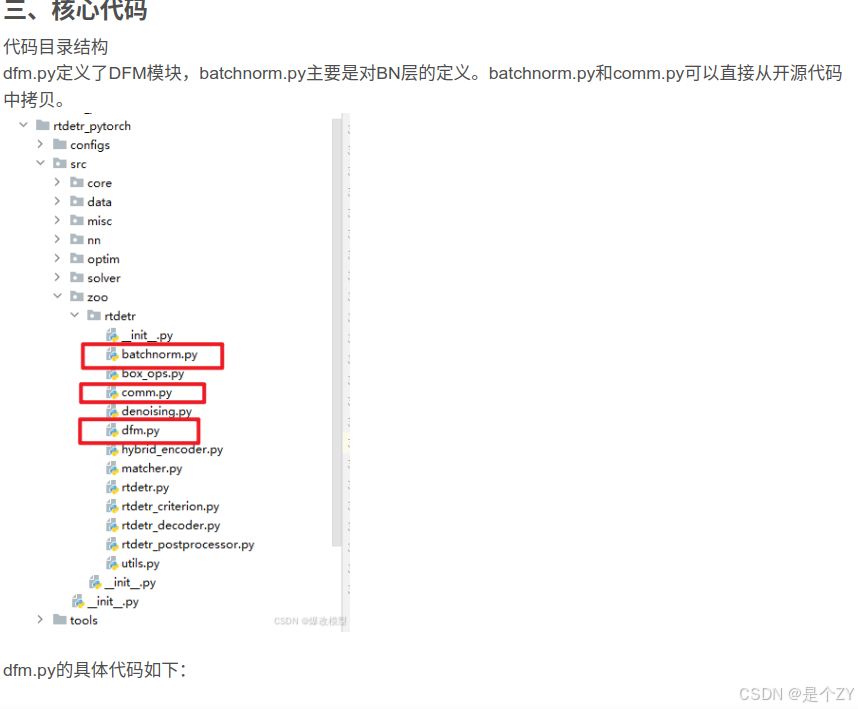
dfm.py的具体代码如下:
import torch
import torch.nn as nn
from .batchnorm import SynchronizedBatchNorm2d
bn_mom = 0.0003
“”“Implemention of dense fusion module”""
class densecat_cat_add(nn.Module):
def init(self, in_chn, out_chn):
super(densecat_cat_add, self).init()
self.conv1 = torch.nn.Sequential(
torch.nn.Conv2d(in_chn, in_chn, kernel_size=3, padding=1),
torch.nn.ReLU(inplace=True),
)
self.conv2 = torch.nn.Sequential(
torch.nn.Conv2d(in_chn, in_chn, kernel_size=3, padding=1),
torch.nn.ReLU(inplace=True),
)
self.conv3 = torch.nn.Sequential(
torch.nn.Conv2d(in_chn, in_chn, kernel_size=3, padding=1),
torch.nn.ReLU(inplace=True),
)
self.conv_out = torch.nn.Sequential(
torch.nn.Conv2d(in_chn, out_chn, kernel_size=1, padding=0),
SynchronizedBatchNorm2d(out_chn, momentum=bn_mom),
torch.nn.ReLU(inplace=True),
)
def forward(self, x, y):
x1 = self.conv1(x)
x2 = self.conv2(x1)
x3 = self.conv3(x2+x1)
y1 = self.conv1(y)
y2 = self.conv2(y1)
y3 = self.conv3(y2+y1)
return self.conv_out(x1 + x2 + x3 + y1 + y2 + y3)
class densecat_cat_diff(nn.Module):
def init(self, in_chn, out_chn):
super(densecat_cat_diff, self).init()
self.conv1 = torch.nn.Sequential(
torch.nn.Conv2d(in_chn, in_chn, kernel_size=3, padding=1),
torch.nn.ReLU(inplace=True),
)
self.conv2 = torch.nn.Sequential(
torch.nn.Conv2d(in_chn, in_chn, kernel_size=3, padding=1),
torch.nn.ReLU(inplace=True),
)
self.conv3 = torch.nn.Sequential(
torch.nn.Conv2d(in_chn, in_chn, kernel_size=3, padding=1),
torch.nn.ReLU(inplace=True),
)
self.conv_out = torch.nn.Sequential(
torch.nn.Conv2d(in_chn, out_chn, kernel_size=1, padding=0),
SynchronizedBatchNorm2d(out_chn, momentum=bn_mom),
torch.nn.ReLU(inplace=True),
)
def forward(self, x, y):
x1 = self.conv1(x)
x2 = self.conv2(x1)
x3 = self.conv3(x2+x1)
y1 = self.conv1(y)
y2 = self.conv2(y1)
y3 = self.conv3(y2+y1)
out = self.conv_out(torch.abs(x1 + x2 + x3 - y1 - y2 - y3))
return out
class DF_Module(nn.Module):
def init(self, dim_in, dim_out, reduction=True):
super(DF_Module, self).init()
if reduction:
self.reduction = torch.nn.Sequential(
torch.nn.Conv2d(dim_in, dim_in//2, kernel_size=1, padding=0),
SynchronizedBatchNorm2d(dim_in//2, momentum=bn_mom),
torch.nn.ReLU(inplace=True),
)
dim_in = dim_in//2
else:
self.reduction = None
self.cat1 = densecat_cat_add(dim_in, dim_out)
self.cat2 = densecat_cat_diff(dim_in, dim_out)
self.conv1 = nn.Sequential(
nn.Conv2d(dim_out, dim_out, kernel_size=3, stride=1, padding=1),
SynchronizedBatchNorm2d(dim_out, momentum=bn_mom),
nn.ReLU(inplace=True),
)
def forward(self, x1, x2):
if self.reduction is not None:
x1 = self.reduction(x1)
x2 = self.reduction(x2)
x_add = self.cat1(x1, x2)
x_diff = self.cat2(x1, x2)
y = self.conv1(x_diff) + x_add
return y
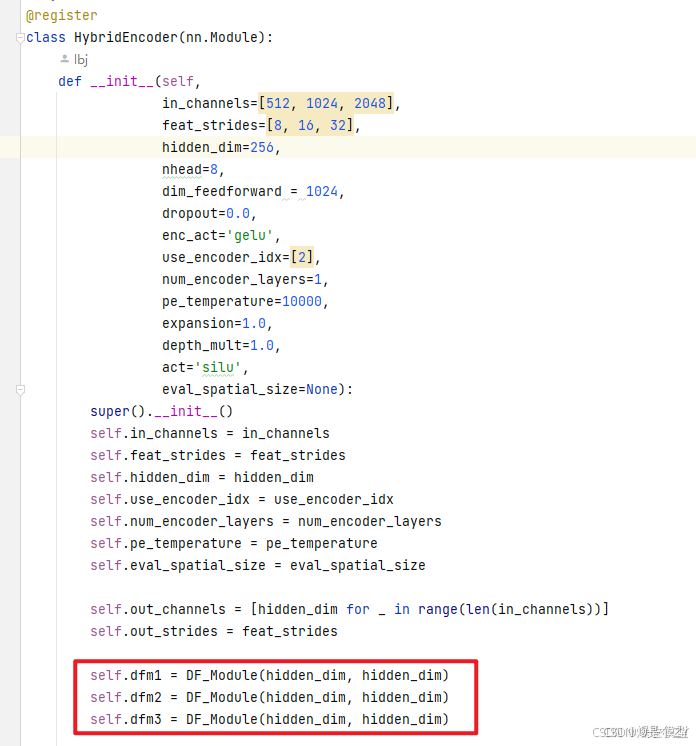
修改hybrid_encoder.py文件
在HybridEncoder类中定义DFM模块
在forward将CCFM输入的特征图与CCFM输出的特征图使用DFM模块进行特征融合
hybrid_encoder.py的具体代码如下:
‘’‘by lyuwenyu
‘’’
import copy
import torch
import torch.nn as nn
import torch.nn.functional as F
from .utils import get_activation
from src.core import register
from .dfm import DF_Module
all = [‘HybridEncoder’]
class ConvNormLayer(nn.Module):
def init(self, ch_in, ch_out, kernel_size, stride, padding=None, bias=False, act=None):
super().init()
self.conv = nn.Conv2d(
ch_in,
ch_out,
kernel_size,
stride,
padding=(kernel_size-1)//2 if padding is None else padding,
bias=bias)
self.norm = nn.BatchNorm2d(ch_out)
self.act = nn.Identity() if act is None else get_activation(act)
def forward(self, x):
return self.act(self.norm(self.conv(x)))
class RepVggBlock(nn.Module):
def init(self, ch_in, ch_out, act=‘relu’):
super().init()
self.ch_in = ch_in
self.ch_out = ch_out
self.conv1 = ConvNormLayer(ch_in, ch_out, 3, 1, padding=1, act=None)
self.conv2 = ConvNormLayer(ch_in, ch_out, 1, 1, padding=0, act=None)
self.act = nn.Identity() if act is None else get_activation(act)
def forward(self, x):
if hasattr(self, 'conv'):
y = self.conv(x)
else:
y = self.conv1(x) + self.conv2(x)
return self.act(y)
def convert_to_deploy(self):
if not hasattr(self, 'conv'):
self.conv = nn.Conv2d(self.ch_in, self.ch_out, 3, 1, padding=1)
kernel, bias = self.get_equivalent_kernel_bias()
self.conv.weight.data = kernel
self.conv.bias.data = bias
# self.__delattr__('conv1')
# self.__delattr__('conv2')
def get_equivalent_kernel_bias(self):
kernel3x3, bias3x3 = self._fuse_bn_tensor(self.conv1)
kernel1x1, bias1x1 = self._fuse_bn_tensor(self.conv2)
return kernel3x3 + self._pad_1x1_to_3x3_tensor(kernel1x1), bias3x3 + bias1x1
def _pad_1x1_to_3x3_tensor(self, kernel1x1):
if kernel1x1 is None:
return 0
else:
return F.pad(kernel1x1, [1, 1, 1, 1])
def _fuse_bn_tensor(self, branch: ConvNormLayer):
if branch is None:
return 0, 0
kernel = branch.conv.weight
running_mean = branch.norm.running_mean
running_var = branch.norm.running_var
gamma = branch.norm.weight
beta = branch.norm.bias
eps = branch.norm.eps
std = (running_var + eps).sqrt()
t = (gamma / std).reshape(-1, 1, 1, 1)
return kernel * t, beta - running_mean * gamma / std
class CSPRepLayer(nn.Module):
def init(self,
in_channels,
out_channels,
num_blocks=3,
expansion=1.0,
bias=None,
act=“silu”):
super(CSPRepLayer, self).init()
hidden_channels = int(out_channels * expansion)
self.conv1 = ConvNormLayer(in_channels, hidden_channels, 1, 1, bias=bias, act=act)
self.conv2 = ConvNormLayer(in_channels, hidden_channels, 1, 1, bias=bias, act=act)
self.bottlenecks = nn.Sequential(*[
RepVggBlock(hidden_channels, hidden_channels, act=act) for _ in range(num_blocks)
])
if hidden_channels != out_channels:
self.conv3 = ConvNormLayer(hidden_channels, out_channels, 1, 1, bias=bias, act=act)
else:
self.conv3 = nn.Identity()
def forward(self, x):
x_1 = self.conv1(x)
x_1 = self.bottlenecks(x_1)
x_2 = self.conv2(x)
return self.conv3(x_1 + x_2)
transformer
class TransformerEncoderLayer(nn.Module):
def init(self,
d_model,
nhead,
dim_feedforward=2048,
dropout=0.1,
activation=“relu”,
normalize_before=False):
super().init()
self.normalize_before = normalize_before
self.self_attn = nn.MultiheadAttention(d_model, nhead, dropout, batch_first=True)
self.linear1 = nn.Linear(d_model, dim_feedforward)
self.dropout = nn.Dropout(dropout)
self.linear2 = nn.Linear(dim_feedforward, d_model)
self.norm1 = nn.LayerNorm(d_model)
self.norm2 = nn.LayerNorm(d_model)
self.dropout1 = nn.Dropout(dropout)
self.dropout2 = nn.Dropout(dropout)
self.activation = get_activation(activation)
@staticmethod
def with_pos_embed(tensor, pos_embed):
return tensor if pos_embed is None else tensor + pos_embed
def forward(self, src, src_mask=None, pos_embed=None) -> torch.Tensor:
residual = src
if self.normalize_before:
src = self.norm1(src)
q = k = self.with_pos_embed(src, pos_embed)
src, _ = self.self_attn(q, k, value=src, attn_mask=src_mask)
src = residual + self.dropout1(src)
if not self.normalize_before:
src = self.norm1(src)
residual = src
if self.normalize_before:
src = self.norm2(src)
src = self.linear2(self.dropout(self.activation(self.linear1(src))))
src = residual + self.dropout2(src)
if not self.normalize_before:
src = self.norm2(src)
return src
class TransformerEncoder(nn.Module):
def init(self, encoder_layer, num_layers, norm=None):
super(TransformerEncoder, self).init()
self.layers = nn.ModuleList([copy.deepcopy(encoder_layer) for _ in range(num_layers)])
self.num_layers = num_layers
self.norm = norm
def forward(self, src, src_mask=None, pos_embed=None) -> torch.Tensor:
output = src
for layer in self.layers:
output = layer(output, src_mask=src_mask, pos_embed=pos_embed)
if self.norm is not None:
output = self.norm(output)
return output
@register
class HybridEncoder(nn.Module):
def init(self,
in_channels=[512, 1024, 2048],
feat_strides=[8, 16, 32],
hidden_dim=256,
nhead=8,
dim_feedforward = 1024,
dropout=0.0,
enc_act=‘gelu’,
use_encoder_idx=[2],
num_encoder_layers=1,
pe_temperature=10000,
expansion=1.0,
depth_mult=1.0,
act=‘silu’,
eval_spatial_size=None):
super().init()
self.in_channels = in_channels
self.feat_strides = feat_strides
self.hidden_dim = hidden_dim
self.use_encoder_idx = use_encoder_idx
self.num_encoder_layers = num_encoder_layers
self.pe_temperature = pe_temperature
self.eval_spatial_size = eval_spatial_size
self.out_channels = [hidden_dim for _ in range(len(in_channels))]
self.out_strides = feat_strides
self.dfm1 = DF_Module(hidden_dim, hidden_dim)
self.dfm2 = DF_Module(hidden_dim, hidden_dim)
self.dfm3 = DF_Module(hidden_dim, hidden_dim)
# channel projection
self.input_proj = nn.ModuleList()
for in_channel in in_channels:
self.input_proj.append(
nn.Sequential(
nn.Conv2d(in_channel, hidden_dim, kernel_size=1, bias=False),
nn.BatchNorm2d(hidden_dim)
)
)
# encoder transformer
encoder_layer = TransformerEncoderLayer(
hidden_dim,
nhead=nhead,
dim_feedforward=dim_feedforward,
dropout=dropout,
activation=enc_act)
self.encoder = nn.ModuleList([
TransformerEncoder(copy.deepcopy(encoder_layer), num_encoder_layers) for _ in range(len(use_encoder_idx))
])
# top-down fpn
self.lateral_convs = nn.ModuleList()
self.fpn_blocks = nn.ModuleList()
for _ in range(len(in_channels) - 1, 0, -1):
self.lateral_convs.append(ConvNormLayer(hidden_dim, hidden_dim, 1, 1, act=act))
self.fpn_blocks.append(
CSPRepLayer(hidden_dim * 2, hidden_dim, round(3 * depth_mult), act=act, expansion=expansion)
)
# bottom-up pan
self.downsample_convs = nn.ModuleList()
self.pan_blocks = nn.ModuleList()
for _ in range(len(in_channels) - 1):
self.downsample_convs.append(
ConvNormLayer(hidden_dim, hidden_dim, 3, 2, act=act)
)
self.pan_blocks.append(
CSPRepLayer(hidden_dim * 2, hidden_dim, round(3 * depth_mult), act=act, expansion=expansion)
)
self._reset_parameters()
def _reset_parameters(self):
if self.eval_spatial_size:
for idx in self.use_encoder_idx:
stride = self.feat_strides[idx]
pos_embed = self.build_2d_sincos_position_embedding(
self.eval_spatial_size[1] // stride, self.eval_spatial_size[0] // stride,
self.hidden_dim, self.pe_temperature)
setattr(self, f'pos_embed{idx}', pos_embed)
# self.register_buffer(f'pos_embed{idx}', pos_embed)
@staticmethod
def build_2d_sincos_position_embedding(w, h, embed_dim=256, temperature=10000.):
'''
'''
grid_w = torch.arange(int(w), dtype=torch.float32)
grid_h = torch.arange(int(h), dtype=torch.float32)
grid_w, grid_h = torch.meshgrid(grid_w, grid_h, indexing='ij')
assert embed_dim % 4 == 0, \
'Embed dimension must be divisible by 4 for 2D sin-cos position embedding'
pos_dim = embed_dim // 4
omega = torch.arange(pos_dim, dtype=torch.float32) / pos_dim
omega = 1. / (temperature ** omega)
out_w = grid_w.flatten()[..., None] @ omega[None]
out_h = grid_h.flatten()[..., None] @ omega[None]
return torch.concat([out_w.sin(), out_w.cos(), out_h.sin(), out_h.cos()], dim=1)[None, :, :]
def forward(self, feats):
assert len(feats) == len(self.in_channels)
proj_feats = [self.input_proj[i](feat) for i, feat in enumerate(feats)]
# encoder
if self.num_encoder_layers > 0:
for i, enc_ind in enumerate(self.use_encoder_idx):
h, w = proj_feats[enc_ind].shape[2:]
# flatten [B, C, H, W] to [B, HxW, C]
src_flatten = proj_feats[enc_ind].flatten(2).permute(0, 2, 1)
if self.training or self.eval_spatial_size is None:
pos_embed = self.build_2d_sincos_position_embedding(
w, h, self.hidden_dim, self.pe_temperature).to(src_flatten.device)
else:
pos_embed = getattr(self, f'pos_embed{enc_ind}', None).to(src_flatten.device)
memory = self.encoder[i](src_flatten, pos_embed=pos_embed)
proj_feats[enc_ind] = memory.permute(0, 2, 1).reshape(-1, self.hidden_dim, h, w).contiguous()
# print([x.is_contiguous() for x in proj_feats ])
# broadcasting and fusion
inner_outs = [proj_feats[-1]]
for idx in range(len(self.in_channels) - 1, 0, -1):
feat_high = inner_outs[0]
feat_low = proj_feats[idx - 1]
feat_high = self.lateral_convs[len(self.in_channels) - 1 - idx](feat_high)
inner_outs[0] = feat_high
upsample_feat = F.interpolate(feat_high, scale_factor=2., mode='nearest')
inner_out = self.fpn_blocks[len(self.in_channels)-1-idx](torch.concat([upsample_feat, feat_low], dim=1))
inner_outs.insert(0, inner_out)
outs = [inner_outs[0]]
for idx in range(len(self.in_channels) - 1):
feat_low = outs[-1]
feat_high = inner_outs[idx + 1]
downsample_feat = self.downsample_convs[idx](feat_low)
out = self.pan_blocks[idx](torch.concat([downsample_feat, feat_high], dim=1))
outs.append(out)
outs[0] = self.dfm1(proj_feats[0], outs[0])
outs[1] = self.dfm1(proj_feats[1], outs[1])
outs[2] = self.dfm1(proj_feats[2], outs[2])
return out



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









