



 本文指导如何在ROS2中处理由于找不到libroscpp.so库而引发的错误,包括查找库的位置、添加路径至ld.so.conf并执行ldconfig命令以解决共享库加载问题。
本文指导如何在ROS2中处理由于找不到libroscpp.so库而引发的错误,包括查找库的位置、添加路径至ld.so.conf并执行ldconfig命令以解决共享库加载问题。
在ros2中使用ros1_bridge时,报错:
/opt/ros/foxy/lib/ros1_bridge/dynamic_bridge: error while loading shared libraries: libroscpp.so: cannot open shared object file: No such file or directory
原因是找不到libroscpp.so这个库,所以要把这个库的路径添加到配置文件中。
下面是步骤:
1、首先要知道 找不到的这个库 在哪?
在终端执行:
find /opt/ros -name "libroscpp.so"
我的会在终端显示:
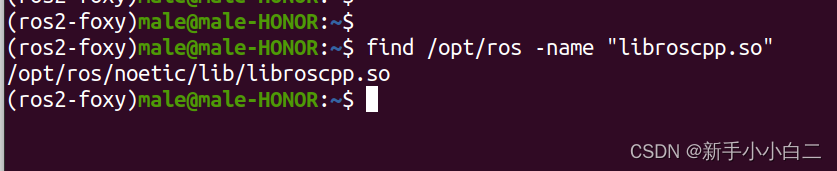
所以说这个库是存在的,路径为:/opt/ros/noetic/lib
2、找到这个库的路径之后,就要把这个路径添加到配置文件中去,
终端执行:
sudo vi /etc/ld.so.conf
用vi打开这个文件;然后把刚刚这个路径添加进去:
添加完之后,这个文件里有如下:

添加完,:wq 保存退出。
3、执行命令:
sudo ldconfig
这样就大功告成了!

















 1056
1056






 到【灌水乐园】发言
到【灌水乐园】发言







