





使用光流法对特征点或角点进行追踪时很容易丢失,而使用直接法进行追踪时曝光可能会受影响.
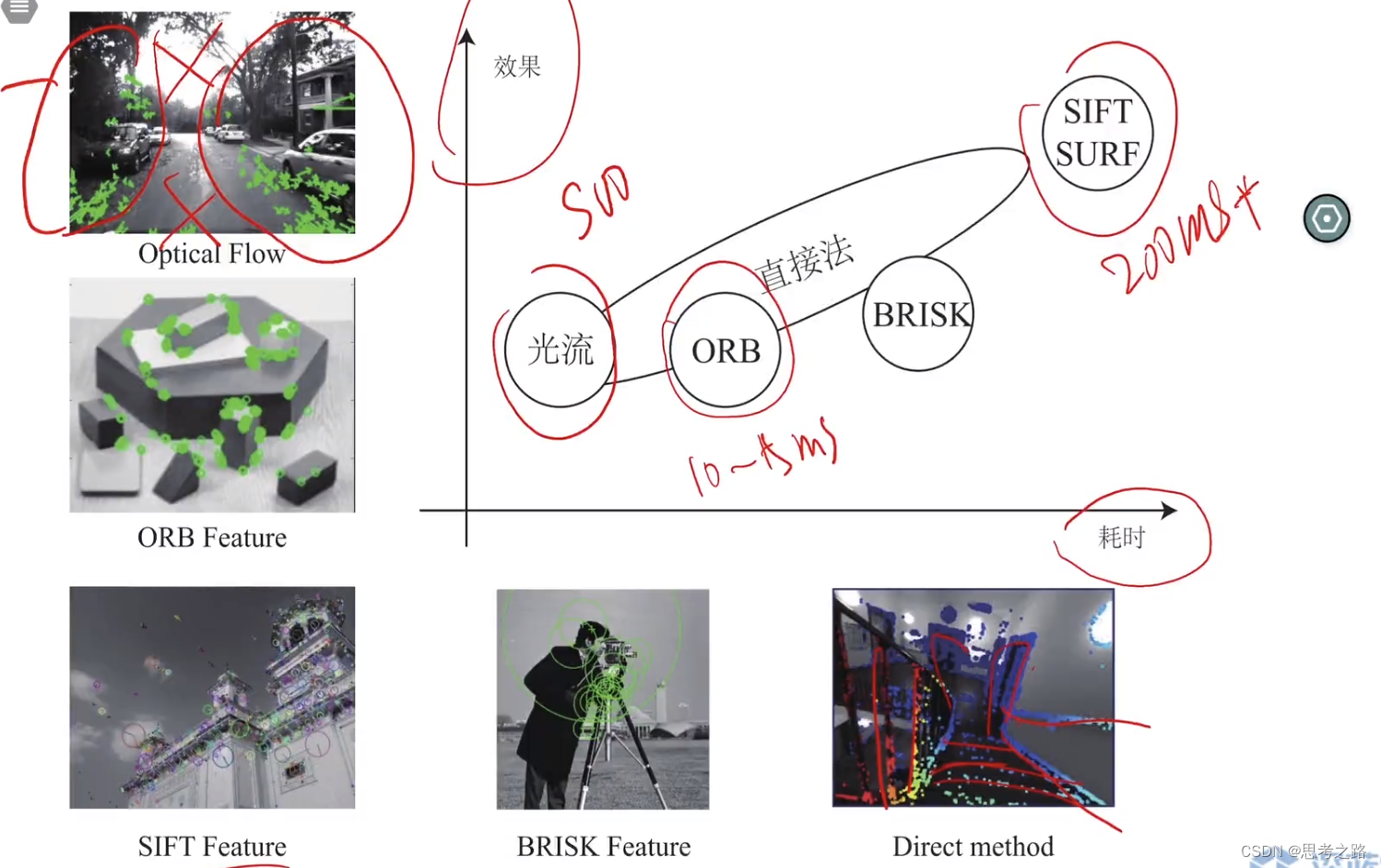
算法耗时越多,效果越好. ORB使用的是带有描述子的特征点法(直接法比特征点法效果好),直接法可以利用特征点选取的多少来决定耗时的长短进而决定追踪效果的好怀.
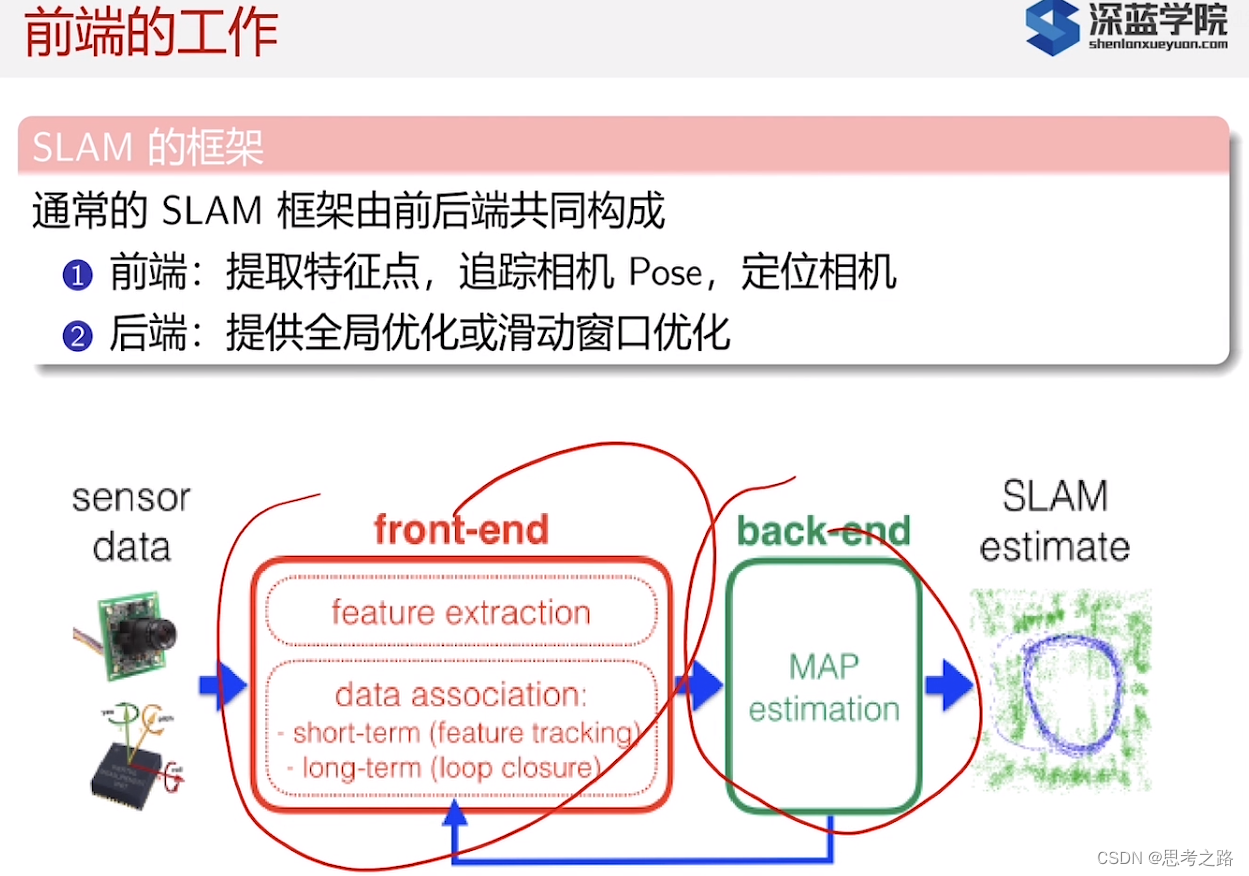
 博客介绍了视觉追踪相关内容,使用光流法追踪特征点或角点易丢失,直接法追踪可能受曝光影响,且直接法可通过特征点选取控制耗时和追踪效果。还提到放射变换包含旋转和平移,不插入关键帧会使路标点深度信息不变,插入后用BA平摊重投影误差,让后端定位更鲁棒。
博客介绍了视觉追踪相关内容,使用光流法追踪特征点或角点易丢失,直接法追踪可能受曝光影响,且直接法可通过特征点选取控制耗时和追踪效果。还提到放射变换包含旋转和平移,不插入关键帧会使路标点深度信息不变,插入后用BA平摊重投影误差,让后端定位更鲁棒。
使用光流法对特征点或角点进行追踪时很容易丢失,而使用直接法进行追踪时曝光可能会受影响.
算法耗时越多,效果越好. ORB使用的是带有描述子的特征点法(直接法比特征点法效果好),直接法可以利用特征点选取的多少来决定耗时的长短进而决定追踪效果的好怀.
 1729
975
2563
1729
975
2563


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























