




- 前端:
LKLKLK光流法:
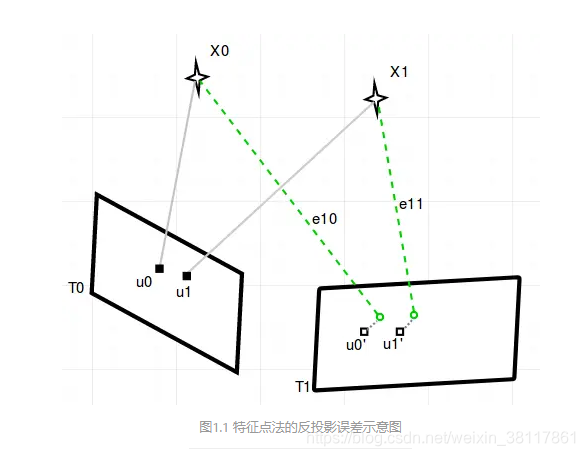
利用灰度不变性假设,计算出u0′u'_{0}u0′、u1′u'_{1}u1′:
u、v为像素点在x、y轴上的速度。 - 后端:

- IMU信息:
上述(1.1)公式再加入预计分误差。
VIO——前端和后端
最新推荐文章于 2023-10-11 17:30:07 发布
 271
2385
4006
595
271
2385
4006
595

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























