










笔记:半监督的3D语义分割
-
半监督的意义:解决三维点云标注的时间和成本代价。
-
基于点云的深度学习问题
- voxel-based method 需要大量的memory cost
- view-based method 对3D数据的密度敏感
- point-based method 表现比较好,但是需要大量的标注信息
-
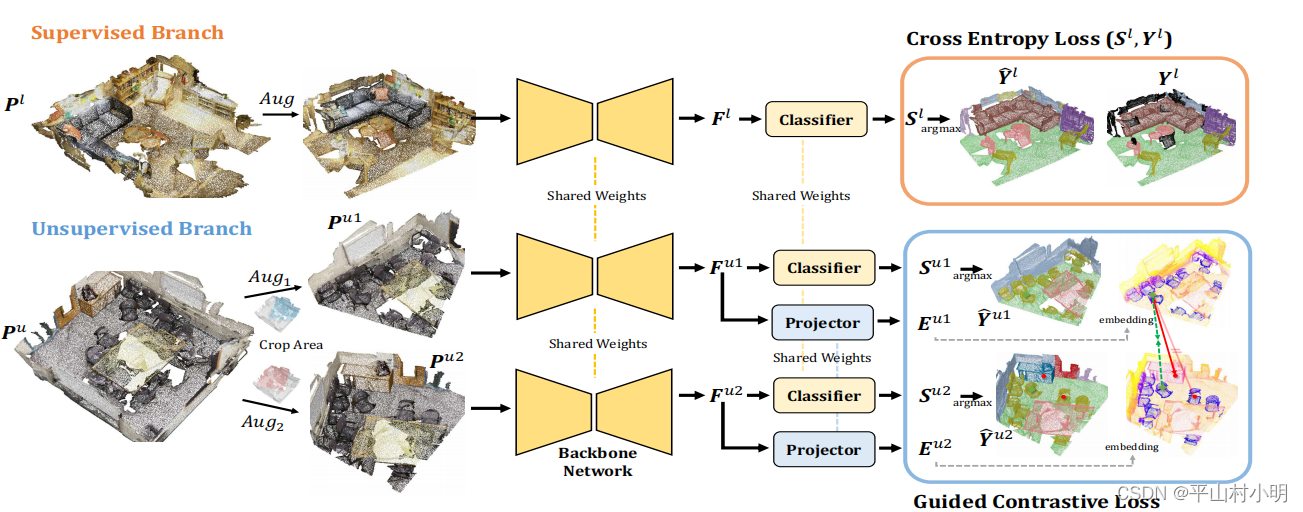
paper1:Guided Point Contrastive Learning for Semi-supervised Point Cloud Semantic Segmentation
-
It demonstrates unlabeled point clouds can help to enhance the feature learning in both indoor and outdoor scenes.
-
It extends contrastive learning to 3D point cloud semi-supervised semantic segmentation with pseudo-label guidance and confidence guidance.
- It accordingly proposes the Guided Point Contrastive Learning framework for SSL-based point cloud segmentation and leverage the semantic predictions as pseudo guidance for improving the contrastive learning on unlabeled point clouds
-
It proposes a category-balanced sampling strategy to alleviate the point class imbalance issue and to increase the embedding diversity.
-
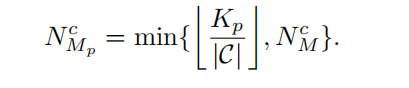
Category-balanced sampling for positive pairs: CBS evenly samples positive pairs from each category. 对于类别C,选中的positive pairs 数为:
-
Category-balanced sampling for negative point set: CBS collects negative samples from scenes in the entire training set instead of just from the current scene.(因为在在具体场景可能确实一些class)
-
-
-
paper2:SSPC-Net: Semi-supervised Semantic 3D Point Cloud Segmentation Network
- Superpoint Graph Embedding
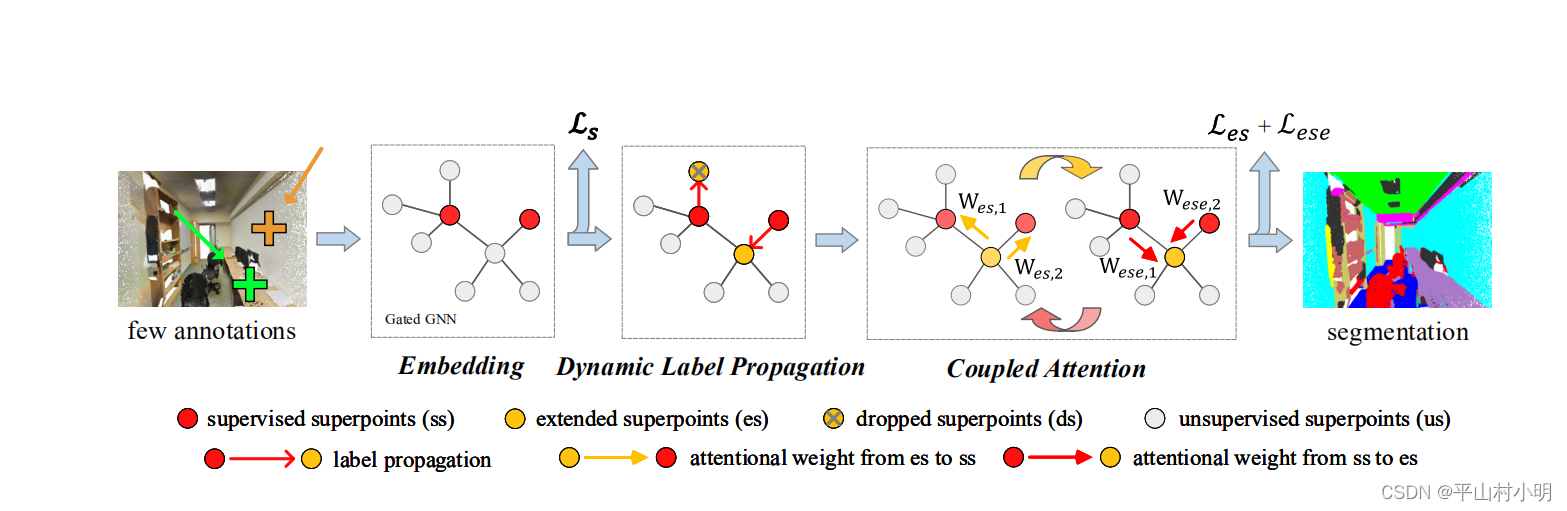
1.leverage the gated GNN to extract superpoints features. (由GNN网络提取到superpoint)
2.conduct the dynamic label propagation based on the superpoint graph strategy to generate pseudo labels.(进行动态标签传播,只考虑临近点,来产生伪标签点或者舍弃点)
3.perform a coupled attention mechanism to further boost the extraction of discriminative contextual features in the point cloud based on the supervised superpoints and the extended superpoints.(增强标签点和伪标签点的耦合关系)
Semantic Segmentation
-
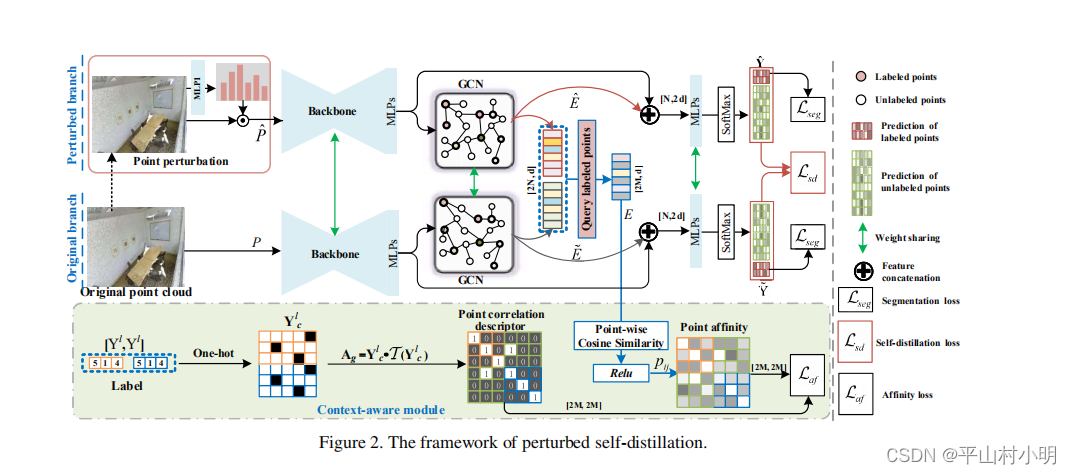
It propose a perturbed self-distillation (PSD) framework.(可以有效建立标签点和无标签点的拓扑关系)
-
context-aware module(整合到PSD来改进拓扑结构)
-
paper4:Sparse-to-dense Feature Matching: Intra and Inter domain Cross-modal Learning in Domain Adaptation for 3D Semantic Segmentation
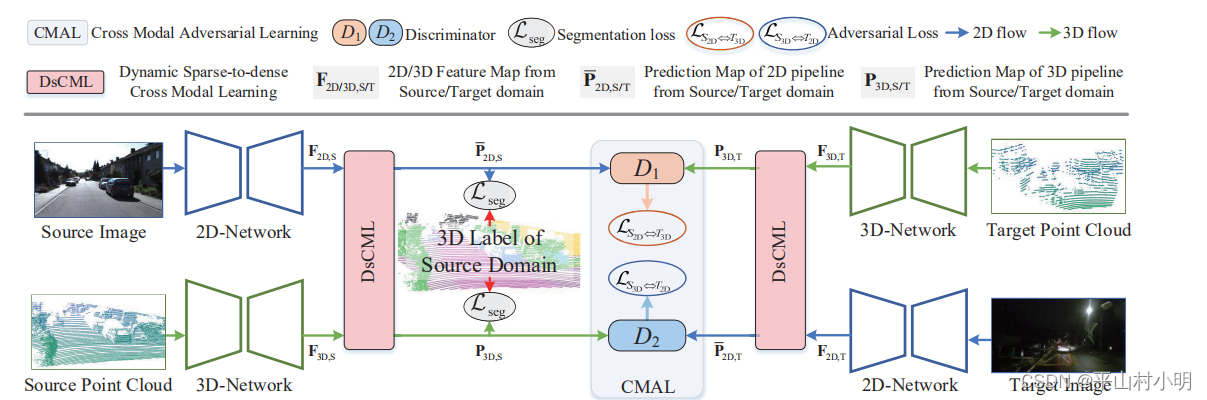
-
DsCML(动态稀疏到密集交叉模态学习策略): It enables the sparse point cloud features and dense pixel features can sufficiently interact with each other.(稀疏点云特征和密集像素特征能够充分交互)
-
CMAL(跨模态对抗学习): It is mainly utilized to narrow the domain gap by reducing the distribution difference between source and target domain.(利用对抗学习同时拉近模态间数据和域间数据的距离)

















 1112
1112

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









