



功能介绍放开头, 使用便捷无需愁
这是全网最详细、性价比最高的STM32实战项目入门教程,通过合理的硬件设计和详细的视频笔记介绍,硬件使用STM32F103主控资料多方便学习,通过3万字笔记、12多个小时视频、20多章节代码手把手教会你如何开发和调试。让你更快掌握嵌入式系统开发。
V3.3.0-STM32智能小车
视频: https://www.bilibili.com/video/BV16x4y1M7EN/?spm_id_from=333.337.search-card.all.click
V3:HAL库开发、功能:PID速度控制、PID循迹、PID跟随、遥控、避障、PID角度控制、视觉控制、电磁循迹、RTOS等功能。
第19章-OpenMV视觉循迹功能
19.0-组装和实物介绍等
组装
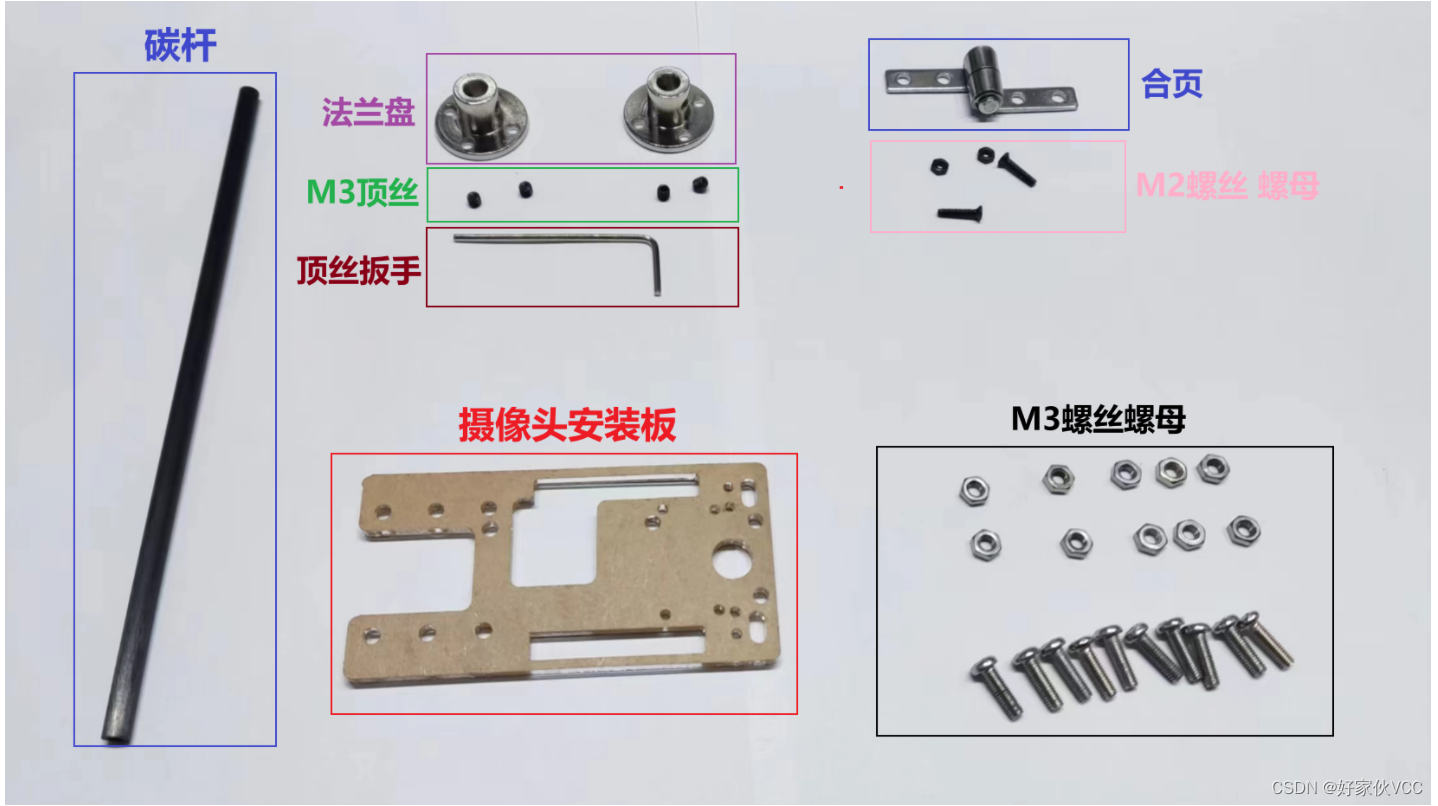
摄像头安装支架清单如下。
、
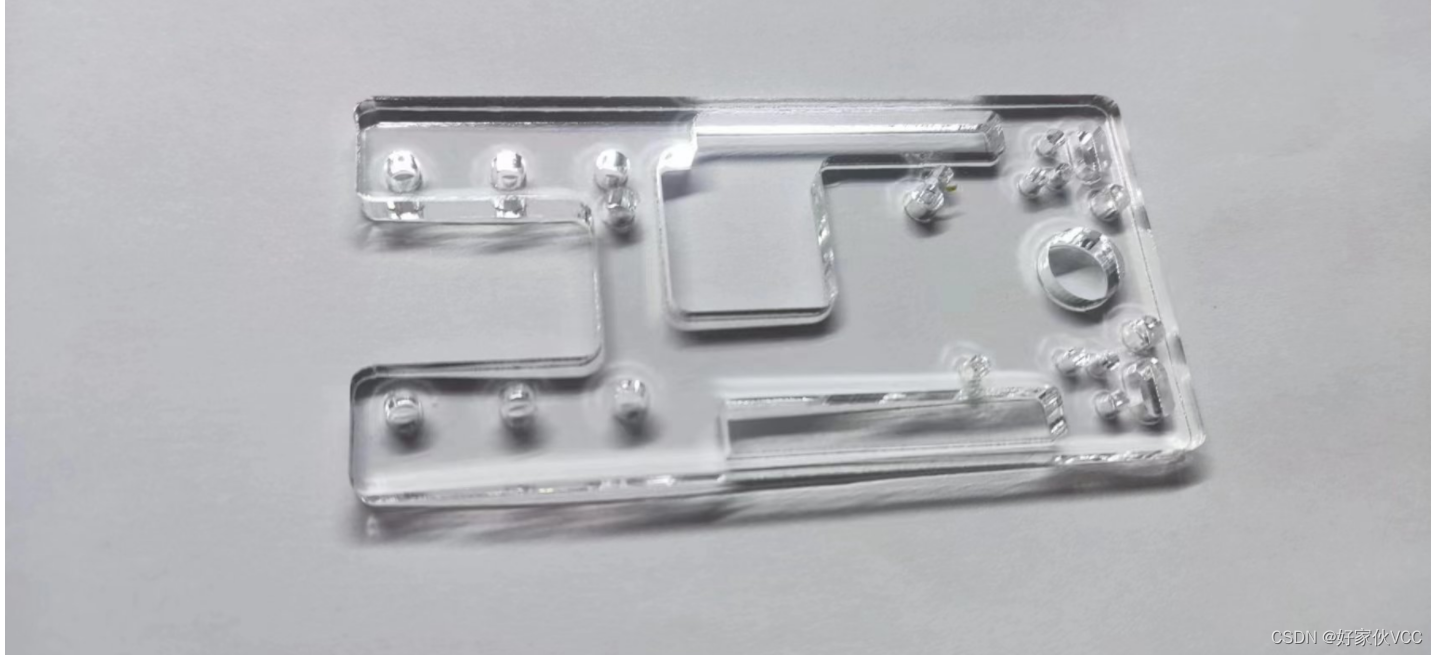
为了方便看后面丝印 建议把亚力克膜撕掉
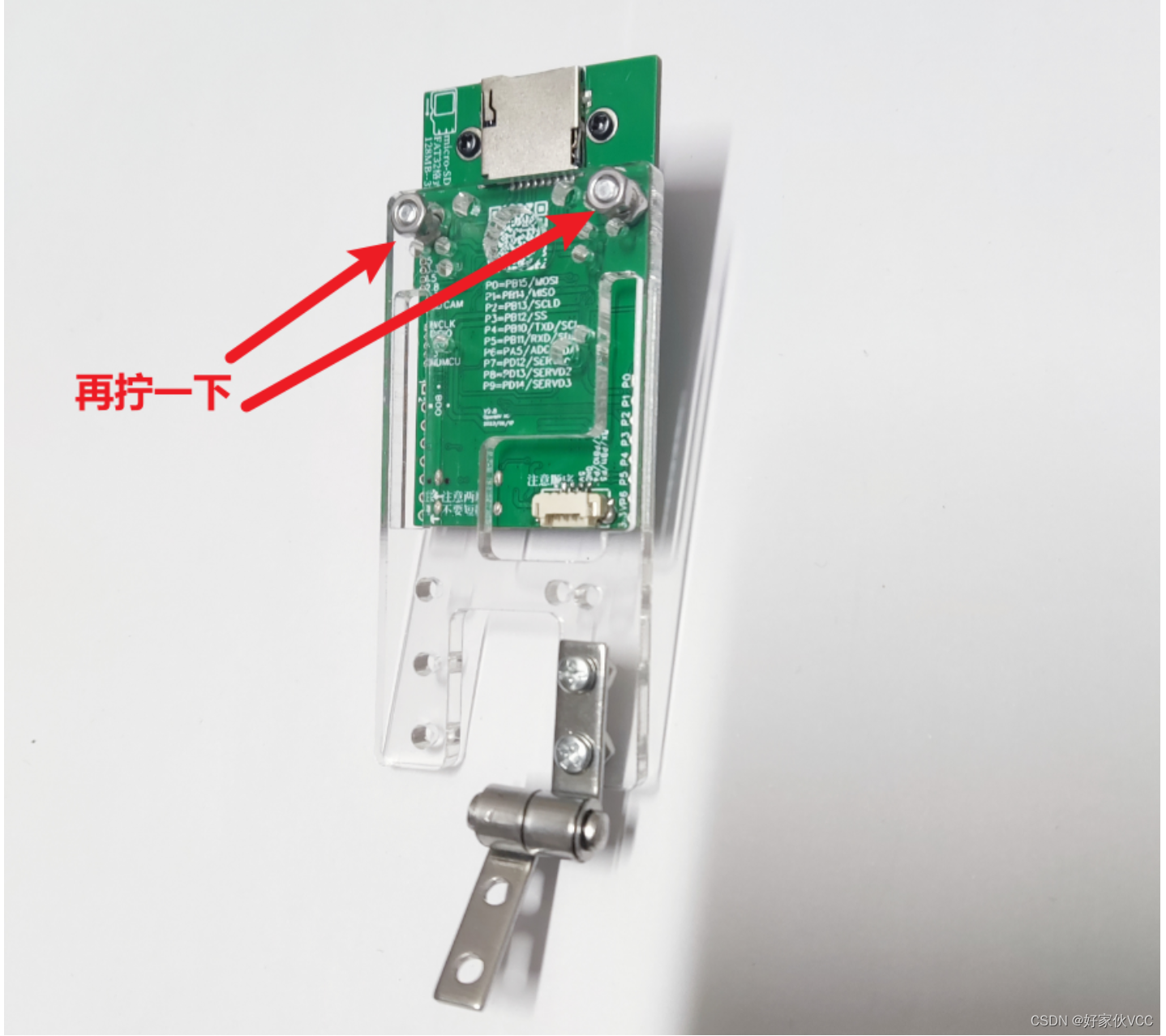
安装顺序安装如下

摄像头按照M3螺丝
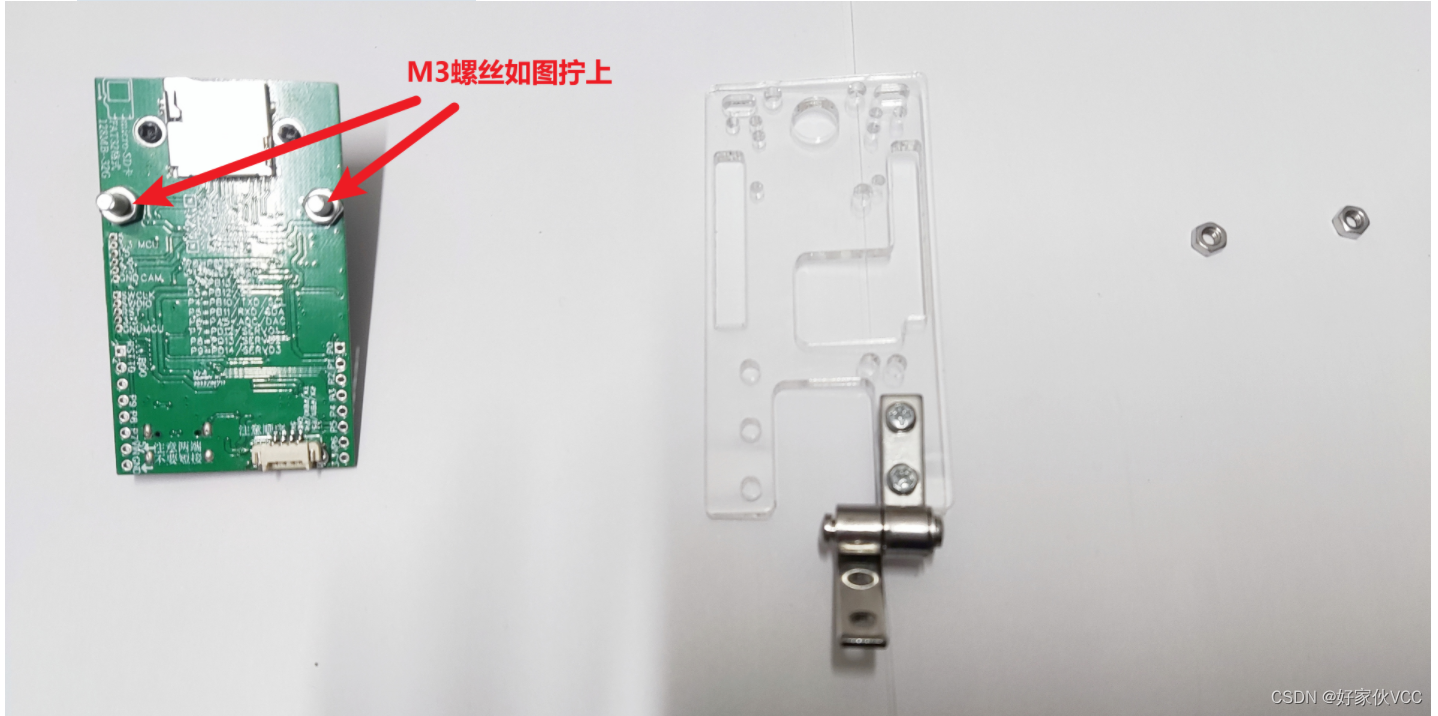
拧到一起
用M2螺丝和螺母连接
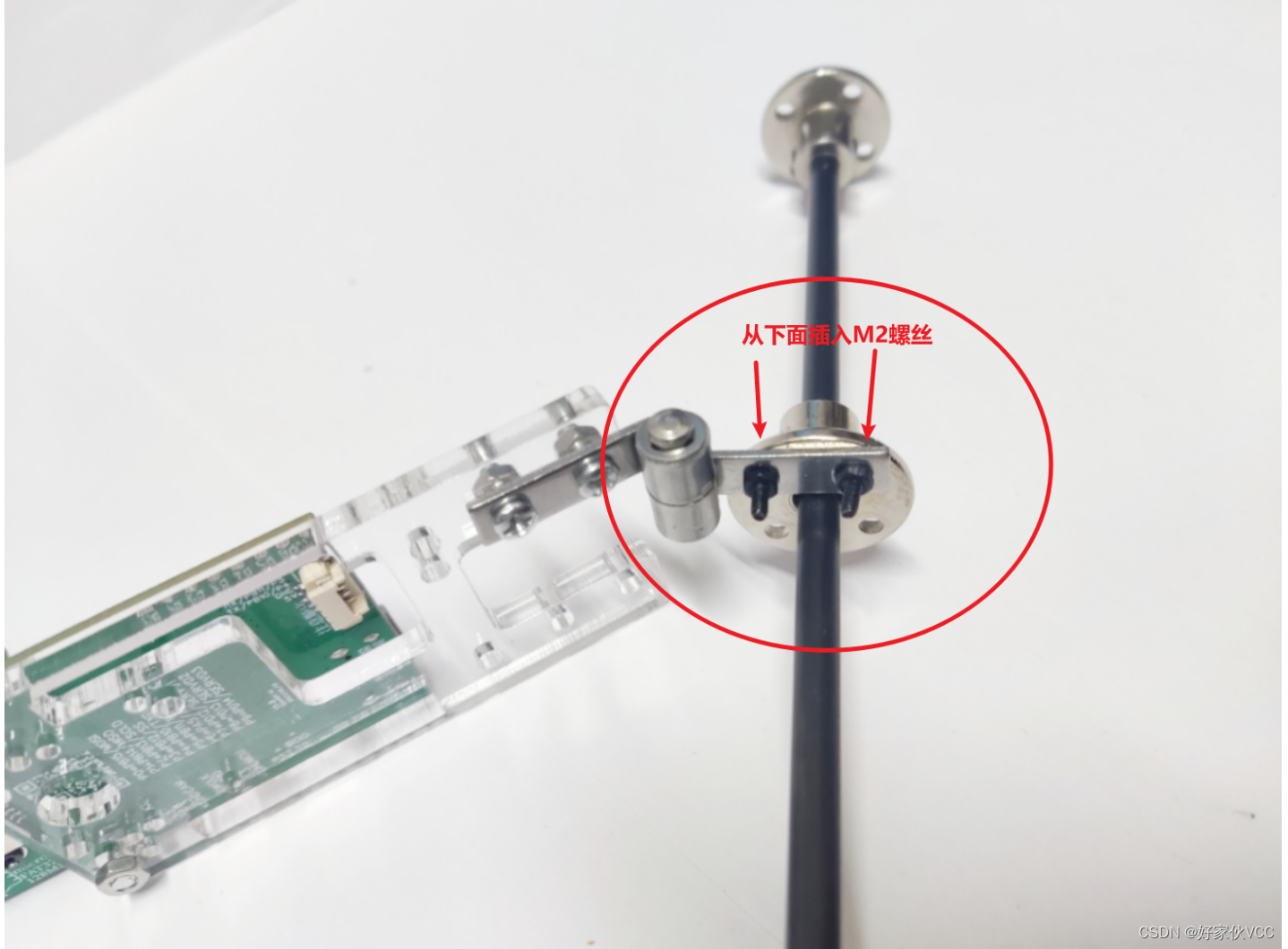
把另一个法兰盘拆掉 按照如下位置
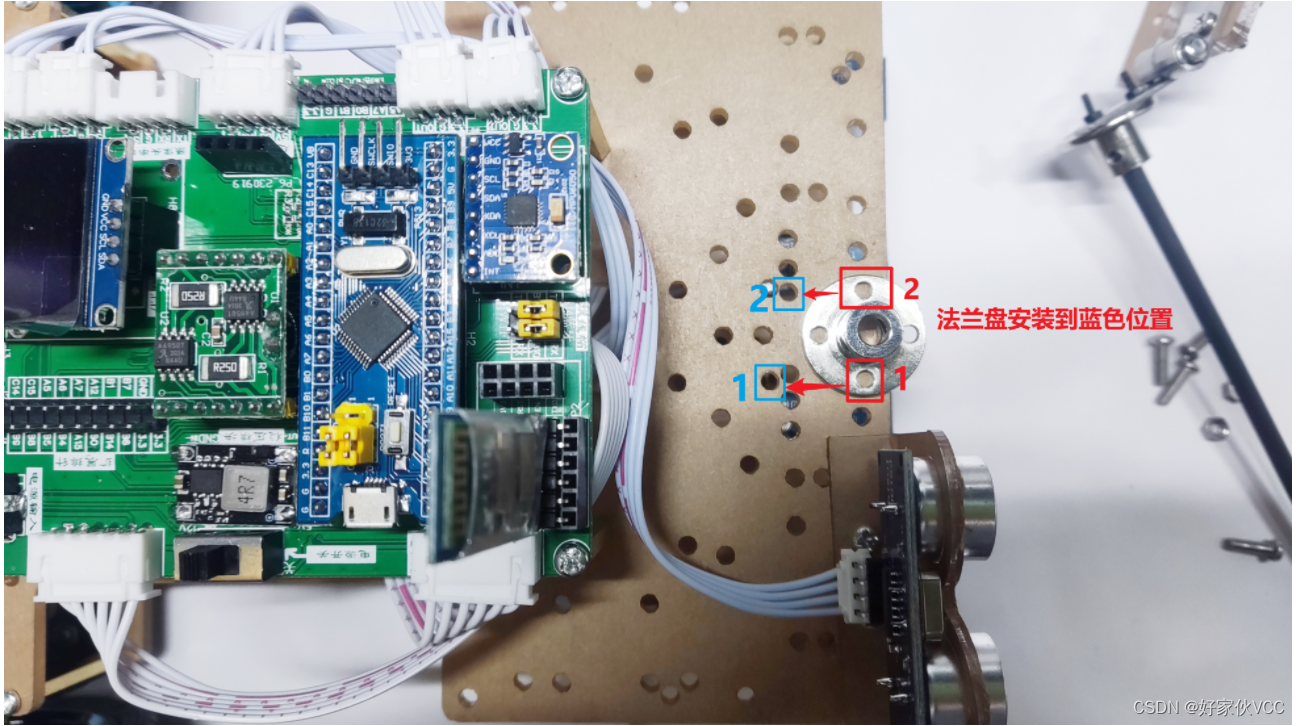
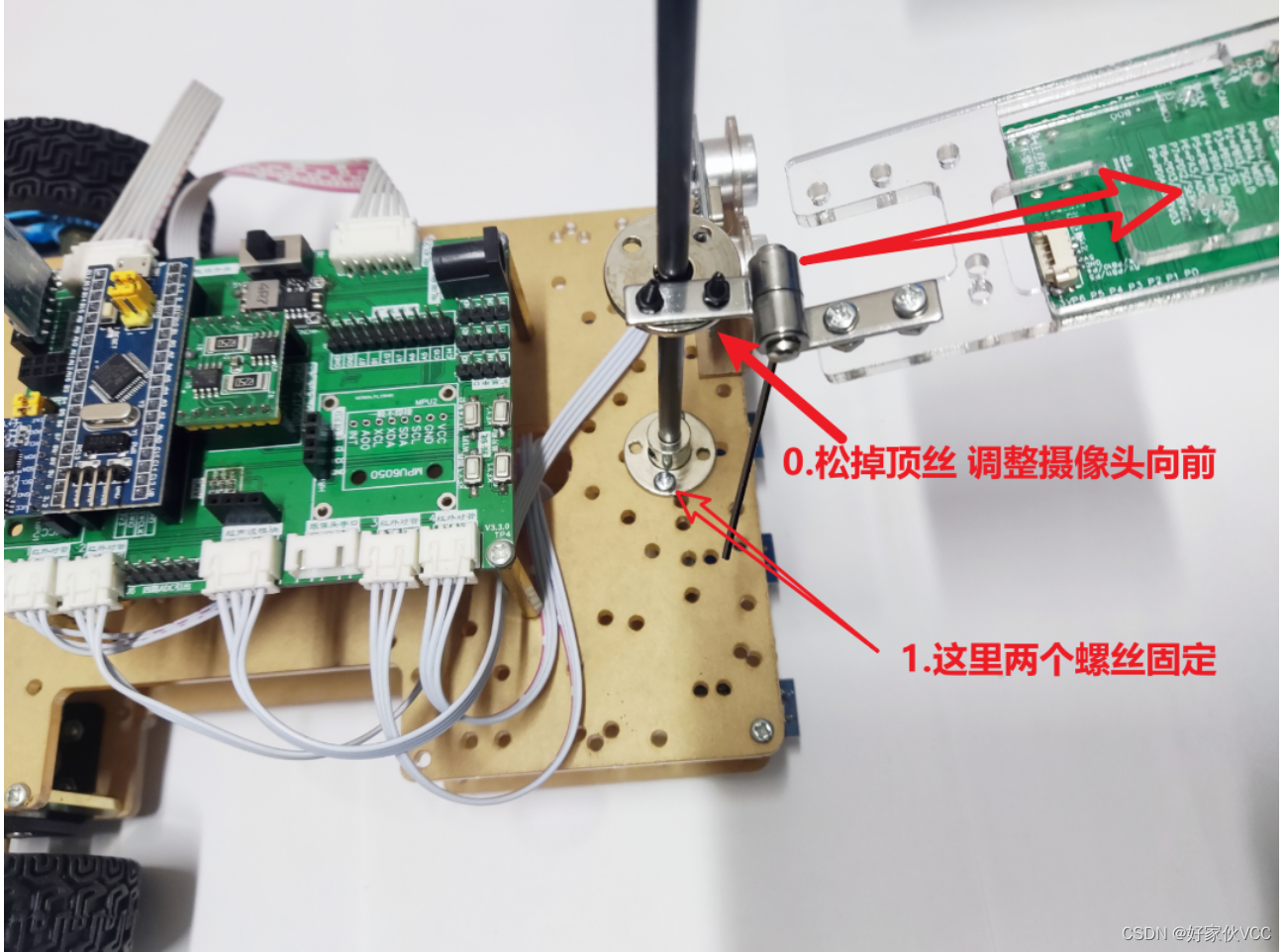
M3固定法兰盘,然后用顶丝固定碳杆
19.1-openmv介绍
OpenMV是一款优秀的开源视觉识别硬件板,旨在成为一个用于计算机视觉项目和应用的“Arduino”。
主要特点如下:
- 简单易用:编程语言是Python,使用OpenMV IDE进行代码编写与调试。这个集成开发环境提供了丰富的功能例如图像显示、视频录制,以及串口调试等,非常方便。
- 性能卓越:基于高性能MicroPython嵌入式操作系统,支持诸如图像捕获、图像处理、面部识别等诸多复杂操作。
- 支持丰富:包含丰富的API接口,可以实现多种图像处理操作,并且兼容众多类型的传感器和配件,使其可应用于多种场景之中。
- 易拓展:OpenMV设有丰富稳定的I/O端口,包括UART、I2C、SPI、CAN,此外还有12位ADC,支持MicroSD卡及USB,结构紧密小巧方便集成。
- 应用广泛:由于其强大的功能,在很多领域都可以找得到它的身影,包括:人脸检测,眼球跟踪,目标检测,自动驾驶,物品分类等。
资料和软件安装
-
关于OpenMV各种库和使用,看官网文档:
http://docs.openmv.io/ (英文网站) -
https://docs.singtown.com/ (中文网站)
-
https://docs.singtown.com/micropython/zh/latest/openmvcam/library/index.html
-
使用MicroPython 问题可以查看文档。
http://docs.micropython.org/en/latest/pyboard/
-
OpenMV论坛,有问题可以在论坛交流或者查找问题
https://forums.openmv.io/
-
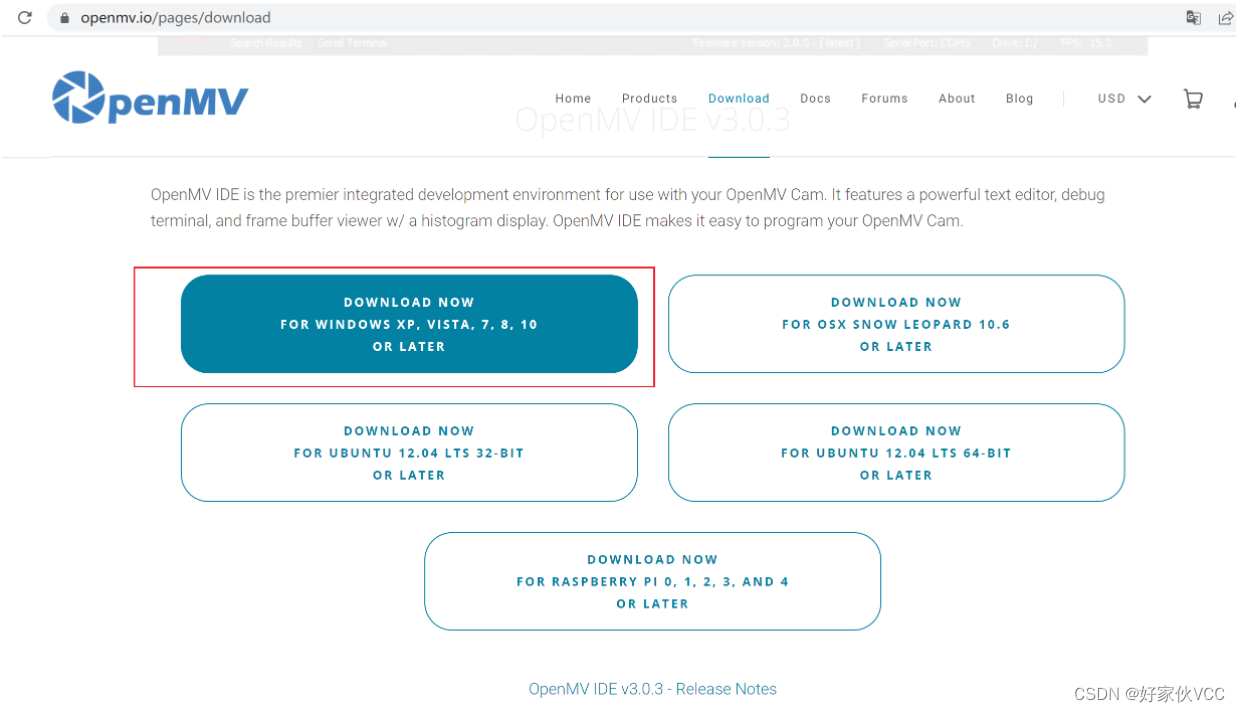
软件下载地址:https://openmv.io/pages/download (英文 速度慢)
安装步骤就按照下一步默认按照就可以(也可以换一个安装路径)
https://singtown.com/openmv-download/ (中文下载速度快)
建议使用资料包里面已经下载好
安装过程,直接同意协议,直接下一步,下一步,就安装完毕。
使用数据USB线连接到电脑,不要升级固件
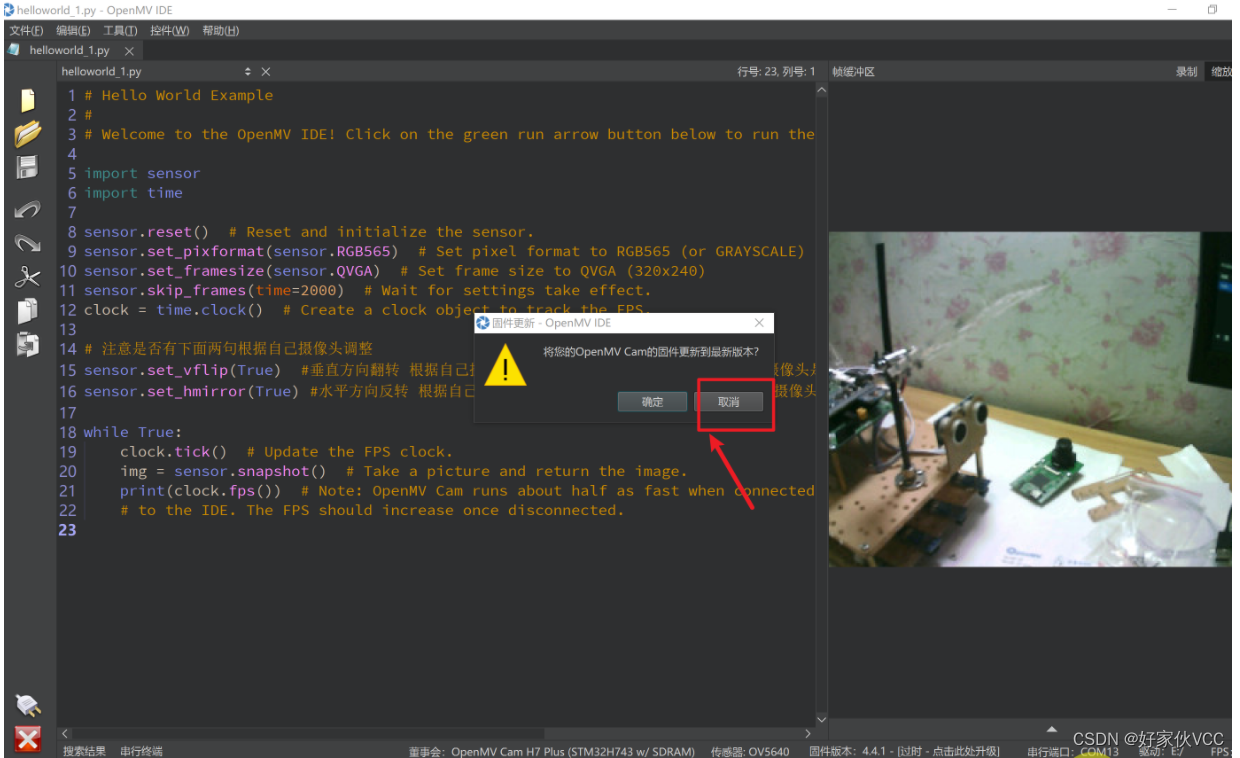
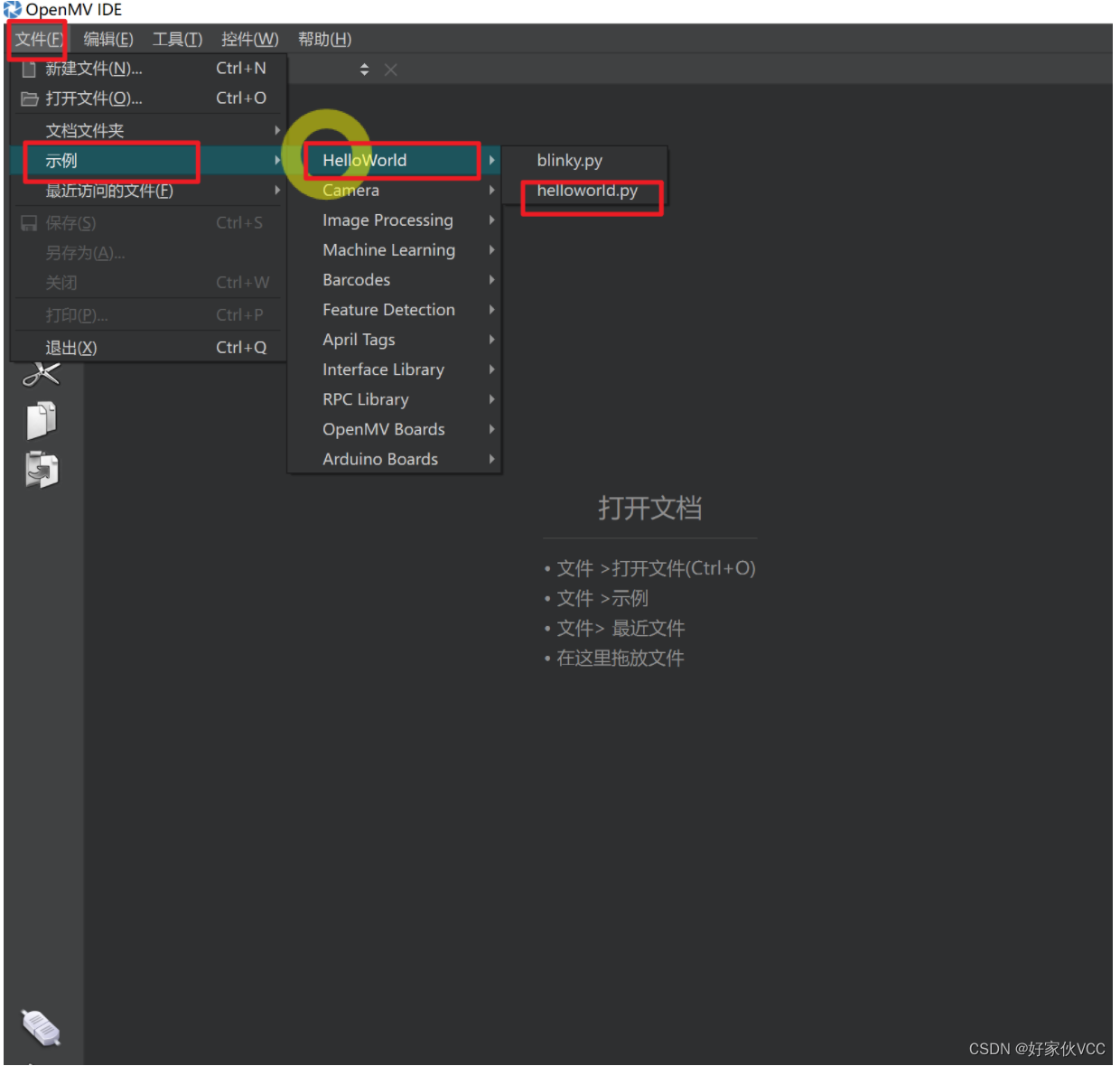
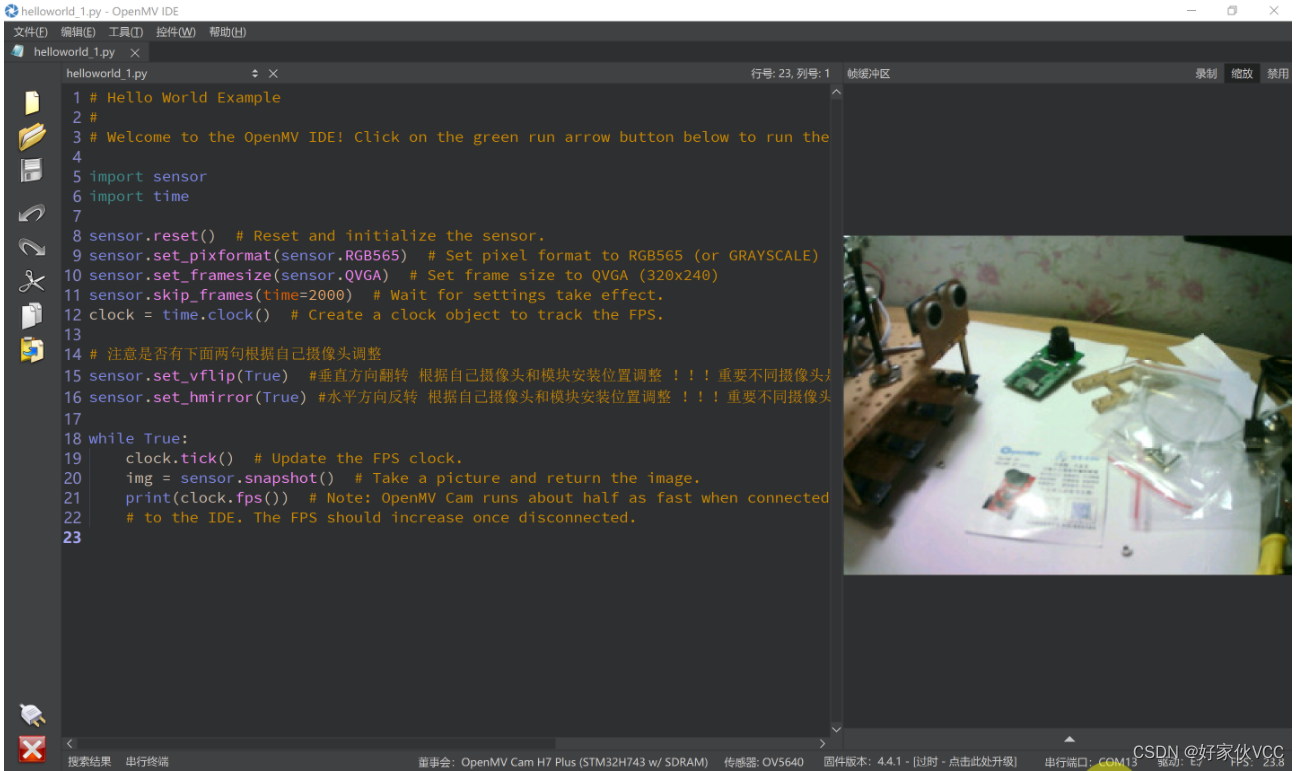
测试一下运行一个基础程序 "HelloWord"程序。
 然后查看摄像头是否需要反转、代码添加到循环之前。
然后查看摄像头是否需要反转、代码添加到循环之前。
# 注意是否有下面两句根据自己摄像头调整
sensor.set_vflip(True) #垂直方向翻转 根据自己摄像头和模块安装位置调整 !!!重要不同摄像头是否需要镜像根据实际情况定,如果不需要镜像需要注释掉
sensor.set_hmirror(True) #水平方向反转 根据自己摄像头和模块安装位置调整 !!!重要不同摄像头是否需要镜像根据实际情况定,如果不需要镜像需要注释掉
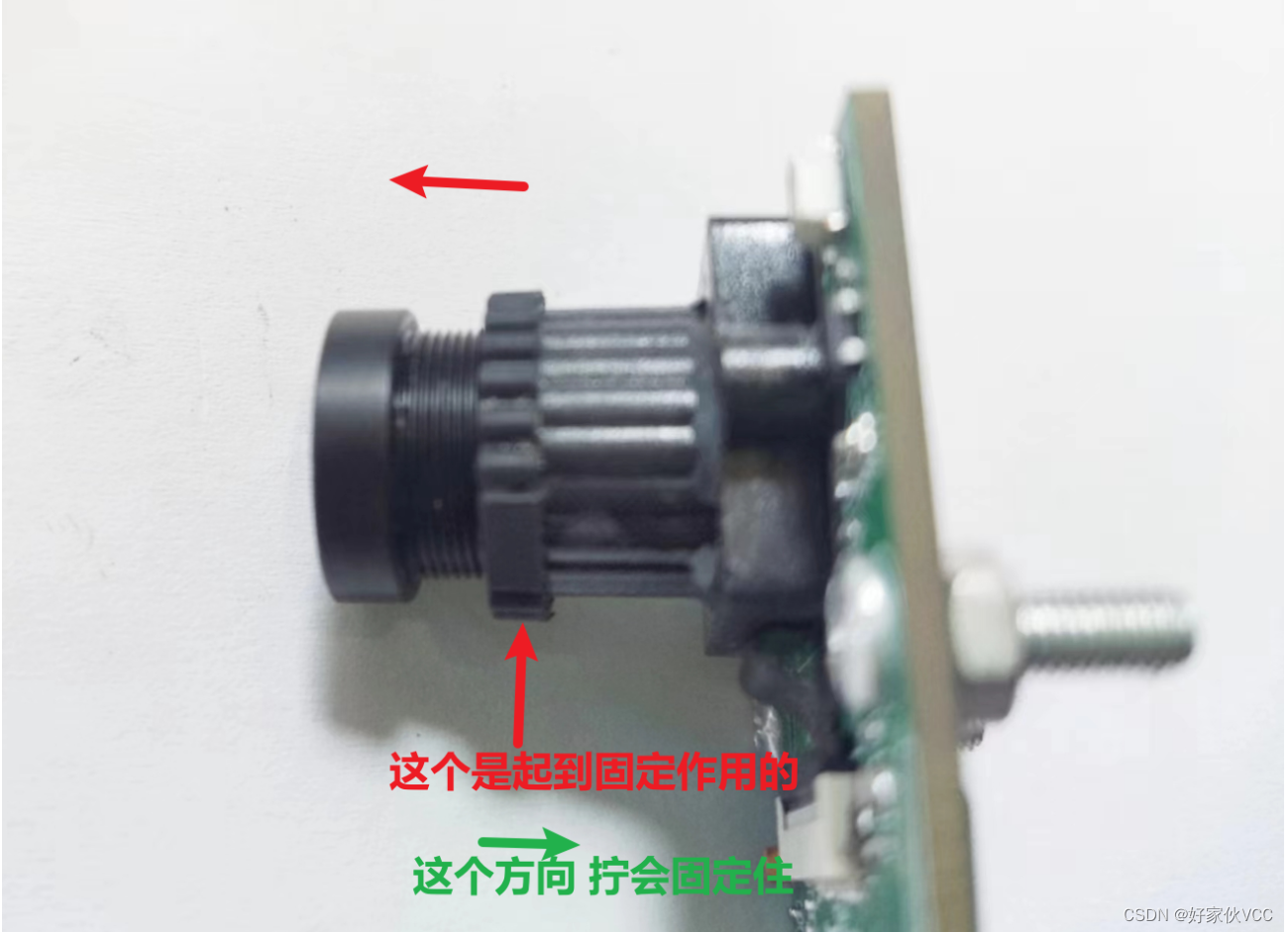
拧摄像头调焦
# Hello World Example
#
# Welcome to the OpenMV IDE! Click on the green run arrow button below to run the script!
import sensor
import time
sensor.reset() # Reset and initialize the sensor.
sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240)
sensor.skip_frames(time=2000) # Wait for settings take effect.
clock = time.clock() # Create a clock object to track the FPS.
# 注意是否有下面两句根据自己摄像头调整
sensor.set_vflip(True) #垂直方向翻转 根据自己摄像头和模块安装位置调整 !!!重要不同摄像头是否需要镜像根据实际情况定,如果不需要镜像需要注释掉
sensor.set_hmirror(True) #水平方向反转 根据自己摄像头和模块安装位置调整 !!!重要不同摄像头是否需要镜像根据实际情况定,如果不需要镜像需要注释掉
while True:
clock.tick() # Update the FPS clock.
img = sensor.snapshot() # Take a picture and return the image.
print(clock.fps()) # Note: OpenMV Cam runs about half as fast when connected
# to the IDE. The FPS should increase once disconnected.
清晰度大概如下
后面我们的章节讲解openmv 部分代码然后STM32代码然后联调


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











