







ur10与rg2的联合仿真与实时控制
感谢一位好心的博主(羊羊羊机器人)给予的帮助。
1.新建工作空间并下载功能包
工作空间建立方法请参考我其他的博文:
ros-新建ros工作空间与环境变量配置
rg2功能包下载地址:
https://github.com/sharathrjtr/ur10_rg2_ros
并将功能包拷贝到新建工作空间的src文件夹下,并且将ur功能包一同拷贝到src文件夹下。
编译错误
错误1:
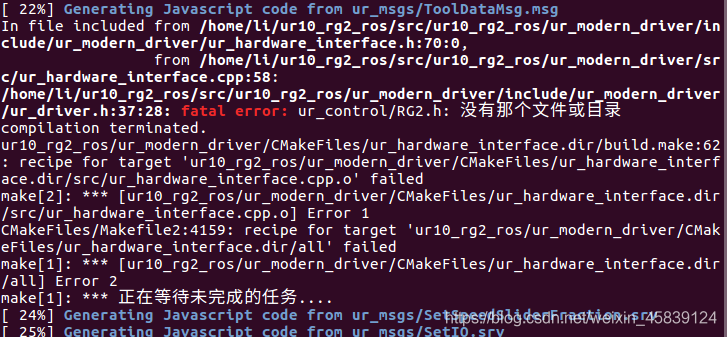
error:/home/yyang/catkin_ws/src/ur10_rg2_ros/ur_modern_driver/include/ur_modern_driver/ur_driver.h:37:28: fatal error: ur_control/RG2.h: No such file or directory
在ur_drive文件中,我引用了rg2.h这个文件。然而在文件中我们根本找不到rg2这个文件。
可以按照一下路径打开文件
解决办法:
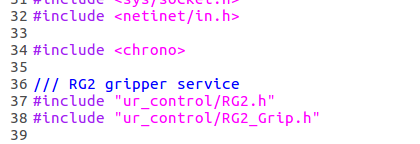
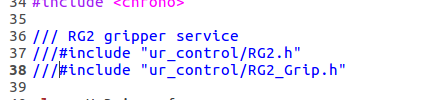
先将这几行注释到,编译一遍,不能编译成功。
然后再将注释去掉,保存文件,这时候再编译就会成功了。
#include "ur_control/RG2.h"
#include "ur_control/RG2_Grip.h"
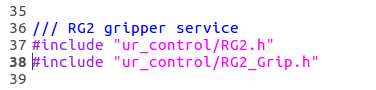
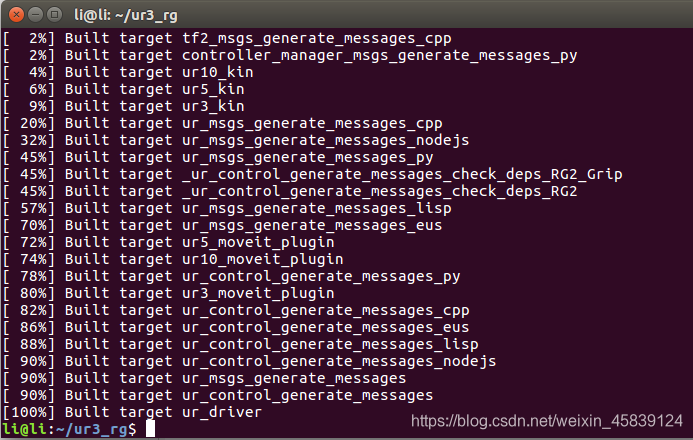
这时候我们也可以在编译后生成的devel文件中找到rg2.h文件了。

参考链接:
https://github.com/sharathrjtr/ur10_rg2_ros
UR机械臂+RG2机械手控制 学习及实际控制
https://www.freesion.com/article/521313964/


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











