







 本文详细介绍了SLAM(同时定位与建图)中的两类关键传感器:视觉传感器(单目、双目、RGBD)和激光传感器。视觉传感器利用图像信息进行定位,涉及坐标系转换和特征识别;激光传感器则依靠精确的点云数据,提供高精度的环境感知,适用于全天候运行。两者各有优劣,广泛应用于机器人定位、地图构建及避障等领域。
本文详细介绍了SLAM(同时定位与建图)中的两类关键传感器:视觉传感器(单目、双目、RGBD)和激光传感器。视觉传感器利用图像信息进行定位,涉及坐标系转换和特征识别;激光传感器则依靠精确的点云数据,提供高精度的环境感知,适用于全天候运行。两者各有优劣,广泛应用于机器人定位、地图构建及避障等领域。
文章目录
一、SLAM传感器综述
SLAM传感器分类
可见光类:相机(单目、双目)
不可见光类:激光(2D/3D)、红外、TOF
混合:RGBD
声传感器:超声波 (2D/3D),雷达

二、视觉类传感器(单目、双目、RGBD)
1.基本知识
相机的作用:一种将可见光或者电磁谱捕捉记录为一张图像(通常方便人或者设备读取或者处理)
对于数字图像:表示为通过具有有限数值表示的二维矩阵(单一通道),也叫像素,像素通常表示为一个灰度值、颜色等信息。数字化图像的灰度值是对真实场景的近似
2.成像原理
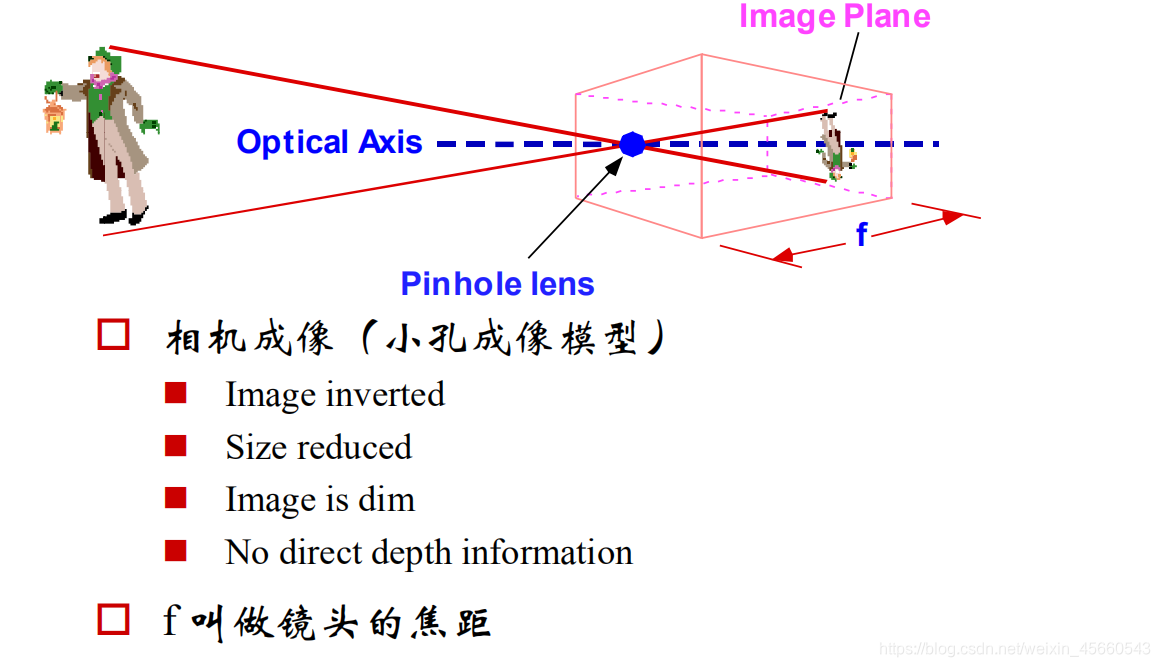
3.坐标系的转变
1.世界坐标系到相机坐标系
外参:平移T,旋转R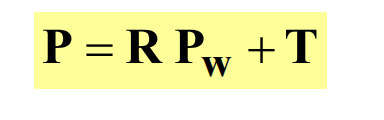
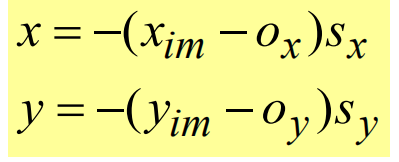
2.帧坐标系到成像平面

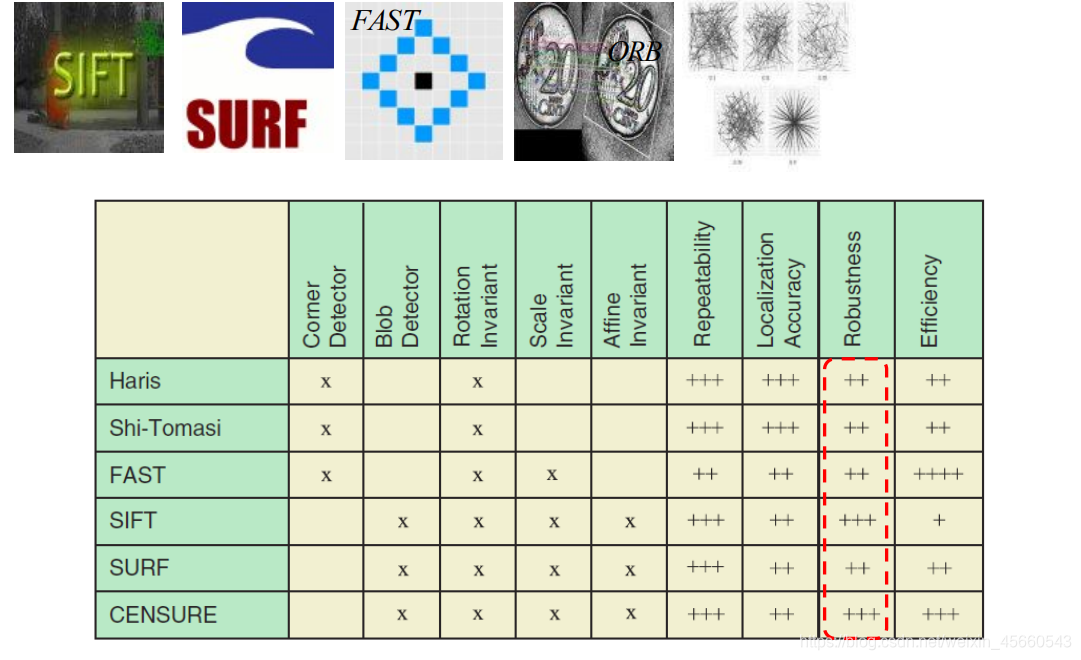
4.特征
例如高对比度区域:一般在物体的边缘
点特征、线特征、面特征
一些常用的特征:
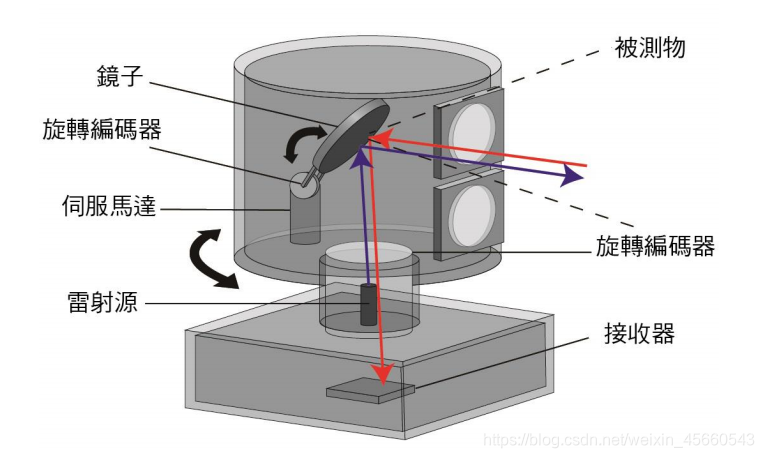
三、激光传感器
1.原理和优势
成像原理:从世界坐标系到激光传感器,在从3D点云到车体坐标系
外参:激光传感器与车体几何中心的转化关系
激光的优势:
(1)不受光照、季节的影响,适合全日时运行
(2)检测精度高,有效检测范围可达到70-100m
(3)可以根据对象的材质不同,波长的反射回率也不同
激光的劣势:
(1)价格高昂
(2)容易受到特殊天气影响(雨雪沙尘暴)
(3)无法返回丰富的纹理信息,分辨率低、视野受限
2.应用
激光里程计
高精度离线地图
多目标识别
静态障碍物设备与实时运动规划
3.激光特征与匹配
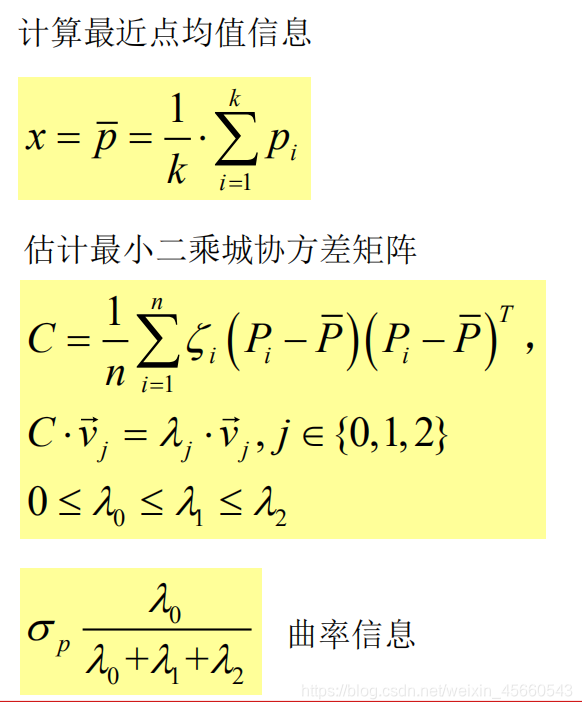
1.表面法向量
法向量的计算:
(1)曲面重建技术,从获取的点云数据集中得到采样点所对应的曲面,之后从曲面模型中计算表面法线
(2)根据邻近点云数据集近似推断表面法线量(最小乘法/PCA方法)
2.法向量特征
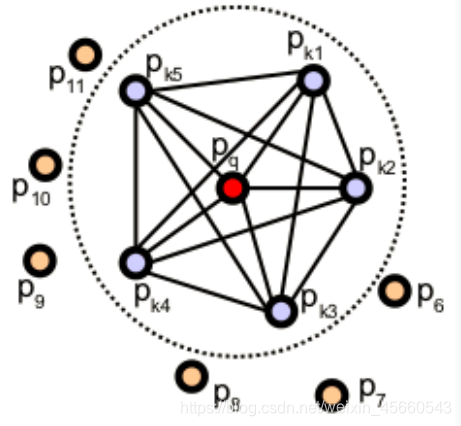
3.点特征直方图
虽然表面法向量可以用于快速计算几何对象的法向量和曲率信息,但是其无法提取更为丰富的特征信息,如果想度量两个姿态点之间的关联度,就需要12量的描述空间
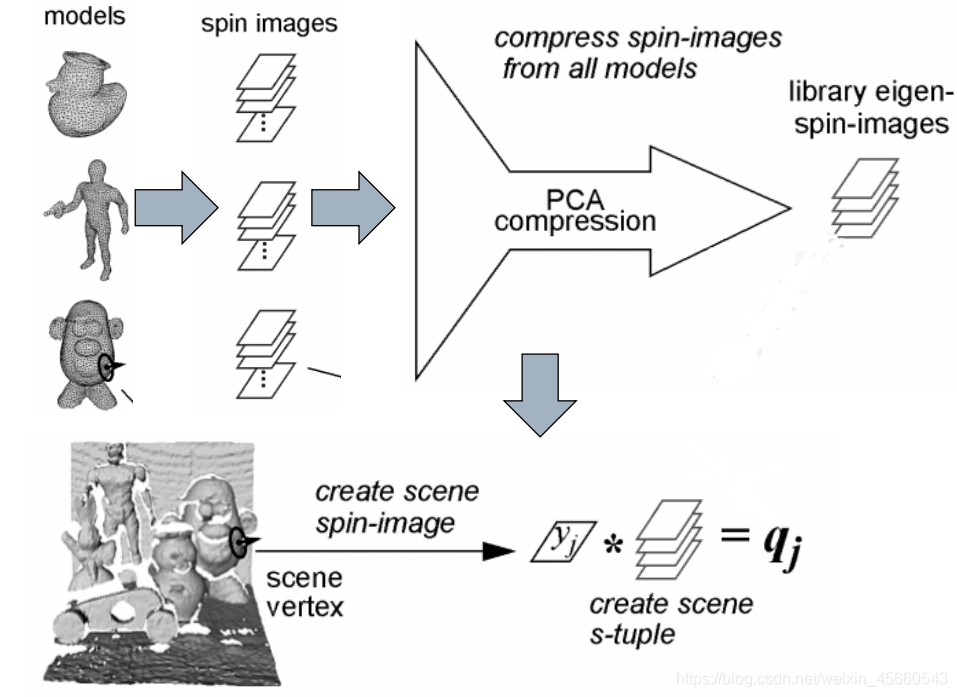
4.旋转图片
目前为止,所有的特征只能计算局部的法向量统计特性,无法提取更为丰富的几何特性,如视觉信息可以提取纹理信息,激光中可以通过旋转图片获得类似的情形
4.激光点云匹配
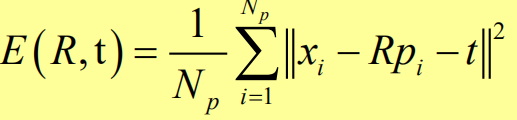
迭代最近邻匹配(ICP)
给定两组匹配点云
最小化方程,求得最优的旋转平移矩阵


















 9442
9442

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









