







autoware.universe源码略读2.4--localization:pose_initializer/pose2twist/stop_filter/twist2accel
Overview
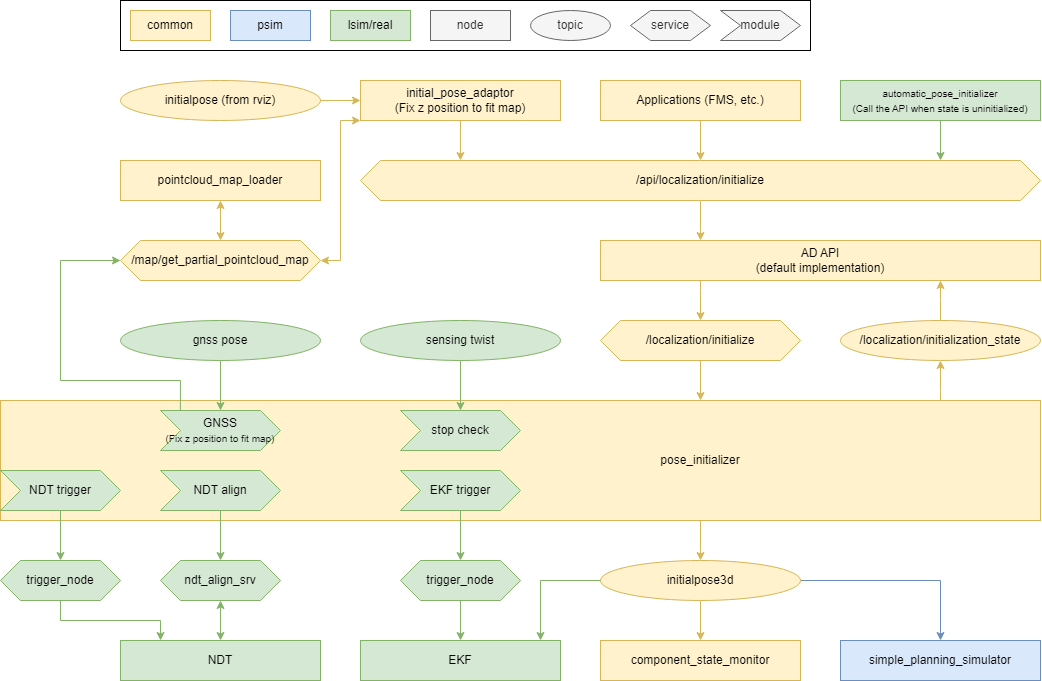
在我所在的这个galatic分支,pose_initializer是分为了两个部分,分别是map_height_fitter和pose_initializer,其中,前者是对地图高度的拟合,后者会将位置发送给了ekf_localizer,下面的流程图应该是最新版的,不过相对于galatic这个版改动还是有点多的。下面分来看一下
map_height_fitter
这个也是通过实例化一个类来实现节点调用的。在构造函数里,订阅的消息是pointcloud_map,也就是地图,然后回生成的服务就是拟合高度
sub_map_ = create_subscription<sensor_msgs::msg::PointCloud2>(
"pointcloud_map", durable_qos, std::bind(&MapHeightFitter::on_map, this, _1));
srv_fit_ = create_service<RequestHeightFitting>(
"fit_map_height", std::bind(&MapHeightFitter::on_fit, this, _1, _2));
订阅没什么好说的,就是把ROS格式的点云信息转成了pcl的格式。至于拟合高度的部分,是需要有外部点输入的
const auto & position = req->pose_with_covariance.pose.pose.position;
tf2::Vector3 point(position.x, position.y, position.z);
std::string req_frame = req->pose_with_covariance.header.frame_id;
然后如果有地图的话,会对高度进行估计,具体的估计是通过get_ground_height函数实现的。这里是先找到地图点云距离输入点最近的距离,然后以距离+1为半径画⚪,把范围内最小的z作为最终的高度
double MapHeightFitter::get_ground_height(const tf2::Vector3 & point) const
{
const double x = point.getX();
const double y = point.getY();
// find distance d to closest point
double min_dist2 = INFINITY;
for (const auto & p : map_cloud_->points) {
const double dx = x - p.x;
const double dy = y - p.y;
const double sd = (dx * dx) + (dy * dy);
min_dist2 = std::min(min_dist2, sd);
}
// find lowest height within radius (d+1.0)
const double radius2 = std::pow(std::sqrt(min_dist2) + 1.0, 2.0);
double height = INFINITY;
for (const auto & p : map_cloud_->points) {
const double dx = x - p.x;
const double dy = y - p.y;
const double sd = (dx * dx) + (dy * dy);
if (sd < radius2) {
height = std::min(height, static_cast<double>(p.z));
}
}
return std::isfinite(height) ? height : point.getZ();
}
所以这一步的目的我的理解就是:GNSS算出来的Z确实应该是表现最差的,或者像仿真的时候直接在rviz界面上画出来的位置Z并不准,根据点云地图这么来修正一下?
最新版本的代码好像把这里的内容删除了
pose_initializer
这个里面的节点也是通过实例化类实现的PoseInitializer
pose_initializer_core
在构造函数里,分别根据两个参数配置选项,gnss_enabled以及ndt_enabled分别进行GNSS模块的和NDT模块的配置,然后还有一个stop_check_enabled应该是车辆停止检测的部分。而在这里初始化的服务,感觉就是发布初始化的位置,并且把状态设置到初始化或者初始化失败的部分。接下来分开看下其他几个文件。
copy_vector_to_array
这个也是个工具性的文件,核心思想就是将协方差信息,以std::array的类型得到,因为const auto parameter = node->template declare_parameter<std::vector<double>>(name);这里得到的类型的是std::vector,因为理论上协方差的大小是固定的,所以这里就给转成array了。
gnss_module
这个模块只有两个函数,一个是构造函数,还有一个get_pose就是单纯的一个位置接口。这里的cli_map_fit变量是一个服务客户端对象的成员变量,用于与服务端进行通信。也就是说这里是和上面提到的RequestHeightFitting进行通信的一个过程,我觉得这里可以理解为取GNSS位置得时候进行一下高度的拟合?在get_pose函数里,会发送这个client的请求
const auto req = std::make_shared<RequestHeightFitting::Request>();
req->pose_with_covariance = *pose_;
auto future = cli_map_fit_->async_send_request(req);
return future.get()->pose_with_covariance;
localization_trigger_module
这是一个定位模块的触发器,类中有两个client,感觉可以简单理解client_ekf_trigger_是请求ekf定位模块的,然后client_ndt_trigger_就是用来请求ndt定位模块的。然后两个函数,deactivate用来停止两个模块,activate激活两个模块。
- 这里应该能解释之前看的疑问了?模块定位的服务是在这里以请求的形式被调用了的(应该?)
ndt_module
这个和GNSS那个模块很像,感觉也是发送调用NDT定位模块的请求,也就是align_pose函数,具体操作也是差不多的
stop_check_module
这个模块看起来是用来做车辆停止检测的,在构造函数里创建了一个订阅话题
sub_twist_ = node->create_subscription<TwistWithCovarianceStamped>(
"stop_check_twist", 1, std::bind(&StopCheckModule::on_twist, this, std::placeholders::_1));
但是在这个on_twist函数里,似乎又只是把解析出来的msg消息addTwist了,然后具体的静止检测的地方在PoseInitializer::on_initialize中
if (stop_check_ && !stop_check_->isVehicleStopped(stop_check_duration_)) {
throw ServiceException(
Initialize::Service::Response::ERROR_UNSAFE, "The vehicle is not stopped.");
}
所以根据这里的逻辑,这里应该是要求整个定位模块初始化的时候,车辆是保持静止状态的。
pose2twist
这个里面,是根据位置信息,来进行运动量(线速度和角速度)的计算。首先在构造函数中,有一个ROS2的新特性:
rclcpp::QoS durable_qos(queue_size);
durable_qos.transient_local();
这里我搜索了一下,发现这里设置的是用发布者和订阅者之间的通信质量,像下面的transient_local对应的就是一种策略,根据ChatGPT的解释:
Transient Local:
持久性:消息在发布者的生命周期内持久化,即使发布者在发布后立即退出,消息仍然会保留在系统中。
订阅者接收历史消息:当新的订阅者连接时,它们会收到发布者在其生命周期内发布的最后一条消息。这对于一些需要保留最新状态的应用场景非常有用,比如在系统启动时,新的订阅者需要了解最新的系统状态。
应用场景
设置 transient_local() 的场景包括:
状态信息:发布者发布系统的最新状态,当新的订阅者加入时,需要立即获取最新状态信息。
配置参数:发布者发布一些配置参数,当新的订阅者加入时,需要获取这些参数来正确配置自己。
具体的速度计算是通过回调函数callbackPose实现的,里面的线速度是根据三维的位置然后归到x轴一个轴上,角速度倒是会三个轴分开来算
diff_xyz.x = pose_b->pose.position.x - pose_a->pose.position.x;
diff_xyz.y = pose_b->pose.position.y - pose_a->pose.position.y;
diff_xyz.z = pose_b->pose.position.z - pose_a->pose.position.z;
diff_rpy.x = calcDiffForRadian(pose_b_rpy.x, pose_a_rpy.x);
diff_rpy.y = calcDiffForRadian(pose_b_rpy.y, pose_a_rpy.y);
diff_rpy.z = calcDiffForRadian(pose_b_rpy.z, pose_a_rpy.z);
geometry_msgs::msg::TwistStamped twist;
twist.header = pose_b->header;
twist.twist.linear.x =
std::sqrt(std::pow(diff_xyz.x, 2.0) + std::pow(diff_xyz.y, 2.0) + std::pow(diff_xyz.z, 2.0)) /
dt;
twist.twist.linear.y = 0;
twist.twist.linear.z = 0;
twist.twist.angular.x = diff_rpy.x / dt;
twist.twist.angular.y = diff_rpy.y / dt;
twist.twist.angular.z = diff_rpy.z / dt;
最后发布的,是只有x轴线速度和z轴角速度的(和车体模型是对应的)
stop_filter
这个就是很简单的一个“滤波”,和什么均值滤波、高斯滤波都不太一样,这个就是根据速度阈值判断一下是不是处在停止状态(这和之前的stop_check不重复么?),然后如果小于阈值的话,就强行设置为0了,并且把最新的odom消息发布出去。
twist2accel
这里是根据速度信息反算加速度信息,除了线速度的加速度信息,这里连角速度的加速度信息都给算了,这里还用到了下一维的低通滤波,来把加速度的值平滑一下
// 先在构造函数里定义低通滤波器
lpf_alx_ptr_ = std::make_shared<LowpassFilter1d>(accel_lowpass_gain_);
// 具体的计算函数里回计算加速度值,并执行滤波操作
double alx = (msg->twist.linear.x - prev_twist_ptr_->twist.linear.x) / dt;
accel_msg.accel.accel.linear.x = lpf_alx_ptr_->filter(alx);


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









